一种移动机器人的脱困方法与流程
本技术属于机器人路径规划,具体涉及一种移动机器人的脱困方法。
背景技术:
1、移动机器人比如清洁机器人在移动过程中,受到自身越障性能和行驶环境的影响,容易出现被困的情况。
2、但目前的移动机器人在检测到被困后,通常会选择一系列的动作、速度搭配操作使机器人恢复正常的运动状态,但此时更多的是控制机器人回到之前可以正常运动的位置,或者通过后退动作实现,同时,为了防止机器人反复进入被困的场景,还会采用设置禁区的方式,此时就有可能会将通往目标点的唯一路径堵死,造成目标点不可达。也即,目前的机器人脱困方案更多的是关注脱困的成功率,而忽略脱困的方向,这就使得机器人即使能够成功脱困,也无法较好的衔接后续运动指令执行清洁任务,就会严重影响机器人的清洁效率。
技术实现思路
1、本技术提供了一种移动机器人的脱困方法,以解决上述技术问题中的至少一个。
2、本技术所采用的技术方案为:
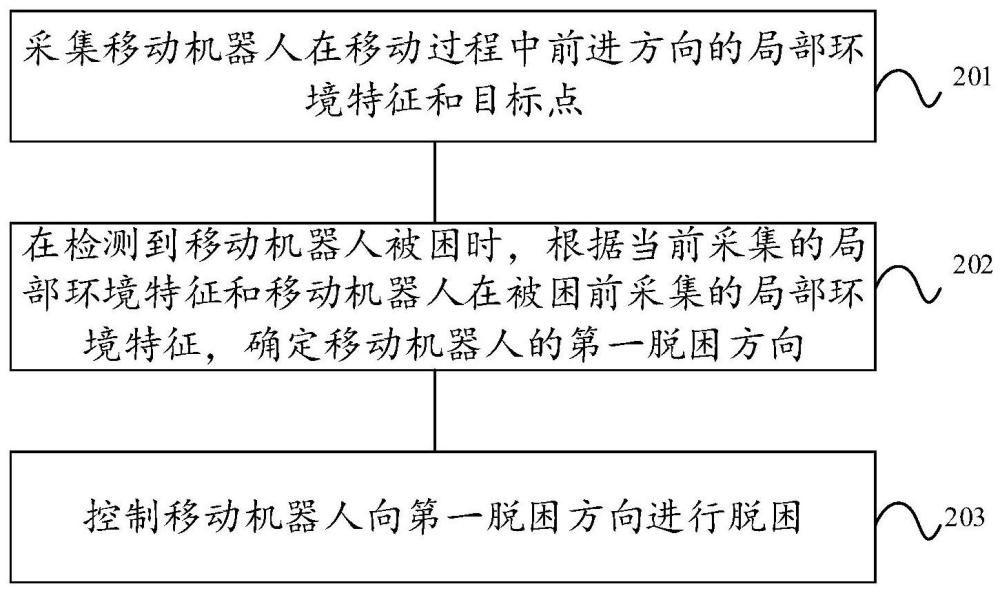
3、一种移动机器人的脱困方法,所述方法包括:采集移动机器人在移动过程中前进方向的局部环境特征和目标点;在检测到移动机器人被困时,根据当前采集的所述局部环境特征和所述移动机器人在被困前采集的所述局部环境特征,确定所述移动机器人的第一脱困方向,所述第一脱困方向指向所述移动机器人在被困前采集的目标点;控制所述移动机器人向所述第一脱困方向进行脱困。
4、在本技术说明书的一种可能实现方式中,所述采集移动机器人在移动过程中前进方向的局部环境特征,包括:控制所述移动机器人在移动过程中以预设时间间隔采集前进方向的局部地图特征和/或红外信号特征和/或语义图像特征,所述局部地图特征至少包括角点特征以及线段特征。
5、在本技术说明书的一种可能实现方式中,所述采集移动机器人在移动过程中前进方向的目标点,包括:在移动过程中获取所述移动机器人当前前进方向的局部环境特征以及所述移动机器人的当前位置点;根据所述当前前进方向的局部环境特征确定所述移动机器人当前前进方向上的障碍物点;根据所述障碍物点和所述当前位置点确定所述移动机器人当前的目标点。
6、在本技术说明书的一种可能实现方式中,所述根据所述障碍物点和所述当前位置点确定所述移动机器人当前的目标点,包括:确定所述障碍物点和所述当前位置点间的最小距离;在所述最小距离大于或等于第一预设距离时,确定并记录所述当前位置点前进方向的第一预设距离处为目标点;在所述最小距离小于所述第一预设距离时,确定并记录所述当前位置点前进方向的第二预设距离处为目标点,所述第二预设距离为所述最小距离减去所述移动机器人的机身半径。
7、在本技术说明书的一种可能实现方式中,所述根据当前采集的所述局部环境特征和所述移动机器人在被困前采集的所述局部环境特征,确定所述移动机器人的第一脱困方向,包括:将当前采集的所述局部环境特征和所述移动机器人在被困前采集的所述局部环境特征进行特征匹配;根据特征匹配结果,确定所述移动机器人在被困前采集的目标点在当前采集的所述局部环境特征中的位置;将所述移动机器人在被困前采集的目标点在当前采集的所述局部环境特征中的位置所在的方向确定为所述第一脱困方向。
8、在本技术说明书的一种可能实现方式中,所述控制所述移动机器人向所述第一脱困方向进行脱困,包括:若所述第一脱困方向指向所述移动机器人的第一前进区域,则控制所述移动机器人执行第一脱困方案,所述第一前进区域为所述移动机器人的前进方向为中心线向左向右扩展出的90度区域;若所述第一脱困方向指向所述移动机器人的第二前进区域,则控制所述移动机器人执行第二脱困方案,所述第二前进区域为所述第一前进区域顺时针转动270度经过的区域。
