一种流程调度方法、装置、设备及存储介质与流程
本说明书涉及生产调度,尤其是涉及一种流程调度方法、装置、设备及存储介质。
背景技术:
1、作业车间调度问题(job-shop scheduling problem,jssp)用于指导作业车间生产工作,是一种具有复杂组合优化特性的问题,作业车间生产调度常常在工艺流程与设备资源的双重约束下受限,工艺流程中随时可能出现的突发状况和动态变化的工艺流程对作业车间生产调度也产生较大影响,现有的固定化生产调度流程已不再满足当前的生产调度需求,难以充分利用仪器设备等资源。
技术实现思路
1、鉴于目前固定化生产调度流程已不再满足当前的生产调度需求,难以充分利用仪器设备等调度资源,提出了本方案以便克服上述问题或者至少部分地解决上述问题。
2、一方面,本说明书的一些实施例的目的在于提供一种流程调度方法,所述方法包括:
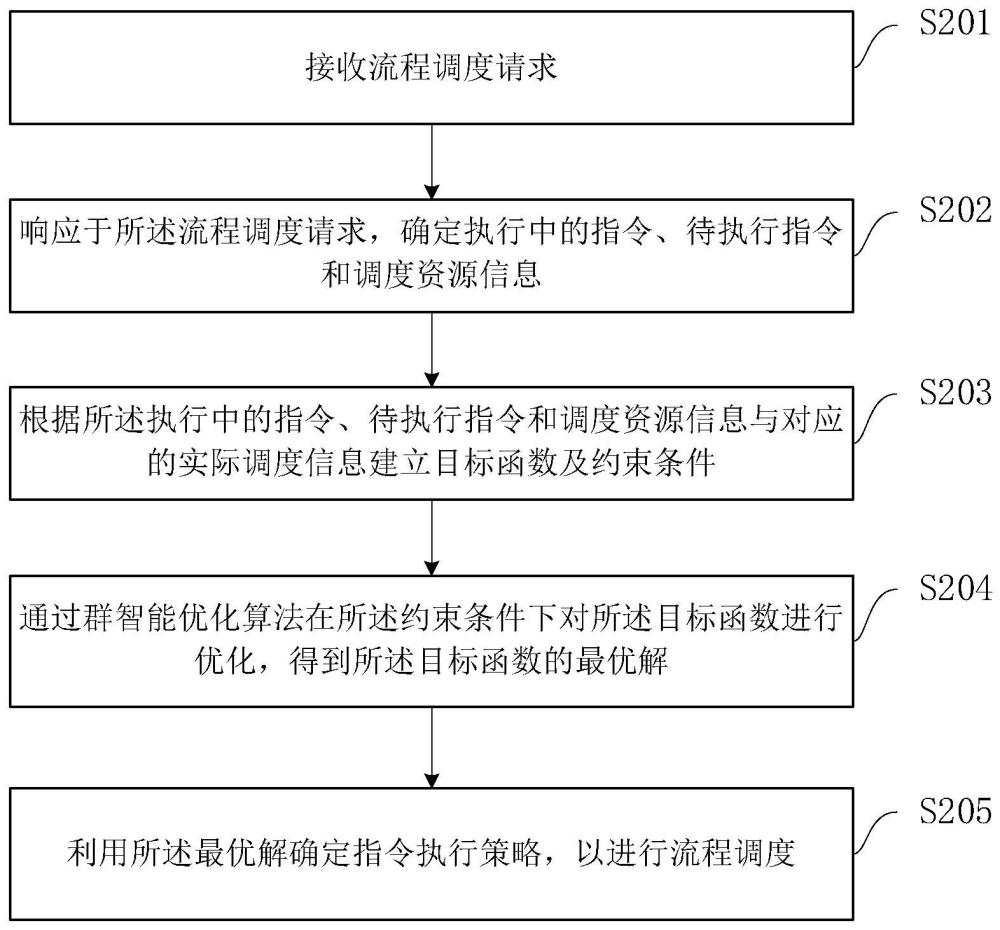
3、接收流程调度请求;
4、响应于所述流程调度请求,确定执行中的指令、待执行指令和调度资源信息;
5、根据所述执行中的指令、待执行指令和调度资源信息与对应的实际调度信息建立目标函数及约束条件;
6、通过群智能优化算法在所述约束条件下对所述目标函数进行优化,得到所述目标函数的最优解;
7、利用所述最优解确定指令执行策略,以进行流程调度。
8、进一步地,根据所述执行中的指令、待执行指令和调度资源信息与对应的实际调度信息建立目标函数及约束条件,包括:
9、根据所述执行中的指令和待执行指令建立有向无环图;
10、遍历所述有向无环图中的节点,得到满足各节点之间的优先级关系和依赖关系的节点列表;
11、根据所述有向无环图中各节点之间的优先级关系和依赖关系,以及完成各节点所需的最短时间和最少调度资源,得到所述约束条件;
12、根据所述约束条件及所述节点列表的实际调度信息,建立所述目标函数。
13、进一步地,根据所述执行中的指令和待执行指令建立有向无环图,包括:
14、将所述执行中的指令作为有向无环图的起点,确定所述起点与所述待执行指令之间的起点依赖关系;
15、确定所述待执行指令之间的中间优先级关系和中间依赖关系;
16、根据所述起点依赖关系、中间优先级关系和中间依赖关系,建立所述有向无环图。
17、进一步地,根据所述执行中的指令和待执行指令建立有向无环图,进一步包括:
18、根据所述中间优先级关系和中间依赖关系,确定具有不存在优先级关系和依赖关系的同级待执行指令;
19、利用占用相同调度资源的同级待执行指令建立对应的多个有向无环图。
20、进一步地,根据所述约束条件及所述节点列表的实际调度信息,建立所述目标函数,包括:
21、获取所述节点列表的实际调度信息和父子节点预设等待时间;其中,所述实际调度信息包括父子节点实际等待时间、各节点实际耗时、各节点实际调度资源消耗量、遍历列表总耗时以及调度资源的运输路线;
22、根据所述父子节点实际等待时间和父子节点预设等待时间确定等待偏差;
23、根据所述各节点实际耗时和所述约束条件确定节点耗时偏差;
24、根据所述各节点实际调度资源消耗量和所述约束条件确定调度资源消耗偏差;
25、将所述等待偏差、调度资源消耗偏差、节点耗时偏差、遍历列表总耗时和运输路线进行非线性加权,得到目标函数。
26、进一步地,利用所述占用相同调度资源的同级待执行指令建立对应的多个有向无环图后,进一步包括:
27、遍历所述多个有向无环图中的节点,得到满足各节点之间的优先级关系和依赖关系的多个节点列表。
28、进一步地,通过群智能优化算法在所述约束条件下对所述目标函数进行优化,得到所述目标函数的最优解,包括:
29、对所述多个节点列表进行映射,生成对应的搜索域;
30、在所述搜索域内,利用改进的混沌映射初始化种群;
