一种平流层飞艇控制系统故障诊断方法、装置及系统
本发明涉及控制系统故障诊断,尤其是涉及一种平流层飞艇控制系统故障诊断方法、装置及系统。
背景技术:
1、控制系统的安全性和可靠性是飞行器完成既定任务的重要保障,是控制系统研究的关键问题。有研究表明,飞行器大部分故障由控制系统的故障造成,其中执行机构故障是控制系统的主要故障形式。平流层飞艇是一类复杂系统,其控制系统具有强非线性、多状态量和强耦合性等多种特征。其在平流层环境中进行飞行,不可避免受到环境等因素影响,加上长航时飞行,其执行机构难以避免发生故障,从而导致平流层飞艇飞行控制性能下降,难以完成既定任务。因此研究针对平流层飞艇的故障诊断技术尤为重要,当出现故障时实施有效的故障检测与诊断,并进行故障隔离,是建立平流层飞艇健康监测、无人值守系统、实现自主容错控制,进行飞行决策的必要条件,具有重要意义。
2、观测器方法是指当系统的状态可观或者部分可观时,构造观测器估计出系统输出值,并与系统状态/输出的实际测量值做比较得到残差信号,再通过对残差信号的统计特性分析来达到故障检测和诊断的目的。观测器方法已经比较成功应用于线性系统的故障诊断,然而平流层飞艇是一类复杂系统,其控制系统具有强非线性、多状态量和强耦合性等多种特征。很多研究方案是将非线性系统用多线性系统进行拟合。然而由于非线性系统各部分之间总是相互影响,不断发生耦合作用,使得非线性问题既复杂又多样,实现平流层飞艇这种具有典型非线性特性的控制系统的故障诊断有很大困难。
技术实现思路
1、本发明的目的是提供一种平流层飞艇控制系统故障诊断方法、装置及系统,实现控制系统的故障检测、定位和故障估计,提高控制系统的可靠性。
2、为实现上述目的,本发明提供了一种平流层飞艇控制系统故障诊断方法、装置及系统,包括以下步骤:
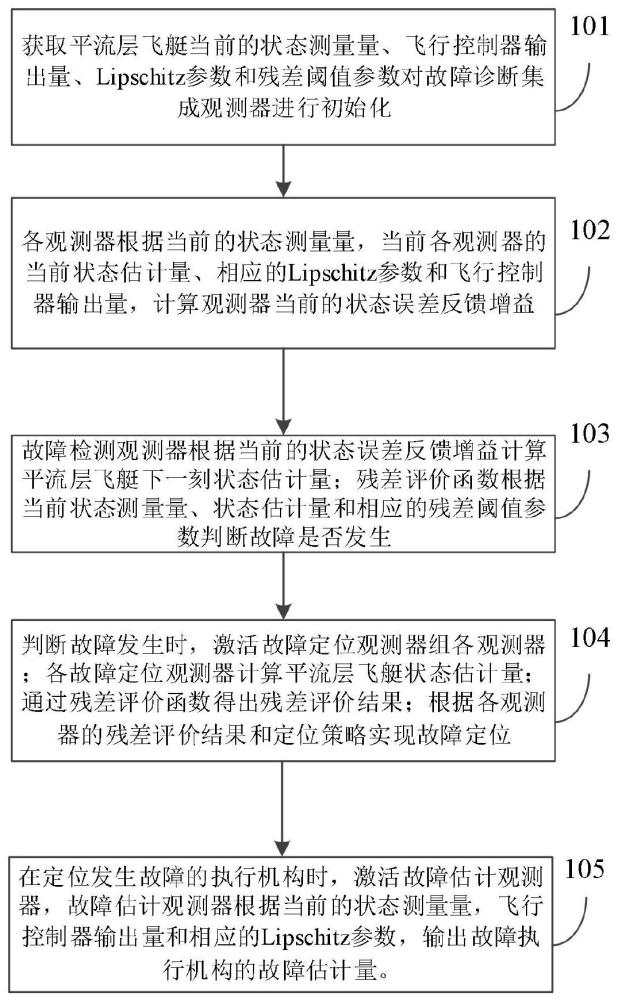
3、s101、获取平流层飞艇当前的状态测量量、飞行控制器输出量、lipschitz参数和残差阈值参数对故障诊断集成观测器进行初始化;
4、s102、各观测器根据当前的状态测量量,当前各观测器的当前状态估计量、相应的lipschitz参数和飞行控制器输出量,计算观测器当前的状态误差反馈增益;
5、s103、故障检测观测器根据当前的状态测量量、飞行控制器输出量和相应的lipschitz参数,计算平流层飞艇下一刻故障检测观测器状态估计量;根据当前故障检测观测器的状态估计量、状态测量量和残差阈值参数,通过残差评价函数判断平流层飞艇控制系统是否发生故障;
6、s104、当判断故障发生时,激活故障定位观测器组各观测器;各故障定位观测器根据当前的状态测量量、飞行控制器输出量和相应的lipschitz参数,计算平流层飞艇下一刻故障定位观测器组各观测器的状态估计量;根据当前的故障定位观测器组各观测器状态估计量、状态测量量和相应的残差阈值参数,通过残差评价函数得出故障定位观测器组各观测器的残差评价结果;根据故障定位观测器组各观测器的的残差评价结果和定位策略实现故障定位;
7、s105、在定位发生故障的执行机构时,激活故障估计观测器,故障估计观测器根据当前的状态测量量、飞行控制器输出量和相应的lipschitz参数,输出故障执行机构的故障估计量。
8、优选的,步骤s101中,所述故障诊断集成观测器包括故障检测观测器、故障定位观测器组各观测器、故障估计观测器;
9、所述状态测量量包括平流层飞艇的位置参数和姿态参数,所述位置参数包括三维地面惯性坐标系坐标和艇体三维速度,所述姿态参数包括平流层飞艇俯仰角及其角速度、航向角及其角速度、滚转角及其角速度;
