一种双足机器人踝关节控制的逆运动学求解方法及装置与流程
本说明书涉及机器人,尤其涉及一种双足机器人踝关节控制的逆运动学求解方法及装置。
背景技术:
1、在采用并联机构驱动踝关节进而控制双足机器人行走时,具体可以有多种实现方式,如,利用行星滚珠丝杆驱动结合连杆传动,或是通过电机曲柄驱动结合连杆传动。相比于丝杆驱动结合连杆传动的方式,曲柄驱动结合连杆传动的方式具有更快的响应速度与更高的运动性能。但在通过并联曲柄连杆机构驱动踝关节进而控制双足机器人行走的场景下,现有技术中没有给出具体该如何控制踝关节电机进行转动,特别是如何将踝关节的转动通过逆运动学转化为踝关节电机的转动。
2、因此,针对采用并联曲柄连杆机构驱动的双足机器人踝关节,如何通过逆运动学将踝关节的转动转化为踝关节电机的转动,进而控制踝关节电机实现双足机器人行走,则是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种双足机器人踝关节控制的逆运动学求解方法及装置,以部分地解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种双足机器人踝关节控制的逆运动学求解方法,所述双足机器人踝关节通过并联曲柄连杆以及关节电机进行控制,包括:
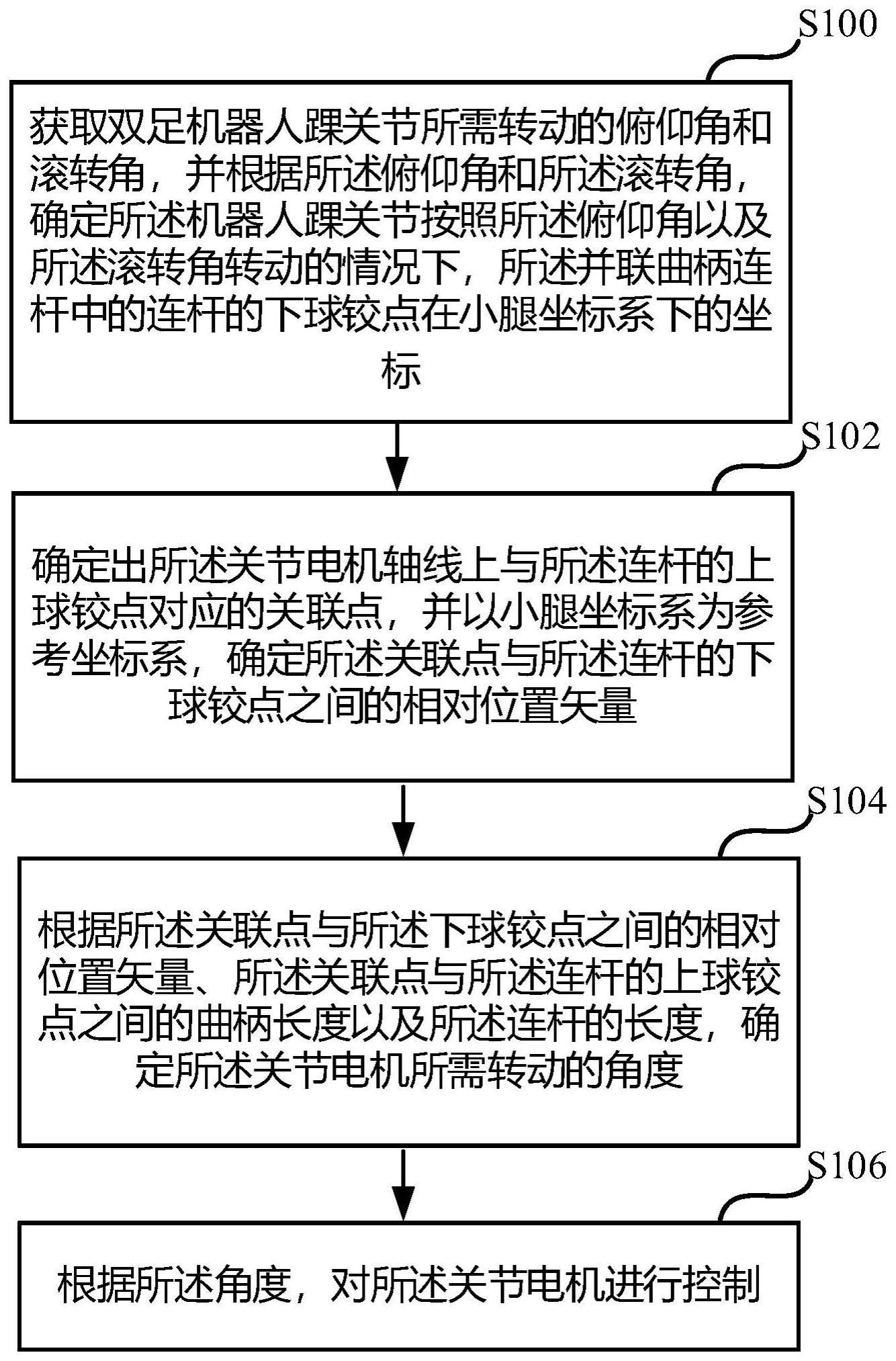
4、获取双足机器人踝关节转动所需的俯仰角和滚转角,并根据所述俯仰角和所述滚转角,确定所述机器人踝关节按照所述俯仰角以及所述滚转角转动的情况下,所述连杆的下球铰点在小腿坐标系下的坐标;
5、确定出所述关节电机轴线上与所述连杆的上球铰点对应的关联点,并以小腿坐标系为参考坐标系,确定所述关联点与所述连杆的下球铰点之间的相对位置矢量;
6、根据所述关联点与所述下球铰点之间的相对位置矢量、所述关联点与所述连杆的上球铰点之间的曲柄长度以及所述连杆的长度,确定所述关节电机所需转动的角度;
7、根据所述角度,对所述关节电机进行控制。
8、可选地,根据所述俯仰角和所述滚转角,确定所述机器人踝关节按照所述俯仰角以及所述滚转角转动的情况下,所述连杆的下球铰点在小腿坐标系下的坐标,具体包括:
9、根据所述俯仰角和所述滚转角,确定旋转矩阵,所述旋转矩阵用于表示双足机器人足部坐标系到小腿坐标系之间的坐标转换关系,所述足部坐标系随机器人足部的转动而转动;
10、根据所述旋转矩阵,将连杆的下球铰点坐标从足部坐标系变换至小腿坐标系。
11、可选地,确定出所述关节电机轴线上与所述连杆的上球铰点对应的关联点,具体包括:
12、确定出所述关节电机轴线上与所述连杆的上球铰点的y轴坐标一致的点,作为所述关联点。
13、可选地,根据所述关联点与所述下球铰点之间的相对位置矢量、所述关联点与所述上球铰点之间的曲柄长度以及所述连杆的长度,确定所述关节电机所需转动的角度,具体包括:
14、根据所述关联点与所述下球铰点之间的相对位置矢量中的z分量以及x分量,确定第一角度;
15、根据所述相对位置矢量、所述连杆的长度以及所述关联点与所述上球铰点之间的曲柄长度,确定第二角度;
