一种基于双组阀的蒸汽流量控制方法及系统与流程
本发明涉及阀门流量控制,具体而言,涉及一种基于双组阀的蒸汽流量控制方法及系统。
背景技术:
1、双组阀是一种常用于控制蒸汽流量的阀门设备。它由两个独立操作的阀门组成,通常被称为主阀和副阀;当主阀打开时,它允许蒸汽通过主要的流道流向目标设备或系统,副阀则用于调节主阀的开度,通过调节副阀开度,可以控制主阀的流量大小,从而实现对蒸汽流量的精确控制;双组阀通常具有精确的调节能力和响应速度,其工作原理基于主阀和副阀之间的相互作用,当副阀打开时,它通过一系列机械或液压装置调整主阀的开度,这样,副阀开度直接影响主阀的开度,进而影响蒸汽流量。
2、然而蒸汽中含有杂质或沉积物会,阀门在控制过程中会出现振动,这会影响流量的调节效率、稳定性和阀门的寿命。
3、因此,有必要设置一种基于双组阀的蒸汽流量控制方法及系统用以解决当前技术中蒸汽中含有杂质或沉积物影响流量的调节效率、稳定性和阀门的寿命问题。
技术实现思路
1、鉴于此,本发明提出了一种基于双组阀的蒸汽流量控制方法及系统,旨在解决蒸汽中含有杂质或沉积物影响流量的调节效率、稳定性和阀门的寿命的技术问题。
2、一方面,本发明提出了一种基于双组阀的蒸汽流量控制方法及系统,包括:
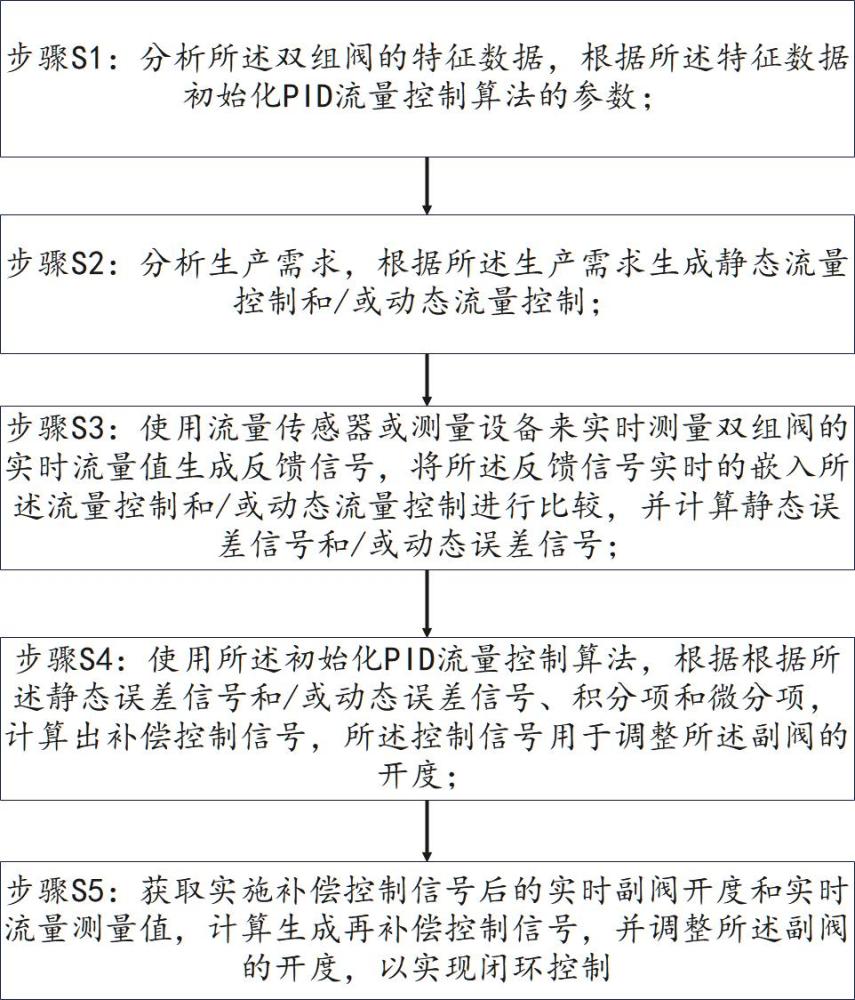
3、步骤s1:分析所述双组阀的特征数据,根据所述特征数据初始化pid流量控制算法的参数;
4、步骤s2:分析生产需求,根据所述生产需求生成静态流量控制和/或动态流量控制;
5、步骤s3:使用流量传感器或测量设备来实时测量双组阀的实时流量值生成反馈信号,将所述反馈信号实时的嵌入所述流量控制和/或动态流量控制进行比较,并计算静态误差信号和/或动态误差信号;
6、步骤s4:使用所述初始化pid流量控制算法,根据根据所述静态误差信号和/或动态误差信号、积分项和微分项,计算出补偿控制信号,所述控制信号用于调整所述副阀开度;
7、步骤s5:获取实施补偿控制信号后的实时副阀开度和实时流量测量值,计算生成再补偿控制信号,并调整所述副阀开度,以实现闭环控制。
8、优选的,所述步骤s1中,分析所述双组阀的特征数据包括:收集流量响应曲线、副阀开度与流量的关系、动态特性、振动情况,分析获得双组阀的稳态误差、响应速度、阻尼特性;
9、所述步骤s1中,根据所述特征数据初始化pid流量控制算法的参数包括:
10、预设比例系数kp:根据所述特征数据中的所述副阀开度与流量关系,选择比例系数,使得控制输出与误差之间的关系;
11、预设积分系数ti:根据所述特征数据中的所述稳态误差和所述响应速度,选择积分系数,以消除稳态误差;
12、预设微分系数td:根据特征数据中的所述动态特性和振动情况,选择微分系数,以提高系统的稳定性和抗干扰能力。
13、优选的,所述步骤s2中,所述分析生产需求,包括:评估生产需求,获取生产需求信息;
14、所述步骤s2中,根据所述生产需求信息生成静态流量控制和/或动态流量控制,包括:
15、根据所述生产需求信息设定静态目标流量和动态目标流量,并按照时间进行排序;
