一种无人艇航行控制软件架构方法及装置与流程
本发明涉及智能船艇控制,具体涉及一种无人艇航行控制软件架构方法及装置。
背景技术:
1、随着近年来船艇向着无人驾驶,智能驾驶方向的快速发展,在无人艇上会装备越来越多的辅助设备来增强功能,提高安全性。导致无人艇的航行控制软件需要控制的设备越来越多,需要融合的信息越来越多,编写的软件越来越复杂。
技术实现思路
1、本发明实施例提供了一种无人艇航行控制软件架构方法及装置,以此解决背景技术中所提出的问题。
2、鉴于上述问题,本发明提出的技术方案是:
3、一种无人艇航行控制软件架构方法,包括:
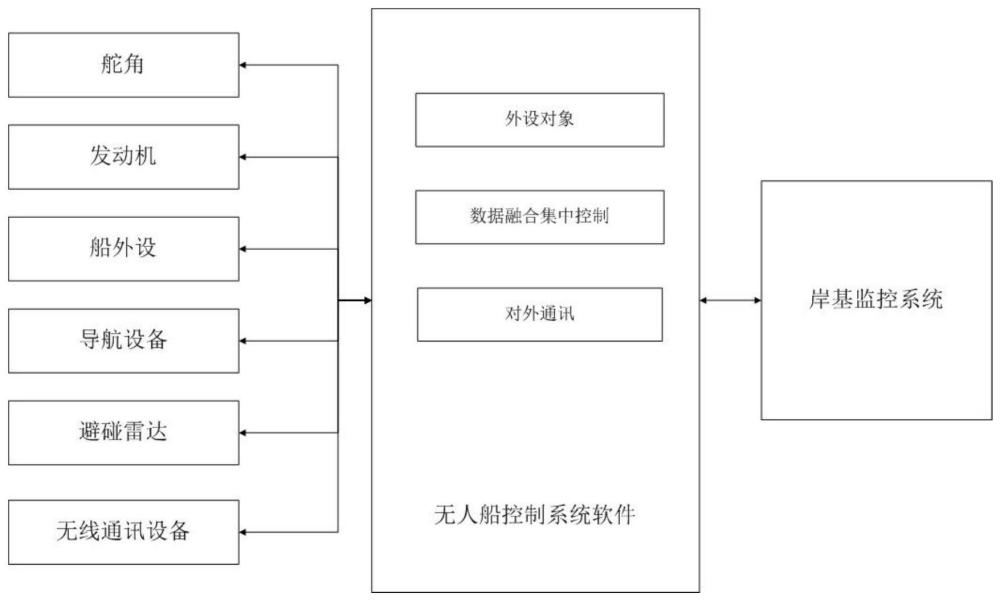
4、外围设备、无人船控制系统软件和岸基监控系统,所述外围设备包括舵角、发动机、船外设、导航设备、避碰雷达、无线通讯设备,所述无人船控制系统软件包括外设对象、数据融合集中控制和对外通讯,所述岸基监控系统与无人船控制系统软件之间通过网络连接,所述无人船控制系统软件与外围设备之间通过网络连接。
5、作为本发明的一种优选技术方案,包括以下步骤:
6、s1,分类:把每一个外围设备都抽象成一个类,包括舵角控制类、发动机类、导航设备类、避碰雷达类、避碰雷达组类、无线设备类和外设控制类,其中每类均包括接口、数据处理、流程控制和错误处理,
7、a、接口用于对设备的打开关闭操作,用于对设备的控制输入和反馈,用于设备的报警信息;
8、b、数据处理,用于通讯协议的解析,用于把收到的数据转换成控制设备的电流、电压和控制信号;
9、c、流程控制,用于设备的初始化控制流程,用于设备的闭环控制流程;
10、d、错误处理,用于设备出现错误时的处理过程;
11、s2、数据融合集中控制和对外通讯:打开软件后,启用一个线程对所有的设备依次调用打开设备的接口,返回每个设备的状态,启动完成后,根据需要打开多个定时器,用于调用设备类数据反馈接口和故障报警接口,获取设备的数据和状态,启动完成后,开启一个定时器,用于接收岸基监控系统的控制指令,用于调用设备类的控制接口控制设备的运行,启动完成后,开启一个定时器,对s1中b步骤获取设备的数据和状态进行数据融合,用于向岸基监控系统发送。
12、作为本发明的一种优选技术方案,所述舵角控制类的接口包括打开舵角控制、关闭舵角控制、控制角度输入、真实角度反馈、故障报警和故障清除,所述舵角控制类的数据处理为控制角度转成开关控制,所述舵角控制类的流程控制包括初始化和角度闭环控制流程,所述舵角控制类的错误处理为紧急停止。
13、作为本发明的一种优选技术方案,所述发动机类的接口包括发开发动机、关闭发动机、急停、档位控制、油门控制、自动巡航速度控制、速度反馈、发动机数据反馈、故障报警和故障清除,所述发动机类的数据处理包括can接口解析发动机协议、控制档位油门转成电压控制和控制巡航速度转成电压控制,所述发动机类的流程控制包括初始化、档位油门闭环控制流程和速度闭环控制流程,所述发动机类的错误处理为紧急停止。
14、作为本发明的一种优选技术方案,所述导航设备类的接口包括打开导航设备、关闭导航设备、位置反馈、速度反馈、方向反馈、海图路径规划、位置、速度控制、故障报警和故障清除,所述导航设备类的数据处理包括can接口解析导航设备协议、位置、速度控制转成档位、油门和舵角控制,所述导航设备类的流程控制包括初始化和位置、速度闭环控制流程,所述导航设备类的错误处理为紧急停止。
15、作为本发明的一种优选技术方案,所述避碰雷达类接口包括打开雷达、关闭雷达、读取雷达数据、故障报警和故障清除,所述避碰雷达类数据处理为雷达数据协议,所述避碰雷达类流程控制为初始化,所述避碰雷达类的错误处理为重启雷达。