16、根据所述第一角度与所述第二角度,确定所述关节电机所需转动的角度。
17、可选地,根据所述相对位置矢量、所述连杆的长度以及所述关联点与所述上球铰点之间的曲柄长度,确定第二角度,具体包括:
18、根据所述关联点与所述下球铰点之间的相对位置矢量中的z分量以及x分量,确定所述z分量与所述x分量所组成的斜边长度;
19、根据所述连杆的长度、所述相对位置矢量中的y分量,确定所述连杆对应的投影线段长度;
20、根据所述斜边长度、所述投影线段长度以及所述曲柄长度,确定所述第二角度。
21、可选地,根据所述角度,对所述关节电机进行控制,具体包括:
22、根据踝关节转动所需的俯仰角速度与滚转角速度,确定所述关节电机转动所需的角速度;
23、根据所述角度以及所述角速度,对所述关节电机进行控制。
24、本说明书提供了一种双足机器人踝关节控制的逆运动学求解装置,所述双足机器人踝关节通过并联曲柄连杆以及关节电机进行控制,包括:
25、坐标确定模块,用于获取机器人踝关节所需转动的俯仰角和滚转角,并根据所述俯仰角和所述滚转角,确定所述机器人踝关节按照所述俯仰角以及所述滚转角转动的情况下,所述并联曲柄连杆中的连杆下球铰点在小腿坐标系下的坐标;
26、矢量确定模块,用于确定出关节电机轴线上与所述连杆的上球铰点对应的关联点,并以小腿坐标系为参考坐标系,确定所述关联点与所述连杆下球铰点之间的相对位置矢量;
27、角度确定模块,用于根据所述关联点与所述下球铰点之间的相对位置矢量、所述关联点与所述连杆的上球铰点之间的曲柄长度以及所述连杆的长度,确定所述关节电机所需转动的角度;
28、控制模块,根据所述角度,对所述关节电机进行控制。
29、可选地,所述坐标确定模块,具体用于根据所述俯仰角和所述滚转角,确定旋转矩阵,所述旋转矩阵用于表示机器人足部坐标系到小腿坐标系之间的坐标转换关系,所述足部坐标系随机器人足部的转动而转动;根据所述旋转矩阵,将连杆的下球铰点坐标从足部坐标系变换至小腿坐标系。
30、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述双足机器人踝关节控制的逆运动学求解方法。
31、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述双足机器人踝关节控制的逆运动学求解方法。
32、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
33、从上述双足机器人踝关节控制的逆运动学求解方法中可以看出,可以获取双足机器人踝关节所需转动的俯仰角和滚转角,并根据俯仰角和滚转角,确定机器人踝关节按照俯仰角以及滚转角转动的情况下,并联曲柄连杆中的连杆的下球铰点在小腿坐标系下的坐标,而后,确定出关节电机轴线上与连杆的上球铰点对应的关联点,并以小腿坐标系为参考坐标系,确定关联点与连杆的下球铰点之间的相对位置矢量。进而,根据关联点与下球铰点之间的相对位置矢量、关联点与连杆的上球铰点之间的曲柄长度以及连杆的长度,确定关节电机所需转动的角度,根据角度,对关节电机进行控制。
