一种工业机器人控制过程给定信号修正装置及控制系统的制作方法
本发明涉及机器人控制,尤其涉及一种工业机器人控制过程给定信号修正装置及控制系统。
背景技术:
1、在工业过程控制实践中,工程研究人员发明出一种加速型工程最速比例-积分(accelerated engineering fastest proportional-integral,aefpi)控制器,显著提高了反馈控制性能。aefpi适合单独运用,相对比例-积分(proportional-integral,pi)控制性能的提升幅度是足够的。
2、在实践中发现,aefpi控制的过程超调量较大,是aefpi控制的固有特性。但在工业机器人关节位置、速度、力矩等控制系统中,不允许出现较大的过程超调,通常在过程给定端接入一个一阶惯性滤波器(first order inertial filter,foif)对抑制过程超调有较好的作用。然而,这种简单的处理方法明显降低了aefpi控制的调节性能。因此,对于现有技术在进行工业机器人控制过程给定信号修正时存在调节性能低的问题。
3、因此,亟需一种工业机器人控制过程给定信号修正策略,从而解决现有技术在进行工业机器人控制过程给定信号修正时存在调节性能低的问题。
技术实现思路
1、本发明实施例提供一种工业机器人控制过程给定信号修正装置及控制系统,以提高修正工业机器人控制过程给定信号的调节性能。
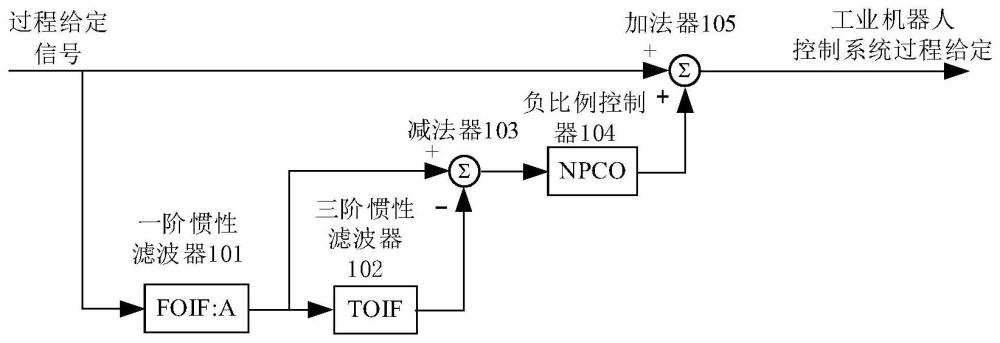
2、为了解决上述问题,本发明一实施例提供一种工业机器人控制过程给定信号修正装置,包括:一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器;
3、所述一阶惯性滤波器的输出端分别与所述三阶惯性滤波器的输入端和所述减法器的第一输入端连接,所述三阶惯性滤波器的输出端与所述加法器的第二输入端连接,所述减法器的输出端与所述负比例控制器的输入端连接,所述负比例控制器的输出端与所述加法器的第一输入端连接。
4、作为上述方案的改进,本实施例还包括:所述一阶惯性滤波器的输入端和所述加法器的第二输入端用于接收过程给定信号,所述加法器的输出端用于输出工业机器人控制系统过程给定。
5、作为上述方案的改进,所述过程给定信号具体为:工业机器人关节速度控制系统的过程给定信号。
6、作为上述方案的改进,所述一阶惯性滤波器,满足以下条件:
7、
8、式中,ffoif:a(s)为一阶惯性滤波器的拉普拉斯传递函数;tfoif:a为一阶惯性滤波器的时间常数,单位为毫秒(ms)。
9、作为上述方案的改进,所述三阶惯性滤波器,满足以下条件:
10、
11、式中,ftoif(s)为三阶惯性滤波器的拉普拉斯传递函数;ttoif为三阶惯性滤波器的时间常数,单位为毫秒(ms)。
12、作为上述方案的改进,所述负比例控制器,满足以下条件:
13、fnpco(s)=-knpco
14、式中,fnpco(s)为比例控制器的拉普拉斯传递函数;knpco为比例控制器的增益,单位为无量纲。
15、作为上述方案的改进,所述工业机器人控制系统过程给定,满足以下条件:
16、
17、式中,faefcspg(s)为工业机器人控制系统过程给定的拉普拉斯传递函数;fnpco(s)为负比例控制器的拉普拉斯传递函数,knpco为负比例控制器的增益,单位为无量纲;ffoif:a(s)为一阶惯性滤波器的拉普拉斯传递函数,tfoif:a为一阶惯性滤波器的时间常数,单位为ms;ftoif(s)为三阶惯性滤波器的拉普拉斯传递函数,ttoif为三阶惯性滤波器的时间常数,单位为ms。
18、相应的,本发明一实施例还提供了一种工业机器人关节速度最速控制系统,包括:工业机器人控制过程给定信号修正装置、反馈单元、加速型工程最速比例-积分控制器、过程装置;其中,所述工业机器人控制过程给定信号修正装置应用如本发明所述的工业机器人控制过程给定信号修正装置;
19、所述工业机器人控制过程给定信号修正装置的输入端接入过程给定信号,所述工业机器人控制过程给定信号修正装置的输出端与所述反馈单元连接,所述反馈单元的输出端与所述加速型工程最速比例-积分控制器的输入端连接,所述加速型工程最速比例-积分控制器的输出端与所述过程装置连接,所述过程装置的输出端与所述反馈单元连接,形成闭环反馈。
20、作为上述方案的改进,所述加速型工程最速比例-积分控制器,满足以下条件:
21、faefpi(s)=kaefpi[1+faefi(s)],
