一种基于水上无人设备的任务规划系统及水上无人设备的制作方法
本技术涉及任务协同,具体涉及一种基于水上无人设备的任务规划系统及水上无人设备。
背景技术:
1、水上无人设备是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,它融合了船舶、通信、自动化、机器人控制、远程监控、网络化系统等技术,实现了自主导航、智能避障、远距离通信、视频实时传输和网络化监控等功能。为了进一步加强预设任务的规划能力,并提升大型海洋科考任务的规划管理能力,需要对面向多艇、多任务、多人、多场地的平台化任务规划进行研究。然而,在现有技术中,平台级任务规划由艇端软件和岸基软件互相协同完成,是“一主多辅”式的分布式系统,但是由于水上无人设备和岸基之间的网络带宽受成本限制,且不能保证随时随地的网络联通,导致岸基发送的数据水上无人设备无法全部获取,那么进而导致水上无人设备在执行任务时会出现卡顿的现象。
技术实现思路
1、为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种基于水上无人设备的任务规划系统及水上无人设备,解决了水上无人设备和岸基系统之间因网络带宽受成本限制,且不能保证随时随地的网络联通,而导致岸基系统发送的数据水上无人设备无法全部获取的问题。
2、根据本技术的一个方面,提供了一种基于无人艇的任务规划系统,包括:
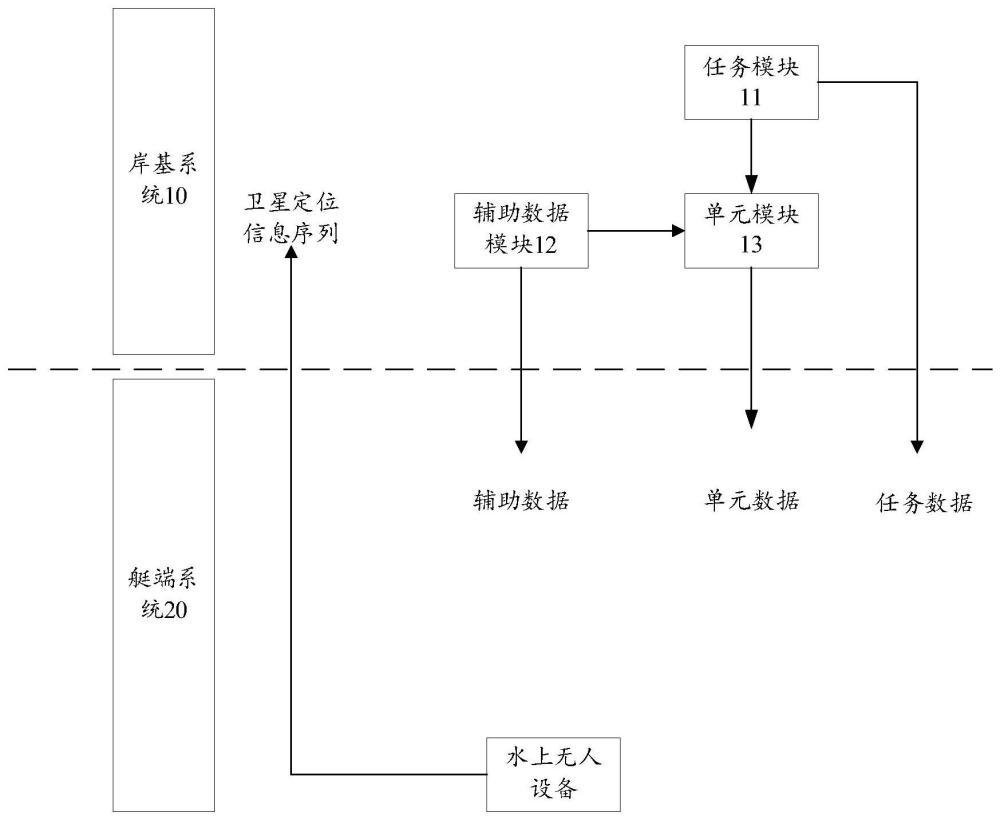
3、岸基系统,所述岸基系统包括任务模块、辅助数据模块和单元模块,所述任务模块生成多个任务数据,所述单元模块生成多个单元数据,所述多个任务数据引用所述多个单元数据,且每个任务数据包括配置信息,每个单元数据包括地图交互绘制信息、多个航行坐标点;所述岸基系统对所述辅助数据模块进行管理,所述辅助数据模块包括辅助数据;
4、艇端系统,所述艇端系统与所述岸基系统通信连接,所述艇端系统接收所述配置信息、所述地图交互绘制信息、所述多个航行坐标点以及所述辅助数据;
5、并根据所述配置信息、所述地图交互绘制信息、所述多个航行坐标点以及所述辅助数据,生成路径点序列;
6、根据所述路径点序列,生成任务命令,所述艇端系统将所述任务命令发送至当前水上无人设备,所述当前水上无人设备的执行机构执行所述任务命令;所述当前水上无人设备的卫星定位设备生成卫星定位信息序列,所述艇端系统将所述卫星定位信息序列发送至所述岸基系统,以使所述岸基系统对所述当前水上无人设备进行监控、回放和质量评估。
7、在一实施例中,所述艇端系统包括辅助模块,所述辅助模块与所述辅助数据模块通信连接,所述辅助模块用于接收所述辅助数据并根据所述当前水上无人设备在航行时的探测信息,对所述辅助数据进行增补和调整,以得到调整后的辅助数据,所述艇端系统的路径点生成模块根据所述配置信息、所述地图交互绘制信息、所述多个航行坐标点以及所述调整后的辅助数据,生成调整后的路径点序列;其中,所述辅助数据包括障碍物和航行限制区域。
8、在一实施例中,所述根据所述当前水上无人设备在航行时的探测信息,对所述辅助数据进行调整,以得到调整后的辅助数据包括:
9、获取所述当前水上无人设备在航行时的探测信息;其中,所述探测信息包括可图形化信息,所述可图形化信息包括障碍物的位置坐标、速度、尺寸;
10、根据所述障碍物的位置坐标、速度、尺寸,对所述辅助数据进行调整,以得到调整后的辅助数据。