16、作为本发明的一种优选技术方案,所述避碰雷达组类的接口包括打开所有雷达、关闭所有雷达、反馈障碍物信息、故障报警和故障清除,所述避碰雷达组类的数据处理为雷达数据转化成障碍物信息,所述避碰雷达组类的流程控制为初始化,所述避碰雷达组类的错处处理为重启雷达。
17、作为本发明的一种优选技术方案,所述无线设备类的接口包括打开无线设备、关闭无线设备、读取无线设备状态、故障报警和故障清除,所述无线设备类的数据处理包括发送通讯协议和接收通讯协议,所述无线设备类的流程控制为初始化,所述无线设备类的错误处理为重启无线设备。
18、作为本发明的一种优选技术方案,所述外设控制类的接口包括打开外设控制、关闭外设控制、控制外设开关、外设开关反馈、故障报警和故障清除,所述外设控制类的数据处理为外设开关控制,所述外设控制类的流程控制包括初始化和开关闭环控制流程,所述外设控制类的错误处理为紧急停止全部关闭。
19、另一方面,本发明提供一种无人艇航行控制装置,包括控制器本体,所述控制器本体的一侧安装有触控显示屏,所述无人船控制系统软件安装于控制器本体的内部。
20、相对于现有技术而言,本发明的有益效果是:无人船控制系统软件接收岸基监控系统指令,控制外围设备工作,可以实现岸基遥控驾驶或自动无人驾驶,打开软件后,启用一个线程对所有的设备依次调用打开设备的接口,返回每个设备的状态,启动完成后,根据需要打开多个定时器,用于调用设备类数据反馈接口和故障报警接口,获取设备的数据和状态,启动完成后,开启一个定时器,用于接收岸基监控系统的控制指令,用于调用设备类的控制接口控制设备的运行,启动完成后,开启一个定时器,获取设备的数据和状态进行数据融合,用于向岸基监控系统发送,舵角控制类是舵角控制器抽象出来的类,可以接收到角度控制指令后,启动角度闭环控制流程,把舵角控制转换成开关量控制,调整真实舵角达到预期,发动机类是发动机抽象出来的类,可以接收指令控制档位和油门,也支持自动巡航速度控制,收到指令后启动相应闭环控制流程,把档位和油门控制转成电压控制,调制真实档位和油门达到预期,导航设备类是导航设备抽象出来的类,可以接收海图路径规划,支持位置和速度的控制,收到指令后把路径规划拆分成一个个独立的位置点,启动位置、速度闭环控制流程,把对位置和速度的控制转换成对档位、油门和舵角的控制,调整位置和速度达到预期,避碰雷达类是避碰雷达设备抽象出来的类,可以感知周围障碍物个数,把多个避碰雷达类组合成避碰雷达组类,可以把多个避碰雷达的数据统一处理,形成无人艇周围障碍物信息,收到指令后反馈障碍物信息和雷达状态信息,无线设备类是无线通讯设备抽象出来的类,可以完成与岸基监控系统的通讯功能,外设控制类是用来控制外部设备打开关闭的类,收到指令后,可以控制船的外部设备上电或断电,外部设备包括:灯光、电笛、空调、娱乐设备等。
21、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种无人艇航行控制软件架构方法,其特征在于,包括:
2.根据权利要求1所述的一种无人艇航行控制软件架构方法,其特征在于:包括以下步骤:
3.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述舵角控制类的接口包括打开舵角控制、关闭舵角控制、控制角度输入、真实角度反馈、故障报警和故障清除,所述舵角控制类的数据处理为控制角度转成开关控制,所述舵角控制类的流程控制包括初始化和角度闭环控制流程,所述舵角控制类的错误处理为紧急停止。