16、所述静态流量控制预设有多个保持单位时间,将维持每一所述静态目标流量的按照每一所述保持单位时间依次截取,生成第一静态目标流量、第二静态目标流量,...,第n静态目标流量,且对应生成,第一保持单位时间、第二保持单位时间,...,第n保持单位时间;
17、所述动态流量控制预设有多个增长单位时间,将所述静态流量控制结束后增量接近的每一所述动态目标流量按照每一所述增长单位时间依次截取,生成第一增长目标流量、第二增长目标流量,...,第n增长目标流量,且对应生成,第一增长单位时间、第二增长单位时间,...,第n增长单位时间;
18、所述动态流量控制预设有多个减少单位时间,将所述静态流量控制结束后减少接近的每一所述动态目标流量按照每一所述减少单位时间依次截取,生成第一减少目标流量、第二减少目标流量,...,第n减少目标流量且对应生成,第一减少单位时间、第二减少单位时间,...,第n减少单位时间。
19、优选的,所述步骤s3中,使用流量传感器或测量设备来实时测量双组阀的流量生成反馈信号,将所述反馈信号实时的嵌入所述流量控制和/或动态流量控制进行比较,并计算静态误差信号和/或动态误差信号,包括:
20、分析所述反馈信号的时间点属于哪一单位时间,进行比对,计算生成静态误差信号和/或动态误差信号,包括:
21、当所述反馈信号的时间点落入所述第一保持单位时间、第二保持单位时间,...,第n保持单位时间中的任一项时,直接计算该保持单位时间内对应的目标流量与所述反馈信号的实时流量值之间的差值,生成所述静态误差信号j。
22、优选的,所述步骤s3中,分析所述反馈信号的时间点属于哪一单位时间,进行比对,计算生成静态误差信号和/或动态误差信号,还包括:
23、当所述反馈信号的时间点落入所述第一增长单位时间、第二增长单位时间,...,第n增长单位时间的任一项时,计算该增长单位时间对应的动态目标流量与所述反馈信号的实时流量值之间的差值k,且预设有第一生成增区误差信号h1、第二生成增区误差信号h2和第三生成增区误差信号h3,且h1<h2<0<h3,且预设有增区修正系数1<p1<p2<1.2,根据比对结果确定所述动态误差信号w;
24、当k≤h1时,选择动态误差信号为第一动态误差信号w1,且使用所述增区修正系数p1进行修正,确定所述动态误差信号为w1×p1;
25、当h1<k≤h2时,选择动态误差信号第二动态误差信号w2且使用所述增区修正系数p2进行修正,确定所述动态误差信号为w2×p2;
26、当h2<k≤h3时,确定所述动态误差信号第三动态误差信号w3;
27、其中,w1<w2<w3。
28、优选的,所述步骤s3中,分析所述反馈信号的时间点属于哪一单位时间,进行比对,计算生成静态误差信号和/或动态误差信号,还包括:
29、当所述反馈信号的时间点落入所述第一减少单位时间、第二减少单位时间,...,第n减少单位时间的任一项时,计算该减少单位时间对应的动态目标流量与所述反馈信号的实时流量值之间的差值r,且预设有第一生成减区误差信号l1、第二生成减区误差信号l2和第三生成减区误差信号l3,且l1<0<l2<l3,且预设有减区修正系数1<e1<e2<1.2,根据比对结果确定所述动态误差信号w;