22、
23、
24、taefi=taeftf
25、式中,faefpi(s)为aefpi的传递函数,kaefpi串级比例控制增益,单位为无量纲;faefi(s)为加速型工程最速积分器的传递函数,faeftf(s)为加速型工程最速跟踪滤波器的传递函数;taefi为aefi的时间常数,单位为ms;taeftf为aeftf的时间常数,单位为ms;n为阶次,单位无量纲;i和l为过程变量,均为正整数;数量上taefi=taeftf。
26、作为上述方案的改进,所述过程装置具体为:伺服电动机;实时伺服电动机满足以下条件:
27、
28、式中,p:sm(s)为伺服电动机的传递函数,s为拉普拉斯算子,ksm为伺服电动机增益,单位为无量纲;tsm1和tsm2分别为伺服电动机时间常数,单位为ms。
29、由上可见,本发明具有如下有益效果:
30、本发明提供了一种工业机器人控制过程给定信号修正装置,包括:一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器;所述一阶惯性滤波器的输出端分别与所述三阶惯性滤波器的输入端和所述减法器的第一输入端连接,所述三阶惯性滤波器的输出端与所述加法器的第二输入端连接,所述减法器的输出端与所述负比例控制器的输入端连接,所述负比例控制器的输出端与所述加法器的第一输入端连接。本发明使用了一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器模块,可以实现信号滤波、差异计算和反比例运算等功能,通过信号的平滑处理、差异计算和反比例控制,从而提高控制系统的稳定性和精度,基于信号的平滑处理、差异计算和反比例控制的功能,修正工业机器人控制过程给定信号,从而提高工业机器人最速控制系统的控制性能。
技术特征:
1.一种工业机器人控制过程给定信号修正装置,其特征在于,包括:一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器;
2.根据权利要求1所述的工业机器人控制过程给定信号修正装置,其特征在于,还包括:所述一阶惯性滤波器的输入端和所述加法器的第二输入端用于接收过程给定信号,所述加法器的输出端用于输出工业机器人控制系统过程给定。
3.根据权利要求2所述的工业机器人控制过程给定信号修正装置,其特征在于,所述过程给定信号具体为:工业机器人关节速度控制系统的过程给定信号。
4.根据权利要求3所述的工业机器人控制过程给定信号修正装置,其特征在于,所述一阶惯性滤波器,满足以下条件:
5.根据权利要求4所述的工业机器人控制过程给定信号修正装置,其特征在于,所述三阶惯性滤波器,满足以下条件:
6.根据权利要求5所述的工业机器人控制过程给定信号修正装置,其特征在于,所述负比例控制器,满足以下条件:
7.根据权利要求6所述的工业机器人控制过程给定信号修正装置,其特征在于,所述工业机器人控制系统过程给定,满足以下条件:
8.一种工业机器人关节速度最速控制系统,其特征在于,包括:工业机器人控制过程给定信号修正装置、反馈单元、加速型工程最速比例-积分控制器、过程装置;其中,所述工业机器人控制过程给定信号修正装置应用如权利要求1至7任意一项所述的工业机器人控制过程给定信号修正装置;
9.根据权利要求8所述的工业机器人关节速度最速控制系统,其特征在于,所述加速型工程最速比例-积分控制器,满足以下条件:
10.根据权利要求9所述的工业机器人关节速度最速控制系统,其特征在于,所述过程装置具体为:伺服电动机;实时伺服电动机满足以下条件:
技术总结
本发明公开了一种工业机器人控制过程给定信号修正装置及控制系统,包括:一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器;所述一阶惯性滤波器的输出端分别与所述三阶惯性滤波器的输入端和所述减法器的第一输入端连接,所述三阶惯性滤波器的输出端与所述加法器的第二输入端连接,所述减法器的输出端与所述负比例控制器的输入端连接,所述负比例控制器的输出端与所述加法器的第一输入端连接。本发明使用了一阶惯性滤波器、三阶惯性滤波器、减法器、负比例控制器和加法器模块,基于信号的平滑处理、差异计算和反比例控制的功能,修正工业机器人控制过程给定信号,从而提高工业机器人最速控制系统的控制性能。
技术研发人员:赵兵
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!