11、在一实施例中,所述艇端系统包括调整模块,所述调整模块与所述艇端系统的命令模块通信连接,所述调整模块包括第一调整单元和第二调整单元,所述第一调整单元用于调整所述岸基系统发送的任务数据中人工初始定义的任务线以及所述岸基系统发送的单元数据中人工初始定义的单元线,所述第二调整单元用于调整所述路径点序列。
12、在一实施例中,所述第二调整单元用于根据所述当前水上无人设备的规格参数信息,选取所述路径点序列中的多个航行关键点、关键区间进行调整,以得到调整后的路径点序列,所述艇端系统的命令模块用于根据所述调整后的路径点序列,生成调整后的任务命令;其中,所述规格参数信息包括所述当前水上无人设备的长、宽、最大航速、经济航速、所述当前水上无人设备的吃水深度以及所述当前水上无人设备的转弯半径。
13、在一实施例中,所述岸基系统包括监控模块,所述监控模块与所述卫星定位设备通信连接,所述监控模块用于监控所述艇端系统发送所述卫星定位信息序列与预设定位信息序列之间的偏差。
14、在一实施例中,所述岸基系统包括托管模块,所述托管模块用于将所述多个任务数据和所述多个单元数据的编辑权发送至所述艇端系统,所述艇端系统中的编辑模块编辑接收到的所述多个任务数据和所述多个单元数据,以得到编辑后的任务数据和单元数据。
15、在一实施例中,所述艇端系统包括数据上传模块,所述数据上传模块与所述编辑模块通信连接,所述数据上传模块用于将所述编辑后的任务数据和单元数据发送至岸基系统,并将对所述编辑后的任务数据和单元数据的编辑权转移给所述岸基系统。
16、在一实施例中,所述艇端系统包括装订模块,所述装订模块用于将所述岸基系统发送的所述多个任务数据和多个所述任务命令按照预设规则进行组合。
17、本技术另一方面提供了一种水上无人设备,包括:
18、船体;
19、设置在所述船体上的卫星定位设备,所述卫星定位设备用于生成卫星定位信息序列,并将所述卫星定位信息序列发送至基于水上无人设备的任务规划系统中的岸基系统;
20、设置在所述船体上的执行机构,所述执行机构与所述基于水上无人设备的任务规划系统中的艇端系统通信连接,用于接收所述艇端系统发送的任务命令,以执行所述任务命令。
21、本技术提供的基于水上无人设备的任务规划系统及水上无人设备,包括:岸基系统以及艇端系统,岸基系统包括任务模块、辅助数据模块和单元模块,任务模块生成多个任务数据,单元模块生成多个单元数据,多个任务数据引用多个单元数据,且每个任务数据包括配置信息,每个单元数据包括地图交互绘制信息、多个航行坐标点,岸基系统对辅助数据模块进行管理,辅助数据模块包括辅助数据,艇端系统与岸基系统通信连接,艇端系统接收配置信息、地图交互绘制信息、多个航行坐标点以及辅助数据,并根据配置信息、地图交互绘制信息、多个航行坐标点以及辅助数据,生成路径点序列,根据路径点序列,生成任务命令,艇端系统将任务命令发送至当前水上无人设备,当前水上无人设备的执行机构执行任务命令,当前水上无人设备的卫星定位设备生成卫星定位信息序列,艇端系统将卫星定位信息序列发送至岸基系统,以使岸基系统对当前水上无人设备进行监控、回放和质量评估。。通过岸基系统将任务数据和单元数据发送至艇端系统,艇端系统对单元数据、任务数据进行处理,从而生成任务航线,解决了当水上无人设备和岸基系统之间的网络带宽受成本限制时,水上无人设备可以接受少部分数据并保证作业顺利。然后,当水上无人设备按照任务航线航行时,生成的卫星定位信息序列再发送至岸基系统,岸基系统可以对水上无人设备进行监控,从而保证水上无人设备出现事故时,岸基系统可以及时响应。
- 还没有人留言评论。精彩留言会获得点赞!