一种基于Petri网的柔性制造系统死锁控制方法
本发明涉及柔性制造系统控制领域,具体是一种基于petri网的柔性制造系统死锁控制方法。
背景技术:
1、与传统的制造系统不同,柔性制造系统更能够满足现代人群灵活多变的产品需求,但由于资源分配不均、资源不足等情况,柔性制造系统经常会出现死锁问题,因此,近些年科研工作者都致力于解决生产系统中的死锁问题。
2、在针对柔性制造系统的死锁问题处理过程中,主要方法是死锁预防、死锁检测与恢复、死锁避免。死锁预防通常是在离线状态下建立一个静态的资源分配系统,使系统不会进入到死锁状态,最主要的优点就是不需要运行时成本;死锁检测与恢复是建立一种死锁监测机制,去抢占死锁中的资源,使系统恢复无死锁的状态;死锁避免是一种在线控制机制,实时检测系统的资源需求情况,使系统远离死锁状态。死锁控制策略大多依赖于对petri网的分析,但在对petri网的分析过程中,计算复杂度、结构复杂度以及行为许可性大大影响了petri网控制器的生成。
3、目前,国内外学者对柔性制造系统死锁问题进行了深入研究,但是,在现有研究中,一般都是采用添加控制库所的方式,这种方式得到的控制器会大大抑制系统的行为许可性,并且当柔性制造系统的规模较大时,控制器的计算量会随着网模型的增大而呈指数型增长。
技术实现思路
1、本发明的目的在于提供一种基于petri网的柔性制造系统死锁控制方法,以解决上述背景技术中提出的在现有研究中,一般都是采用添加控制库所的方式,这种方式得到的控制器会大大抑制系统的行为许可性,并且当柔性制造系统的规模较大时,控制器的计算量会随着网模型的增大而呈指数型增长的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于petri网的柔性制造系统死锁控制方法,包括如下步骤:
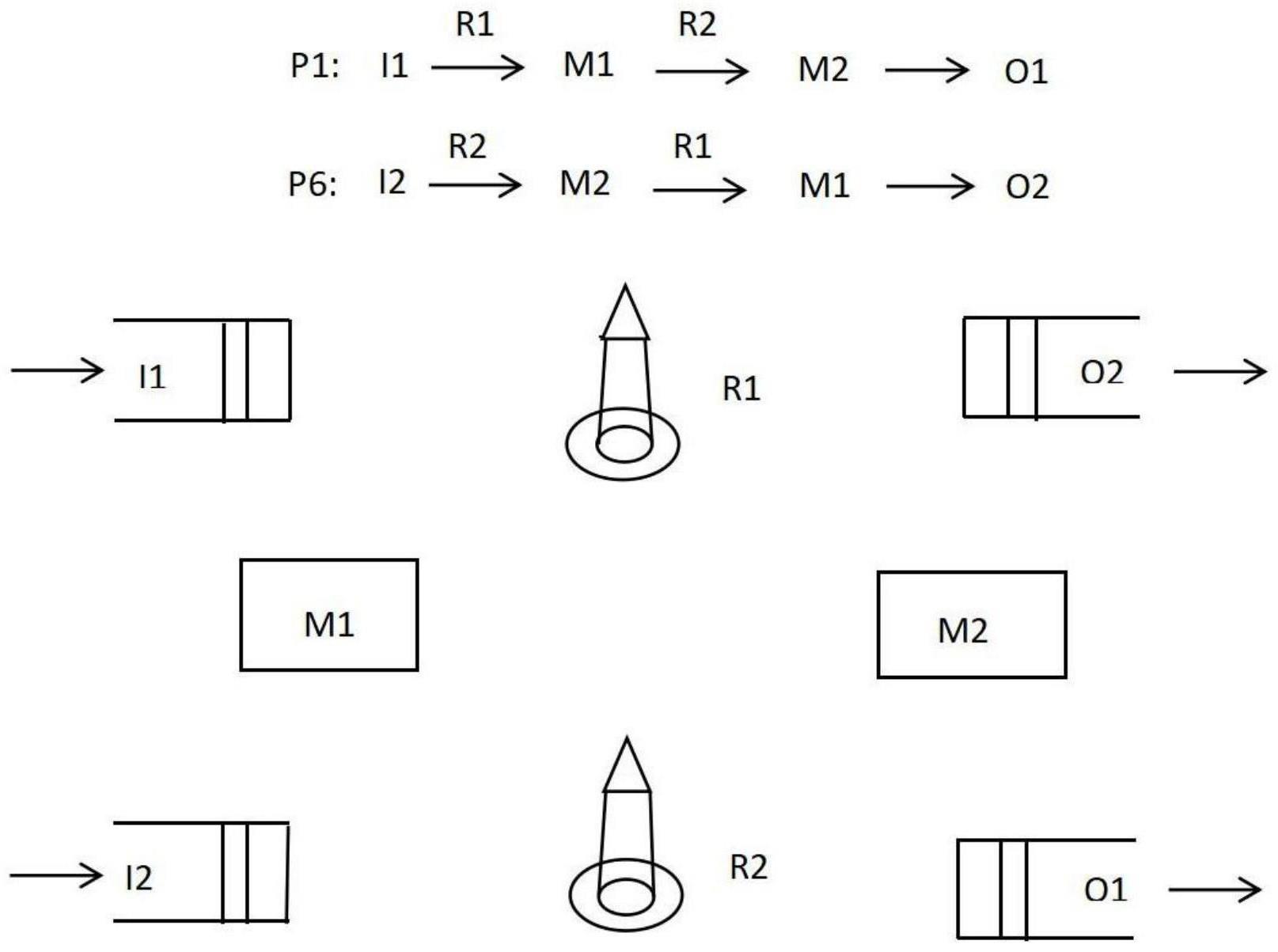
4、步骤一:根据柔性制造系统的生产关系,将柔性制造系统抽象为petri网模型(n,m0);
5、步骤二:通过共享资源库所ps对原petri网模型进行分解,分解为若干包含闲置库所的子网;
6、步骤三:检测每一个子网是否包含死锁,若含有死锁,则对该子网添加控制器进行控制;
7、步骤四:通过共享资源库所对每一个无死锁子网,受控子网依次进行融合。
8、作为本发明进一步的方案:所述步骤二中具体步骤如下:
9、s1:ps∈pr,每一个资源子网通过共享资源库所ps构建一个共享资源子网nr=(par∪r,tr,fr),r∈pr,tr={·r∪r·},par={··r∩pa}(或par={r··∩pa}),pr={r∪par},fr={((pr×tr)∪(tr×pr))∩f};
10、s2:构建条件,如果原网分解为子网和子网并且共享资源子网nr=(par∪r,tr,fr),那么必须满足条件①②t1∪t2=t,t1∩t2=tr;③f1∪f2=f,f1∩f2=fr。
11、作为本发明再进一步的方案:所述步骤二中具体步骤如下:
12、s1:通过工具tina对子网进行死锁检测;
13、s2:若检测到死锁标识,记为md,初始标识为m0,控制器按照δm=md-m0的方式计算,其中δm也可表示为o(tci)-i(tci),o(tci)和i(tci)为控制变迁tci的输出与输入
14、作为本发明再进一步的方案:所述步骤一中:n=(p,t,f),p=pa∪pr∪p0为库所的集合,t代表变迁的集合,是流关系,m0代表初始标记。
