基于目标检测算法的航道扫测无人船自主航行控制方法及系统
本发明涉及环境感知与路径规划,特别是一种基于目标检测算法的航道扫测无人船自主航行控制方法及系统。
背景技术:
1、现阶段,航道管理与建设方面,主要依靠工作人员亲自驾驶工程测量船在航道中对各个位置进行水深测量。虽然有极少部分航道局能够使用遥测遥控技术遥控工程测量船在航道中进行水深的测量,但是这部分无人船在自主航行过程中采用的避障方法很简单,基本都是利用超声波传感器检测障碍物进行避障。此外,现有无人船的航线是通过预设的方式,提前输入到船舶控制端,不够灵活。由于超声波传感器的检测距离有限,且无法对障碍物的具体类型做出判断,从而无法针对不同的碍航物做出不同的避让措施。
2、因此,需要一种基于目标检测算法的航道扫测无人船自主航行控制方法及系统。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于目标检测算法的航道扫测无人船自主航行控制方法及系统,该方法利用摄像头采集航道图像检测航道碍航物目标并和激光雷达检测得到碍航物的属性信息,从而采取更为准确的避障措施。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明提供的基于目标检测算法的航道扫测无人船自主航行控制方法,包括以下步骤:
4、通过摄像头获取航道周围环境数据,将航道周围环境数据输入到船舶搭载的gpu嵌入式设备,利用部署的深度学习目标检测算法识别出图像帧中的碍航物类别,并记录该碍航物在图像中的位置;
5、通过激光雷达检测到该碍航物,并记录该碍航物的距离和方位信息,与图像识别结果进行结合分析,得到碍航物的属性信息,根据得到碍航物的属性信息采取无人船航行预设避障措施。
6、进一步,所述碍航物的属性信息包括碍航物类别、碍航物与无人船的距离和方位。
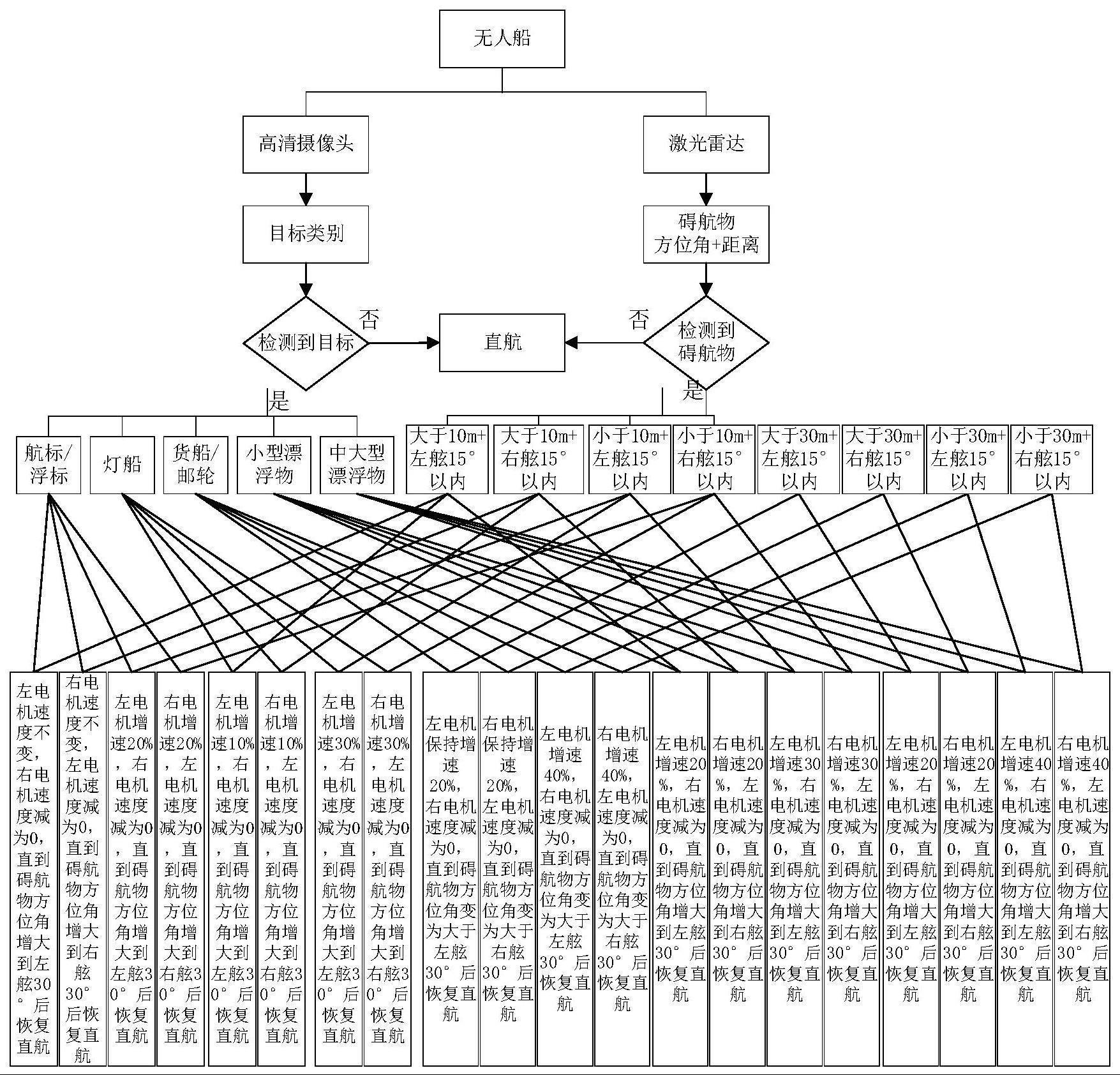
7、进一步,所述预设避障措施按照以下步骤进行:
8、如果碍航物是航标/浮标按照以下方式进行:
9、如果碍航物距离大于10m,碍航物方位角为左舷15°以内;则执行船舶左电机保持速度不变,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
10、如果碍航物距离大于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持速度不变,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航;
11、如果碍航物距离小于10米,该碍航物方位角为左舷15°以内;则执行船舶左电机增速20%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
12、如果碍航物距离小于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机增速20%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航。
13、进一步,所述预设避障措施按照以下步骤进行:
14、如果碍航物是灯船按照以下方式进行:
15、如果碍航物距离大于10m,碍航物方位角为左舷15°以内;则执行船舶左电机保持增速10%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