9、在本技术说明书的一种可能实现方式中,所述若所述第一脱困方向指向所述移动机器人的第二前进区域,则控制所述移动机器人执行第二脱困方案,包括:控制所述移动机器人执行第一脱困动作,以使所述第一脱困方向指向所述移动机器人的第一前进区域,所述第一脱困动作至少包括原地旋转;若所述第一脱困动作执行失败,则控制所述移动机器人执行第二脱困动作,以使所述第一脱困方向指向所述移动机器人的第一前进区域,所述第二脱困动作至少包括先后退再原地旋转和/或先前进再原地旋转;在所述第一脱困动作或者所述第二脱困动作执行成功后,控制所述移动机器人执行第一脱困方案。
10、在本技术说明书的一种可能实现方式中,所述控制所述移动机器人执行第一脱困方案,包括:控制所述移动机器人向所述第一脱困方向执行第三脱困动作,所述第三脱困动作至少包括加速前冲;若所述移动机器人执行所述第三脱困动作后脱困失败,则控制所述移动机器人执行第四脱困动作,所述第四脱困动作至少包括先后退再加速前冲;若所述移动机器人执行所述第四脱困动作后脱困失败,则控制所述移动机器人执行第五脱困动作,所述第五脱困动作至少包括先后退再向左前方进行弧线运动和/或先后退再向右前方进行弧线运动。
11、在本技术说明书的一种可能实现方式中,所述移动机器人执行第五脱困动作中的向左前方进行弧线运动与向右前方进行弧线运动时,所述弧线运动对应的圆心角与右弧线对应的圆心角角度相等,取值为30-45度。
12、在本技术说明书的一种可能实现方式中,若所述移动机器人向所述第一脱困方向进行脱困失败,所述方法还包括:以所述移动机器人为中心点,以所述第一脱困方向所在直线为中心线,向左向右分别扩展预设角度,构建左右目标区域;将包含障碍物特征少的目标区域的中心线所在方向,确定为第二脱困方向;控制所述移动机器人向所述第二脱困方向进行脱困;若所述移动机器人向所述第二脱困方向进行脱困失败,控制所述移动机器人向任意方向进行脱困。
13、由于采用了上述技术方案,本技术所取得的有益效果为:
14、1.本技术在检测到移动机器人被困后,通过机器人在移动过程中采集的局部环境特征与目标点确定出第一脱困方向,并控制机器人向第一脱困方向进行脱困,以此实现在机器人脱困时考虑方向因素,便于机器人在成功脱困后能够快速衔接后续的运动动作执行清洁任务,从而提高机器人的清洁效率。
15、2.本技术中的移动机器人在向第一脱困方向脱困失败后,通过局部环境特征中包含的障碍物特征多少,确定出第一脱困方向周围更空旷的第二脱困方向,并控制移动机器人向第二脱困方向进行脱困,从而提高移动机器人脱困的成功率,并且,向第二脱困方向成功脱困后在一定程度上也能使移动机器人高效的衔接后续动作,提高机器人的清洁效率。
16、3.本技术中的移动机器人如若向前述第二脱困方向也脱困失败,则不会再考虑方向因素,而是可以向任意方向进行脱困,以保证移动机器人成功脱困。
17、4.本技术中的移动机器人向第一脱困方向进行脱困时,执行的脱困动作至少包括加速前冲动作、先后退再加速前冲动作和左右扭摆前进动作等,执行这些脱困动作可以使移动机器人朝向第一脱困方向运动,也即朝向目标点所在的方向运动,也就能够保证在机器人成功脱困后快速衔接后续运动动作向目标点前进,从而避免移动机器人由于向其他方向运动而造成的反复进入被困区域的情况。
- 还没有人留言评论。精彩留言会获得点赞!