30、当r≤l1时,确定所述动态误差信号为第四动态误差信号w4;
31、当l1<r≤l2时,选择动态误差信号为第五动态误差信号w5,且使用所述减区修正系数e1进行修正,确定所述动态误差信号为w5×e1;
32、当l2<r≤l3时,选择动态误差信号为第六动态误差信号w6,且使用所述减区修正系数e1进行修正,确定所述动态误差信号为w6×e2;
33、其中,w4<w5<w6。
34、优选的,所述步骤s4中,使用所述初始化pid流量控制算法,根据根据所述静态误差信号和/或动态误差信号、积分项和微分项,计算出补偿控制信号,包括:
35、当辅助所述静态流量控制时,将比例项、积分项和微分项相加,得到静态补偿信号y,由以下公式计算:
36、
37、其中,kp为预设比例系数,为预设积分系数,td为预设微分系数,为第i个静态误差信号,为上一单位时间的误差信号。
38、优选的,所述步骤s4中,使用所述初始化pid流量控制算法,根据根据所述静态误差信号和/或动态误差信号、积分项和微分项,计算出补偿控制信号,还包括:
39、当辅助所述动态流量控制时,将比例项、积分项和微分项相加,得到动态补偿信号q,由以下公式计算:
40、
41、其中,kp为预设比例系数,为预设积分系数,td为预设微分系数,为第i个动态误差信号,为上一单位时间的误差信号。
42、另一方面,本发明还提供一种基于双组阀的蒸汽流量控制系统,包括:
43、初始流量控制模块,分析所述双组阀的特征数据,根据所述特征数据初始化pid流量控制算法的参数;
44、信息获取模块,分析生产需求,根据所述生产需求生成静态流量控制和/或动态流量控制;
45、分析模块,使用流量传感器或测量设备来实时测量双组阀的实时流量值生成反馈信号,将所述反馈信号实时的嵌入所述流量控制和/或动态流量控制进行比较,并计算静态误差信号和/或动态误差信号;
46、计算模块,使用所述初始化pid流量控制算法,根据根据所述静态误差信号和/或动态误差信号、积分项和微分项,计算出补偿控制信号,所述控制信号用于调整所述副阀开度;
47、自适应模块,获取实施补偿控制信号后的实时副阀开度和实时流量测量值,计算生成再补偿控制信号,并调整所述副阀开度,以实现闭环控制。
48、与现有技术相比,本发明的有益效果在于:通过分析双组阀的特征数据,使用pid流量控制算法来初始化控制参数,以适应不同的工况和要求;利用初始化的pid流量控制算法,根据静态误差信号和/或动态误差信号、积分项和微分项计算补偿控制信号,调整副阀开度;可以当蒸汽中出现杂质或沉积物时,根据实际流量测量值和目标值之间的误差,自动调整副阀实现精确的流量控制,从而减少杂质和沉积物对流量调节的干扰,提高流量调节的稳定性和精确性。
49、并且通过获取实施补偿控制信号后的实时副阀开度和实时流量测量值,计算生成再补偿控制信号,并进一步调整副阀开度,以实现闭环控制。
50、此方法及系统可以提高蒸汽流量控制的精度和稳定性,适用于需要对蒸汽流量进行精确控制的工业应用。
- 还没有人留言评论。精彩留言会获得点赞!