31、根据个体的行为属性,更新种群中所有个体的位置;
32、判断更新后每个个体的位置是否超出预设区域;
33、若超出预设区域,则利用所述行为属性对应的位置更新算法更新个体位置;
34、若未超出预设区域,则对种群中个体的位置进行扰动;
35、根据扰动前后个体的适应度,判断是否利用所述行为属性对应的位置更新算法更新个体位置;所述个体的适应度根据个体的位置及所述目标函数确定;
36、重复如上更新个体位置的步骤,直至迭代次数达到第一阈值,得到第一最优解。
37、进一步地,通过群智能优化算法在所述约束条件下对所述目标函数进行优化,得到所述目标函数的最优解,进一步包括:
38、初始化模拟退火参数;
39、在所述第一最优解的邻域内,利用改进的混沌映射随机选取临时解;
40、利用蒙特卡洛准则,根据所述第一最优解和临时解的适应度,确定目标解;
41、判断当前模拟退火参数下,所述目标解是否符合预设条件;
42、若不符合预设条件,则重复如上随机选取临时解的过程,以更新目标解,直至所述目标解符合预设条件;
43、若符合预设条件,则对所述模拟退火参数进行降温,并重复如上随机选取临时解的步骤,直至迭代次数达到第二阈值,得到第二最优解。
44、进一步地,所述改进的混沌映射通过在tent混沌映射上引入基于混沌序列粒子数构建的随机变量得到。
45、进一步地,对种群中个体的位置进行扰动,包括:
46、获取扰动个体位置时的当前迭代次数和最大迭代次数;
47、根据所述当前迭代次数和最大迭代次数,利用预设的动态选择概率参数,确定动态选择概率;
48、以当前迭代次数为自由度,基于所述动态选择概率建立扰动策略;
49、利用所述扰动策略对种群中个体的位置进行扰动。
50、另一方面,本说明书的一些实施例还提供一种流程调度装置,所述装置包括:
51、接收模块,用于接收流程调度请求;
52、确定模块,用于响应于所述流程调度请求,确定执行中的指令、待执行指令和调度资源信息;
53、建立模块,用于根据所述执行中的指令、待执行指令和调度资源信息与对应的实际调度信息建立目标函数及约束条件;
54、优化模块,用于通过群智能优化算法在所述约束条件下对所述目标函数进行优化,得到所述目标函数的最优解;
55、调度模块,用于利用所述最优解确定指令执行策略,以进行流程调度。
56、另一方面,本说明书的一些实施例还提供了一种计算机设备,包括存储器、处理器、以及存储在所述存储器上的计算机程序,所述计算机程序被所述处理器运行时,执行上述方法的指令。
57、另一方面,本说明书的一些实施例还提供了一种计算机存储介质,其上存储有计算机程序,所述计算机程序被计算机设备的处理器运行时,执行上述方法的指令。
58、本说明书的一些实施例提供的一个或者多个技术方案,至少具有如下的技术效果:
59、本说明书的实施例自动接收流程调度请求,以确定执行中的指令、待执行指令和调度资源信息,并根据执行中的指令、待执行指令和调度资源信息之间的内在联系建立约束条件,并获取实际调度信息,基于实际调度信息建立得到在约束条件下的目标函数之后利用群智能优化算法对目标函数进行优化,利用优化得到的目标函数最优解来确定指令执行策略,以指导流程调度,从而充分利用调度资源信息,提高流程调度效率。
60、上述说明仅是本说明书的一些实施例技术方案的概述,为了能够更清楚了解本说明书的一些实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本说明书的一些实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本说明书的一些实施例的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!