环境探索方法、大鼠机器人及存储介质
本发明涉及环境探索,尤其涉及一种环境探索方法、大鼠机器人及存储介质。
背景技术:
1、在大鼠机器人执行侦察、搜救等任务时,往往需要对未知环境进行探索,但是,在未知环境中,无法预知障碍物的位置使得大鼠机器人无法按照提前规划的路径运动,难以实现对未知环境的探索,探索效果较差。
技术实现思路
1、基于此,有必要针对现有技术的大鼠机器人对未知环境进行探索的效果较差技术问题,提出了一种环境探索方法、大鼠机器人及存储介质。
2、第一方面,提供了一种环境探索方法,所述方法包括:
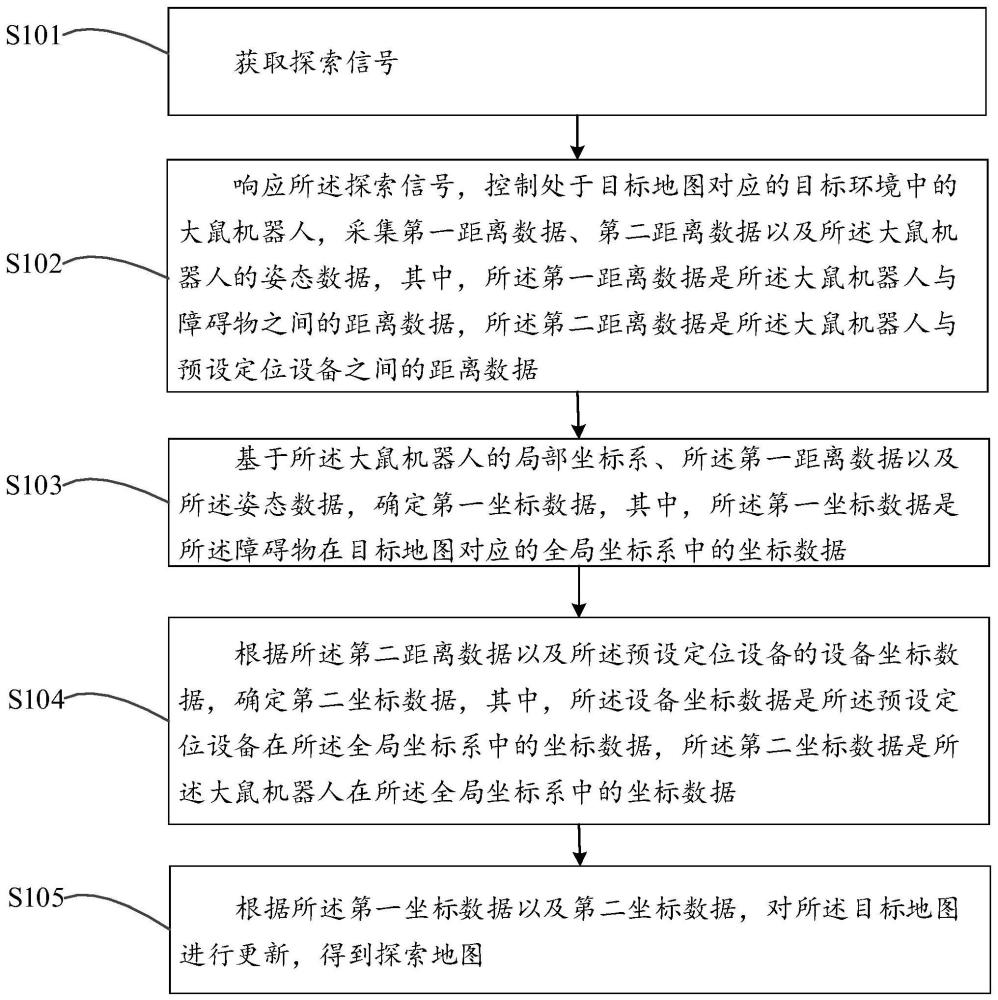
3、获取探索信号;
4、响应所述探索信号,控制处于目标地图对应的目标环境中的大鼠机器人,采集第一距离数据、第二距离数据以及所述大鼠机器人的姿态数据,其中,所述第一距离数据是所述大鼠机器人与障碍物之间的距离数据,所述第二距离数据是所述大鼠机器人与预设定位设备之间的距离数据;
5、基于所述大鼠机器人的局部坐标系、所述第一距离数据以及所述姿态数据,确定第一坐标数据,其中,所述第一坐标数据是所述障碍物在目标地图对应的全局坐标系中的坐标数据;
6、根据所述第二距离数据以及所述预设定位设备的设备坐标数据,确定第二坐标数据,其中,所述设备坐标数据是所述预设定位设备在所述全局坐标系中的坐标数据,所述第二坐标数据是所述大鼠机器人在所述全局坐标系中的坐标数据;
7、根据所述第一坐标数据以及第二坐标数据,对所述目标地图进行更新,得到探索地图。
8、第二方面,提供了一种大鼠机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述环境探索方法的步骤。
9、第三方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述环境探索方法的步骤。
10、本发明提出的环境探索方法,通过获取探索信号,响应所述探索信号,控制处于目标地图对应的目标环境中的大鼠机器人,采集第一距离数据、第二距离数据以及所述大鼠机器人的姿态数据,其中,所述第一距离数据是所述大鼠机器人与障碍物之间的距离数据,所述第二距离数据是所述大鼠机器人与预设定位设备之间的距离数据,接着基于所述大鼠机器人的局部坐标系、所述第一距离数据以及所述姿态数据,确定第一坐标数据,其中,所述第一坐标数据是所述障碍物在目标地图对应的全局坐标系中的坐标数据,从而根据所述第二距离数据以及所述预设定位设备的设备坐标数据,确定第二坐标数据,其中,所述设备坐标数据是所述预设定位设备在所述全局坐标系中的坐标数据,所述第二坐标数据是所述大鼠机器人在所述全局坐标系中的坐标数据,最后根据所述第一坐标数据以及第二坐标数据,对所述目标地图进行更新,得到探索地图。能够通过第一距离数据、第二距离数据以及姿态数据,完整且准确地对目标地图进行探索,得到探索地图,实现了对未知环境的有效探索,可广泛应用于侦察、勘探等领域。
