一种油气管线位置与无人机巡检航线自动匹配方法、电子设备及存储介质与流程
本发明属于油气管线智能化安全管理领域,具体涉及一种油气管线位置与无人机巡检航线自动匹配方法、电子设备及存储介质。
背景技术:
1、在油气输送过程中,需要采用无人机对油气管线进行巡检作业的同时,进行基于实时视频的人工智能分析,及时、精准、主动对油气输送管线及附近地面出现的泄漏点、违建、占压管线等情况。无人机执行的巡检航线虽然通过北斗差分定位技术可以大幅度提高定位精度,但由于多路径效应、环境噪声等对定位接收机影响的非对称性,使得定位的精确性、持续性和可靠性受到不同程度的影响。只有保证航线与地埋管道位置的精准匹配才能提高异常情况发生位置的准确推送和显示,同时可进行巡检航线及监测航点的自动生成算法的实现。
技术实现思路
1、本发明要解决的问题是提高无人机对油气管线定位的精确性,提出一种油气管线位置与无人机巡检航线自动匹配方法、电子设备及存储介质
2、为实现上述目的,本发明通过以下技术方案实现:
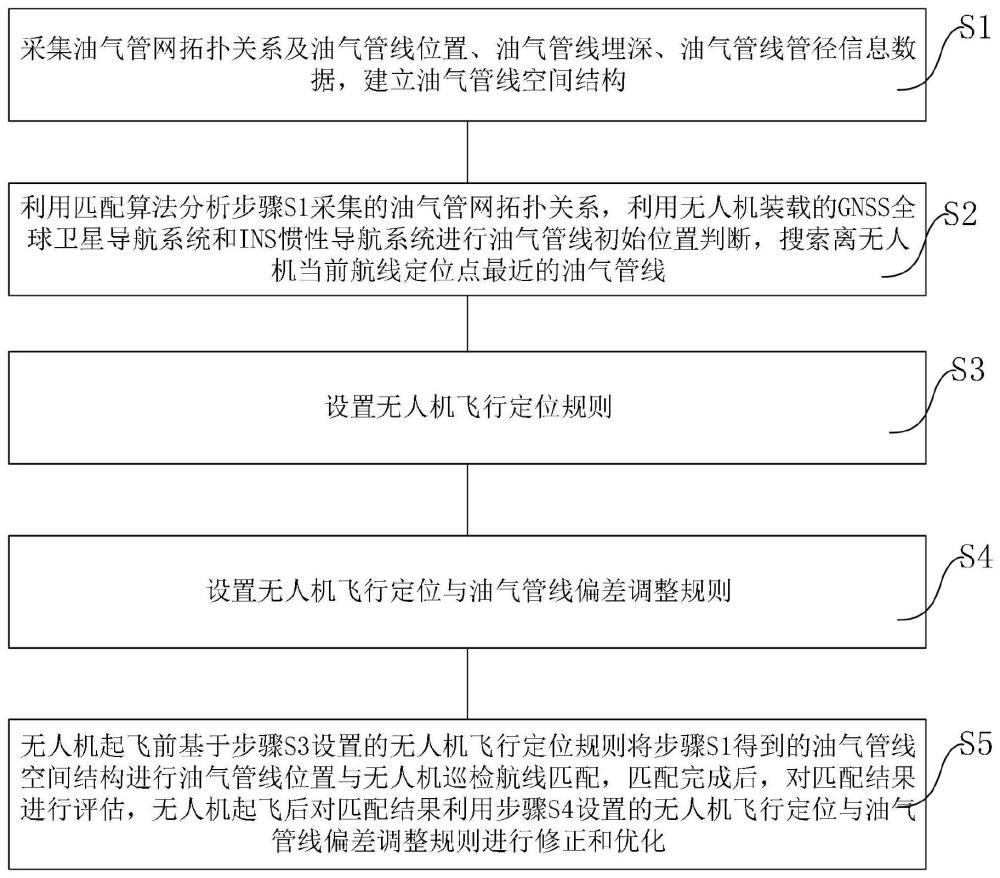
3、一种油气管线位置与无人机巡检航线自动匹配方法,包括如下步骤:
4、s1.采集油气管网拓扑关系及油气管线位置、油气管线埋深、油气管线管径信息数据,建立油气管线空间结构;
5、s2.利用匹配算法分析步骤s1采集的油气管网拓扑关系,利用无人机装载的gnss全球卫星导航系统和ins惯性导航系统进行油气管线初始位置判断,搜索离无人机当前航线定位点最近的油气管线;
6、s3.设置无人机飞行定位规则;
7、s4.设置无人机飞行定位与油气管线偏差调整规则;
8、s5.无人机起飞前基于步骤s3设置的无人机飞行定位规则将步骤s1得到的油气管线空间结构进行油气管线位置与无人机巡检航线匹配,匹配完成后,对匹配结果进行评估,无人机起飞后对匹配结果利用步骤s4设置的无人机飞行定位与油气管线偏差调整规则进行修正和优化。
9、进一步的,步骤s1的数据采集于油气输送管网gis数据库。
10、进一步的,步骤s3的具体实现方法包括如下步骤:
11、s3.1.判断北斗数据精度是否正常,判断为北斗数据精度正常时,直接投影获得当前无人机巡检的油气管线,判断为北斗数据精度异常,则进行下一步;
12、s3.2.对于北斗数据精度异常的情况,设置△cdistance为北斗值与当前油气管线投影点之间的距离,△distance为北斗值与其他油气管线投影点之间的距离,maxd为预先设定的搜寻油气管线的距离阈值,依据统计理论,设定误差椭圆的计算表达式为:
13、
14、其中,σx和σy分别为北斗东向和北向测量误差的标准差,σx2和σy2分别为北斗东向和北向测量误差的协方差,a和b分别为误差椭圆的长轴、短轴,σ0为单位权值的后验方差;
15、假设测量误差服从标准正态分布,从北斗接收机的输出获得方差和协方差,取mard=max(a,b)并参考油气管线占地宽度加以修正。
16、进一步的,步骤s3.1设置pdop为卫星分布的空间几何强度因子,maparea为预先设定的无人机巡检的地理区域理论范围,pos(l,b)为车载北斗定位数据,pos(v)为无人机巡检速度,uav speed为预先设定的无人机巡检的最大理论值,判断无人机的北斗数据精度是否正常的规则为:
17、规则1、对无人机数据进行判断,如果pdop>6,则北斗数据异常,转规则5;
18、规则2、对无人机数据进行判断,如果pos(l,b)不在maparea范围内,则北斗数据异常,转规则5;