4.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述发动机类的接口包括发开发动机、关闭发动机、急停、档位控制、油门控制、自动巡航速度控制、速度反馈、发动机数据反馈、故障报警和故障清除,所述发动机类的数据处理包括can接口解析发动机协议、控制档位油门转成电压控制和控制巡航速度转成电压控制,所述发动机类的流程控制包括初始化、档位油门闭环控制流程和速度闭环控制流程,所述发动机类的错误处理为紧急停止。
5.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述导航设备类的接口包括打开导航设备、关闭导航设备、位置反馈、速度反馈、方向反馈、海图路径规划、位置、速度控制、故障报警和故障清除,所述导航设备类的数据处理包括can接口解析导航设备协议、位置、速度控制转成档位、油门和舵角控制,所述导航设备类的流程控制包括初始化和位置、速度闭环控制流程,所述导航设备类的错误处理为紧急停止。
6.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述避碰雷达类接口包括打开雷达、关闭雷达、读取雷达数据、故障报警和故障清除,所述避碰雷达类数据处理为雷达数据协议,所述避碰雷达类流程控制为初始化,所述避碰雷达类的错误处理为重启雷达。
7.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述避碰雷达组类的接口包括打开所有雷达、关闭所有雷达、反馈障碍物信息、故障报警和故障清除,所述避碰雷达组类的数据处理为雷达数据转化成障碍物信息,所述避碰雷达组类的流程控制为初始化,所述避碰雷达组类的错处处理为重启雷达。
8.根据权利要求2所述的一种无人艇航行控制软件架构方法,其特征在于:所述无线设备类的接口包括打开无线设备、关闭无线设备、读取无线设备状态、故障报警和故障清除,所述无线设备类的数据处理包括发送通讯协议和接收通讯协议,所述无线设备类的流程控制为初始化,所述无线设备类的错误处理为重启无线设备。
9.根据权利要求1所述的一种无人艇航行控制软件架构方法,其特征在于:所述外设控制类的接口包括打开外设控制、关闭外设控制、控制外设开关、外设开关反馈、故障报警和故障清除,所述外设控制类的数据处理为外设开关控制,所述外设控制类的流程控制包括初始化和开关闭环控制流程,所述外设控制类的错误处理为紧急停止全部关闭。
10.一种应用于权利要求1~9任一项所述的一种无人艇航行控制装置,其特征在于,包括控制器本体(1001),所述控制器本体(1001)的一侧安装有触控显示屏(1002),所述无人船控制系统软件安装于控制器本体(1001)的内部。
技术总结
本发明提供了一种无人艇航行控制软件架构方法及装置,包括外围设备、无人船控制系统软件和岸基监控系统,所述外围设备包括舵角、发动机、船外设、导航设备、避碰雷达、无线通讯设备,所述无人船控制系统软件包括外设对象、数据融合集中控制和对外通讯,所述岸基监控系统与无人船控制系统软件之间通过网络连接,所述无人船控制系统软件与外围设备之间通过网络连接,本发明,把每一个外设对象都抽象成了一个类,每个类中实现了接口、数据处理、流程控制和错误处理,其中的流程控制都设计成闭环控制,在无人艇航行控制软件中进行数据融合和集中控制,具有较高的实用价值。
技术研发人员:梁晓江,张天江,周博,郭大权
受保护的技术使用者:天津龙舟智控科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!