16、如果碍航物距离大于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速10%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航;
17、如果碍航物距离小于10米,该碍航物方位角为左舷15°以内;则执行船舶左电机保持增速30%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
18、如果碍航物距离小于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速30%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航。
19、进一步,所述预设避障措施按照以下步骤进行:
20、如果碍航物是货船/邮轮按照以下方式进行:
21、如果碍航物距离大于30m,碍航物方位角为左舷15°以内(即碍航物方位角大于左舷0°小于左舷15°,此情况为正面相遇状态或追越状态);则执行船舶左电机保持增速20%,右电机速度减为0,直到碍航物方位角变为大于左舷30°后恢复直航;
22、如果碍航物距离大于30米,该碍航物方位角为右舷15°以内(即碍航物方位角大于右舷0°小于右舷15°,此情况为正面相遇状态或追越状态);则执行船舶右电机保持增速20%,左电机速度减为0,直到碍航物方位角变为大于右舷30°后恢复直航;
23、如果碍航物距离小于30米,该碍航物方位角为左舷15°以内(即碍航物方位角大于左舷0°小于左舷15°,此情况为正面相遇状态或追越状态);则执行船舶左电机增速40%,右电机速度减为0,直到碍航物方位角变为大于左舷30°后恢复直航;
24、如果碍航物距离小于30米,该碍航物方位角为右舷15°以内(即碍航物方位角大于右舷0°小于右舷15°,此情况为正面相遇状态或追越状态);则执行船舶右电机增速40%,左电机速度减为0,直到碍航物方位角变为大于右舷30°后恢复直航。
25、进一步,所述预设避障措施按照以下步骤进行:
26、如果碍航物是小型漂浮物按照以下方式进行:
27、如果碍航物距离大于10m,碍航物方位角为左舷15°以内;则执行船舶左电机保持增速20%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
28、如果碍航物距离大于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速20%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航;
29、如果碍航物距离小于10米,该碍航物方位角为左舷15°以内;则执行船舶左电机保持增速30%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
30、如果碍航物距离小于10米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速30%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航。
31、进一步,所述预设避障措施按照以下步骤进行:
32、如果碍航物是中大型漂浮物按照以下方式进行:
33、如果碍航物距离大于30m,碍航物方位角为左舷15°以内;则执行船舶左电机保持增速20%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