技术特征:
1.一种环境探索方法,其特征在于,应用于大鼠机器人,所述大鼠机器人包括大鼠本体、电子背包,所述电子背包包括处理器、激光测距模块、imu模块、uwb模块、通讯模块、电刺激模块,所述处理器与激光测距模块、imu模块、uwb模块、电刺激模块以及通讯模块电连接;
2.根据权利要求1所述的环境探索方法,其特征在于,所述基于所述大鼠机器人的局部坐标系、所述第一距离数据以及所述姿态数据,确定第一坐标数据的步骤,包括:
3.根据权利要求2所述的环境探索方法,其特征在于,所述根据所述第三坐标数据以及所述姿态数据进行坐标数据转换,得到所述第一坐标数据的步骤,包括:
4.根据权利要求1所述的环境探索方法,其特征在于,所述根据所述第一坐标数据以及所述第二坐标数据,对所述目标地图进行更新,得到探索地图的步骤,包括:
5.根据权利要求4所述的环境探索方法,其特征在于,所述根据所述第一坐标数据以及所述第二坐标数据,确定已探索区域的步骤,包括:
6.根据权利要求4所述的环境探索方法,其特征在于,所述基于所述更新地图以及所述已探索区域,确定所述探索地图的步骤,包括:
7.根据权利要求6所述的环境探索方法,其特征在于,所述判断所述更新地图中是否存在未探索区域的步骤之后,还包括:
8.一种大鼠机器人,其特征在于,所述大鼠机器人包括大鼠本体、电子背包,所述电子背包包括处理器、激光测距模块、imu模块、uwb模块、通讯模块、电刺激模块、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器与激光测距模块、imu模块、uwb模块、通讯模块、电刺激模块电连接;
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述环境探索方法的步骤。
技术总结
本申请涉及环境探索技术领域,揭示了一种环境探索方法、大鼠机器人及存储介质,所述方法包括:控制处于目标地图对应的目标环境中的大鼠机器人,采集第一距离数据、第二距离数据以及所述大鼠机器人的姿态数据;基于所述大鼠机器人的局部坐标系、所述第一距离数据以及所述姿态数据,确定第一坐标数据;根据所述第二距离数据以及所述预设定位设备的设备坐标数据,确定第二坐标数据;根据所述第一坐标数据以及第二坐标数据,对所述目标地图进行更新,得到探索地图,能够通过第一距离数据、第二距离数据以及姿态数据,完整且准确地对目标地图进行探索,得到探索地图,实现了对未知环境的有效探索,可广泛应用于侦察、勘探等领域。
技术研发人员:杨灿军,谢昊博,徐浩泽,许科帝,杨巍
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!