34、从上述内容中可以看出,在计算该如何通过逆运动学求解的方式控制电机转动时,可以先确定出关联点,进而通过计算出该关联点与下球铰点之间的相对位置矢量,求解出电机所需转动的角度,在求解时除了该相对位置矢量以外,连杆的长度以及关联点和上球铰点之间的曲柄长度均是常量,因此,能够较为迅速地求出电机所需转动的角度,进而对电机进行控制。
技术特征:
1.一种双足机器人踝关节控制的逆运动学求解方法,所述双足机器人踝关节通过并联曲柄连杆以及关节电机进行控制,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,根据所述俯仰角和所述滚转角,确定所述机器人踝关节按照所述俯仰角以及所述滚转角转动的情况下,所述连杆的下球铰点在小腿坐标系下的坐标,具体包括:
3.如权利要求1所述的方法,其特征在于,确定出所述关节电机轴线上与所述连杆的上球铰点对应的关联点,具体包括:
4.如权利要求1所述的方法,其特征在于,根据所述关联点与所述下球铰点之间的相对位置矢量、所述关联点与所述连杆的上球铰点之间的曲柄长度以及所述连杆的长度,确定所述关节电机所需转动的角度,具体包括:
5.如权利要求4所述的方法,其特征在于,根据所述相对位置矢量、所述连杆的长度以及所述关联点与所述上球铰点之间的曲柄长度,确定第二角度,具体包括:
6.如权利要求1所述的方法,其特征在于,根据所述角度,对所述关节电机进行控制,具体包括:
7.一种双足机器人踝关节控制的逆运动学求解装置,所述双足机器人踝关节通过并联曲柄连杆以及关节电机进行控制,其特征在于,包括:
8.如权利要求7所述的装置,其特征在于,所述坐标确定模块,具体用于根据所述俯仰角和所述滚转角,确定旋转矩阵,所述旋转矩阵用于表示机器人足部坐标系到小腿坐标系之间的坐标转换关系,所述足部坐标系随机器人足部的转动而转动;根据所述旋转矩阵,将连杆的下球铰点坐标从足部坐标系变换至小腿坐标系。
9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~6任一项所述的方法。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1~6任一项所述的方法。
技术总结
本说明书公开了一种双足机器人踝关节控制的逆运动学求解方法及装置,该双足机器人通过并联曲柄连杆和关节电机控制,可以获取双足机器人踝关节转动所需的俯仰角与滚转角,并根据俯仰角与滚转角确定连杆的下球铰点在小腿坐标系下的坐标,以小腿坐标系为参考坐标系确定关联点与连杆的下球铰点之间的相对位置矢量;而后,可以根据该相对位置矢量、关联点与连杆的上球铰点之间的曲柄长度以及连杆长度,确定关节电机转动所需的角度;进一步根据踝关节转动所需的俯仰角速度与滚转角速度,确定关节电机转动所需的角速度;最终根据角度以及角速度,对关节电机进行控制。本方法能够通过几何关系较为迅速地求出关节电机所需转动的角度,进而对电机进行控制。
技术研发人员:汤铃铃,朱世强,谢安桓,梁定坤
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!