34、如果碍航物距离大于30米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速20%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航;
35、如果碍航物距离小于30米,该碍航物方位角为左舷15°以内;则执行船舶左电机保持增速40%,右电机速度减为0,直到碍航物方位角增大到左舷30°后恢复直航;
36、如果碍航物距离小于30米,该碍航物方位角为右舷15°以内;则执行船舶右电机保持增速40%,左电机速度减为0,直到碍航物方位角增大到右舷30°后恢复直航。
37、本发明提供的基于目标检测算法的航道扫测无人船自主航行控制系统,包括航道检测模块、路由器和嵌入式系统;
38、所述嵌入式系统分别与设置于船体上航道检测模块、路由器连接;
39、所述航道检测模块用于采集航道信息,通过航道信息得到航道上的障碍物信息;
40、所述嵌入式系统,用于处理分析航道图像信息得到碍航物属性信息并根据碍航物属性信息生成用于控制无人船的避障措施,所述避障措施如下:
41、所述航道检测模块通过设置于船体上的扫测系统采集航道上是否存在通航障碍物,如果存在障碍物则计算船体与障碍物的距离,如果距离大于预设安全距离,则无人船自主航行,如果距离小于或等于预设安全距离,则产生报警信号并发送到远端,提醒远端需要对船进行人工控制。
42、进一步,包括船体、远程遥控终端、云服务器端和设置于船体上的电源、动力系统、通信模块;
43、所述动力系统包括电机驱动系统;所述电机设置于船体上,所述电机通过带动螺旋桨推动器来使得无人船运动;
44、所述通信模块设置于船体上,与嵌入式系统通信连接;
45、所述云服务器与通信模块通信连接,用于传输数据;
46、所述远程遥控终端与云服务器通信连接,用于传输控制指令。
47、进一步,所述航道检测模块包括激光雷达、可见光高清网络摄像头;
48、所述激光雷达,用于检测船体周围的碍航物,主要是船体前方的碍航物,所检测到的碍航物的信息包括碍航物相对船舶的距离和方位,并将所检测到的碍航物信息输入到船舶控制系统;
49、所述可见光高清网络摄像头,用于对船体周围的实时环境进行成像,并将形成的图像帧输入到船舶的目标检测检测进行碍航物的类别和位置自动识别,同时对形成的图像帧利用部署在云端的视频流媒体服务进行推流服务,以便在远程手机app端能够实时查看船舶周围的动态。
50、本发明的有益效果在于:
51、本发明提供的基于目标检测算法的航道扫测无人船自主航行控制方法及系统,该船能够利用无人船搭载的高性能gpu嵌入式终端及相应的目标检测算法,实现碍航物具体类型的识别,从而实现更精准的控制,同时,搭载了激光雷达,对碍航物的距离测量更加精准。此外,本发明的船舶航线可以随时在远程控制端进行输入,随时更新航线,结合搭载的姿态仪使得无人船的自主航行更加精准。
52、本发明的无人船具有两种运动模式:自主航行模式和人工控制模式。本发明的远程监控技术可以实现在远程手机端app上和电脑网页端同时查看船舶当前周围的实时环境。在人工控制模式下,能够在手机端或者电脑端对船舶发送远程控制指令,对船舶进行人工控制航行;在自主航行模式下,船舶能够根据远程手机端或者电脑端发送的预设航线并结合相应的避障措施进行自主航行,预设航线可在手机app端通过地图选点的方式进行各个航路点的选择,选择好各个航路点后,自动形成航线,并通过远程通信发送到船舶端。
53、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!