19、规则3、对无人机数据进行判断,如果pos(v)>uav speed,则北斗数据异常,转规则5;
20、规则4、对无人机数据进行判断,如果pos(v)<uav speed,则北斗数据异常,转规则5;
21、规则5、对无人机数据进行判断,如果无人机在隧道或立交桥,则北斗数据异常,则启动全球定位系统航位推算定位数据获取定位数据。
22、进一步的,步骤s4的具体实现方法包括如下步骤:
23、s4.1.对无人机连续飞行过程中定位点建立曲线函数,然后与无人机规划航线进行拟合,判断无人机定位与油气管线是否出现偏差,判断为是,则进行下一步,按照无人机飞行定位与油气管线偏差调整规则对无人机飞行定位与油气管线偏差调整;
24、s4.2.设置无人机飞行定位与油气管线偏差调整规则:
25、s4.2.1.将接收到油气管线位置的标定信息为规划好的航线或者用户自定义管线属性类型代码时,将油气管线位置的标定信息匹配到规划的油气管线上;
26、s4.2.2.对步骤s4.2.1匹配好的规划的油气管线,进行无人机飞行定位搜索,判断无人机飞行定位范围中油气管线的数量,基于无人机飞行定位范围中油气管线的数量设置无人机飞行定位与油气管线偏差调整规则;
27、规则a、基于无人机飞行定位范围中油气管线的数量<1,则判断无人机不在油气管线上,利用概率统计算法,根据北斗的实时定位数据建立缓冲区替代误差椭圆,并利用误差椭圆扩展因子的原理,设置缓冲区扩展比例因子,设置缓冲区半径按1m,5m,10m和15m四个等级由小到大逐级搜索落入缓冲区内的管线路段;
28、规则b、基于无人机飞行定位范围中油气管线的数量=1,利用直接投影算法将油气管线作为无人机巡检的当前管线;
29、规则c、基于无人机飞行定位范围中油气管线的数量>1且具有相同的油气管线节点号,则判断无人机巡检在油气管线转折位置,计算无人机巡检轨迹与候选油气管网位置数据的相关性系数,提取相关性系数最高的候选油气管网为无人机巡检的真实油气管线位置;
30、规则d、基于无人机飞行定位范围中油气管线的数量>1且不具有相同的油气管线节点号,则判断无人机巡检在距离较近的平行候选油气管线之间,采用模糊逻辑算法中的利用距离和方向要素的线性组合方法,确定权向量p=[p1,p2],其中p1,p2分别表示因素x,y在乱中的重要程度,令p1+p2=1,并对p2参照模糊逻辑算法模式中的确定相似性度量函数的加权因子q的模糊判决规则确定其值,然后计算基于曲线拟合的候选油气管网位置匹配算法的相似性度量函数s,并选取最小值作为待匹配管线位置点,得到候选油气管为无人机巡检的真实油气管线位置。
31、进一步的,步骤s5中基于油气管线走向、长度因素,确定最佳的匹配结果,匹配完成后,将匹配结果进行评估,判断匹配的准确性,并对匹配结果进行修正和优化。
32、一种电子设备,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时实现所述的一种油气管线位置与无人机巡检航线自动匹配方法的步骤。
33、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的一种油气管线位置与无人机巡检航线自动匹配方法。
34、本发明的有益效果:
35、本发明所述的一种油气管线位置与无人机巡检航线自动匹配方法,依据曲线匹配的思想在无人机航迹的邻近区内搜寻全部油气管线路段及其组合,把组合航线分别与无人机航迹求取匹配度量值,将取得最佳匹配度量值的组合航线作为无人机当前巡检航线,本发明实现了油气管线位置与无人机巡检航线的精确匹配。
- 还没有人留言评论。精彩留言会获得点赞!