10、所述lipschitz参数包括故障检测观测器、故障定位观测器组各观测器和故障估计观测器的lipschitz参数;
11、所述残差阈值参数包括故障检测观测器和故障定位观测器组各观测器的残差评价参数;
12、所述飞行控制器输出量包括飞行控制器向平流层飞艇各执行机构输出的控制量。
13、优选的,步骤s102中,故障诊断集成观测器根据当前的状态测量量、当前各观测器的状态估计量、相应的lipschitz参数和飞行控制器输出量计算当前各状态误差的反馈增益;
14、所述当前各状态误差反馈增益包括故障检测观测器、故障定位观测器组各观测器,故障估计观测器的状态误差反馈增益。
15、优选的,步骤s103中,所述故障检测观测器的状态估计量包括故障检测观测器计算出的位置参数估计值和姿态参数估计值。
16、优选的,步骤s104中,所述故障定位观测器组各观测器状态估计量包括故障定位观测器组各观测器计算出的位置参数估计值和姿态参数估计值。
17、优选的,步骤s105中,故障估计观测器根据当前的状态测量量、当前的状态估计量、相应的lipschitz参数和飞行控制器输出量计算平流层飞艇的状态估计量和故障执行机构的故障估计量,输出故障估计量。
18、本发明还提供了一种平流层飞艇控制系统故障诊断装置,包括传感器,飞行控制器,故障检测观测器系统,故障定位观测器系统,故障估计观测器系统,平流层飞艇本体;
19、所述传感器与平流层飞艇本体连接;所述飞行控制器与故障检测观测器系统、故障定位观测器系统、故障估计观测器系统连接;所述故障检测观测器系统与故障定位观测器系统连接;所述故障定位观测器系统与故障估计观测器系统连接;所述飞行控制器、故障检测观测器系统、故障定位观测器系统、故障估计观测器系统均与传感器连接;
20、所述传感器用于获取平流层飞艇的当前状态测量量;所述飞行控制器用于输出当前平流层飞艇执行器的控制量;所述故障检测观测器系统用于判断是否有故障发生;所述故障定位观测器系统用于定位发生故障的执行机构;所述故障估计观测器系统用于估计故障执行器的故障输入估计值。
21、本发明还提供了一种平流层飞艇控制系统故障诊断系统,包括:
22、初始化模块,用于初始化各观测器;
23、参数获取模块,用于获取平流层飞艇当前状态测量量参数,飞行控制器输出量、lipschitz参数和残差阈值参数;所述状态量参数包括位置参数和姿态参数,所述位置参数包括三维地面惯性坐标系坐标和艇体三维速度,所述姿态参数包括平流层飞艇俯仰角及其角速度、航向角及其角速度、滚转角及其角速度;所述lipschitz参数包括故障检测模块、故障定位模块、故障估计模块的lipschitz参数;所述残差阈值参数包括故障检测模块和故障定位模块的残差评价参数;所述飞行控制器输出量包括飞行控制器向平流层飞艇各执行机构输出的控制量;
24、故障检测模块,用于判断是否故障发生,输出故障是否发生的判断逻辑信号;
25、故障定位模块,用于定位发生故障的执行机构,输出故障执行器位置;
26、故障估计模块,用于估计发生故障的执行机构的故障大小,输出故障执行器的故障输入值。
27、因此,本发明采用上述一种平流层飞艇控制系统故障诊断方法、装置及系统,利用非线性观测器技术对控制系统进行故障诊断,集成完成故障检测、故障定位及故障估计,为平流层飞艇的飞行决策提供保障,提高平流层飞艇控制系统的可靠性。
28、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!