15、作为本发明再进一步的方案:所述步骤二中:通过共享资源库所ps对原petri网模型进行分解,具体是:首先,选定共享资源库所ps;其次,根据步骤b-1和b-2的条件进行分解,分解为两个或两个以上的子网模型,任意一个子网模型都包含与原网相同的闲置库所,资源库所会连同周围的变迁以及工序库所形成一个资源子网。
16、作为本发明再进一步的方案:所述步骤三中:目标标识md是从初始标识m0开始通过
17、一组变迁序列u1u2...ud的发生到达的。那么md可以被表达为
18、作为本发明再进一步的方案:所述步骤四中:将共享资源子网的受控子网进行合并时,由于添加了控制变迁,需要对合并的方式进行考虑。若共享资源子网为nr,受控子网和nr=(pr,tr,fr,wr),合并后的融合网融合后需要满足条件①② tm=t1∪t2 ; ③ fm=f1∪f2 ; ④
19、
20、与现有技术相比,本发明的有益效果是:
21、1、本发明能够恢复柔性制造系统中的所有死锁标记,识别潜在的问题区域和提高系统性能;
22、2、本发明通过分治策略,将网模型分解为多个子网进行可达图分析,避免了“状态爆炸”问题;
23、3、本发明的控制方式是针对有死锁的子系统逐个添加控制变迁进行实现的,有效降低了控制器的计算复杂性。
技术特征:
1.一种基于petri网的柔性制造系统死锁控制方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:所述步骤二中具体步骤如下:
3.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:所述步骤二中具体步骤如下:
4.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:
5.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:所述步骤二中:通过共享资源库所ps对原petri网模型进行分解,具体是:首先,选定共享资源库所ps;其次,根据步骤b-1和b-2的条件进行分解,分解为两个或两个以上的子网模型,任意一个子网模型都包含与原网相同的闲置库所,资源库所会连同周围的变迁以及工序库所形成一个资源子网。
6.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:
7.根据权利要求1所述的基于petri网的柔性制造系统死锁控制方法,其特征在于:
技术总结
本发明公开了一种基于Petri网的柔性制造系统死锁控制方法,该方法包括如下步骤:步骤一:根据柔性制造系统的生产关系,将柔性制造系统抽象为Petri网模型;步骤二:根据共享资源库所将Petri网模型分解为若干子网;步骤三:检测每一个子网死锁状况并为产生死锁的子网添加变迁控制器,恢复其死锁状态;步骤四:将所有无死锁子网和受控子网根据共享资源进行融合,得到一个无死锁的受控网,能够恢复柔性制造系统中的所有死锁标记,识别潜在的问题区域和提高系统性能,通过分治策略,将网模型分解为多个子网进行可达图分析,避免了“状态爆炸”问题,本发明的控制方式是针对有死锁的子系统逐个添加控制变迁进行实现的,有效降低了控制器的计算复杂性。
技术研发人员:冉宁,彭炀炀,郝晋渊,张照彦,张少康,郝真鸣
受保护的技术使用者:河北大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!