一种混合缺陷模式晶圆图图像滤波方法
1.本发明属于实际半导体生产中产生的晶圆图领域,具体涉及混合缺陷模式晶圆图的滤波去噪算法。
2.
背景技术:
3.半导体芯片产业是信息技术产业的核心,是支撑国家经济社会发展和保障国家安全的重要产业。晶圆是半导体芯片的核心组成成分,其生产过程尤其复杂,极易产生缺陷。在晶圆测试阶段,通过对晶圆进行针测和标记,可以得到有一定空间图案的晶圆图。通过对晶圆图空间图案进行分析,可以找出导致晶圆缺陷产生的原因,从而提高生产的良品率。
4.晶圆图除了包含本身特定的空间图案以外,还存在许多噪声点,对识别晶圆的真实缺陷图案类别产生影响,因此需要对晶圆图进行滤波处理。随着晶圆生产工艺的愈加复杂,且尺寸不断变大,出现混合缺陷模式晶圆图的概率不断增加,而且混合缺陷晶圆图相比于单一缺陷模式晶圆图更容易受到噪声点的影响。因此为了提升对混合缺陷模式晶圆图的识别分类准确率,必须对混合缺陷模式晶圆图进行有效的滤波处理。
5.
技术实现要素:
6.本发明目的在于提供一种不需要设定先验参数而可以自动选择最优参数的滤波方法,该方法可以用于大规模的混合缺陷模式晶圆图滤波处理,同时可以避免参数设置的影响,获得任意形状的簇。
7.为了实现上述目的,本发明提供了一种邻域路径滤波算法,包括:获取晶圆图像数据集,对晶圆图像数据集中的每张图像进行初步聚类处理,形成多个小聚类簇或噪声点;将初步聚类所得的多个聚类簇从大到小排序;设定排序中前num个最大聚类簇为核心簇,其余聚类簇为非核心簇;获取核心簇与非核心簇之间的半径关系和距离,计算聚类簇合并后的紧凑度den和紧密度指标f;通过紧密度指标f判断对非核心簇是否进行合并或去除处理;计算合并或去除处理之后聚类簇的sd值,sd值最大,则为最优滤波结果。
8.在一实施方式中,所述对晶圆图像数据集中的每张图像进行初步聚类处理,包括:(1)任选一个缺陷点作为初始点,并在初始点的3
×
3邻域内进行搜索;(2)在初始点的3
×
3邻域范围内的缺陷点设置为连接点,将初始点与连接点归为同一个聚类簇;(3)在连接点的3
×
3邻域范围内继续搜索缺陷点,并与之合并;(4)重复步骤(3)的过程,直到待搜索缺陷点的3
×
3邻域内不存在未标记的缺陷
点,则形成一个聚类簇;(5)重复步骤(1)(2)(3)(4),直到晶圆上所有的缺陷点都被划分为聚类簇或噪声点;(6)对不属于任一聚类簇的样本点标记为噪声点,聚类簇样本少于5的聚类簇标记为噪声簇,并去除噪声点与噪声簇。
9.在一实施方式中,所述设定排序前num个最大聚类簇为核心簇,通过观察大量的晶圆图像,以及针对混合缺陷模式晶圆图的讨论,设定num的取值范围为2-5。
10.在一实施方式中,所述获取核心簇与非核心簇之间的半径关系和距离,计算聚类簇合并后的紧凑度den和紧密度指标f,包括:设定晶圆图的圆心为原点,计算每个聚类簇中缺陷点与原点的距离,将距离的最大值和最小值作为聚类簇的最大最小半径距离,判断核心簇与非核心簇之间最大最小半径距离关系,共有4种情形;情形1:聚类簇的半径范围完全在核心簇的半径范围内,即情形2:聚类簇的最大半径距离超出核心簇的最大半径距离,即情形3:聚类簇的最小半径距离超出核心簇的最小半径距离,即情形4:聚类簇的半径范围完全不在核心簇的半径范围内,即其中,情形1-3设定参数,情形4设定参数。
11.设定初步聚类后的聚类簇集合为,核心簇集合为,非核心聚类簇的集合为,聚类簇中的样本点与聚类簇中的样本点的最近距离、最远距离、平均距离的计算公式为:为:为:其中,表示核心簇中簇的样本点,,,表示非核心聚类簇中簇的样本点,,,表示为欧氏距离,表示求最小值,表示求最大值,表示求平均值。
12.设定,,,,,,合并后的数据,紧凑度den计算公式为:紧密度指标f计算公式为:紧密度指标f计算公式为:
其中,表示与当前聚类簇最近距离最小的核心簇,表示与当前聚类簇最远距离最小的核心簇,表示当前聚类簇与核心簇合并后密度最大的核心簇,表示与当前聚类簇平均距离小于晶圆图半径r,表示交集符号,表示进行计数。
13.在一实施方式中,所述通过紧密度指标f判断对非核心簇是否进行合并或去除处理,包括:将聚类簇之间最近距离小于的聚类簇合并;判断,若对任一核心簇而言,,则去除该聚类簇;若满足,则将该聚类簇与相符合的核心簇合并;若满足,,则去除该聚类簇;若满足,,则将该聚类簇与相符合的核心簇合并。
14.对每一个聚类簇进行判断,直到晶圆图所有非核心簇被合并或去除。
15.在一实施方式中,所述计算合并或去除处理之后聚类簇的sd值,包括:计算聚类簇的轮廓系数,设定数据样本划分为个聚类簇,则第个簇中的样本点的轮廓系数的计算方式为:其中,为样本点到第个簇中其他点的距离的平均值;为样本点到除第个簇的其他所有样本点距离的最小值;计算评判数据之间相似度的马氏距离,设定第一个样本数据为,第二个样本数据为,样本数据之间的马氏距离为:其中,为和的协方差矩阵;聚类相似度指标sd通过计算轮廓系数和马氏距离综合得出,计算方式为:其中,为轮廓系数,为马氏距离。
16.附图说明
17.图1为邻域路径滤波算法的流程图图2为邻域路径滤波算法的详细实施流程图图3为初步聚类的示意图图4为半径关系示意图图5为邻域路径滤波算法示意图
具体实施方式
18.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
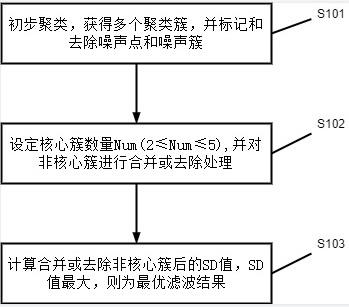
19.请参阅图1,是本发明提供一种混合缺陷模式晶圆图图像滤波方法的流程示意图。图2是发明提供一种混合缺陷模式晶圆图图像滤波方法的具体步骤流程图。如图1所示,具体的,所述一种混合缺陷模式晶圆图图像滤波方法包括以下步骤:s101、初步聚类,获得多个聚类簇,并标记和去除噪声点和噪声簇。
20.晶圆图上的缺陷类型都是由小的聚类簇组合而形成的,初步聚类形成多个聚类簇,同时标记和去除噪声点和噪声簇,初步聚类具体流程如图3所示,包括以下步骤:(1)选定初始点。图3(b)中五角星标记的缺陷点为初始点,在初始点的3
×
3邻域内存在两个缺陷点;(2)将连接点与初始点划分为同一个聚类簇。如图3(c)所示,将查询到的两个缺陷点用三角形标记,将五角星标记与三角形标记的缺陷点归为同一个聚类簇;(3)寻找与初始点路径相连的点。对图3(c)中三角形标记的缺陷点的3
×
3邻域进行查询,找到两个缺陷点,将查询到的缺陷点标记为三角形,如图3(d)所示;(4)重复步骤(3)的过程,直到待查询缺陷点的3
×
3邻域内不存在未标记的缺陷点,如图3(g)所示,即一个聚类簇形成;(5)重复步骤(1)(2)(3)(4),直到晶圆图上所有的缺陷点都被划分到聚类簇或噪声点,如图3(h)所示;(6)对不属于任一聚类簇的样本点标记为噪声点,聚类簇样本少于5的聚类簇标记为噪声簇,如图3(h)中圆形标记所示,去除噪声点与噪声簇。
21.s102、设定核心簇数量num(2≤num≤5),并对非核心簇进行合并或去除处理。
22.初步聚类将晶圆图上的缺陷划分为多个小的聚类簇,但晶圆图的整体缺陷类型图案要少于初步聚类簇的数量,因此,需要确定晶圆图整体的聚类簇的数量,也就是缺陷类型数量,才能对聚类簇进行合并。通过观察众多晶圆图图像,晶圆图的缺陷类型数量一般在1-3个,为了防止没有被观察到的晶圆图可能存在更多缺陷类型数量的情况,考虑缺陷类型数量为1-5个,而针对混合缺陷模式晶圆图的讨论,考虑缺陷类型数量为2-5个。给定核心簇数量num(2≤num≤5),对聚类簇进行合并的具体步骤如下:(1)将聚类簇之间最近距离不超过的聚类簇合并;(2)将初始聚类得到的聚类簇按从大到小排序;(3)选取最大的num个聚类簇为核心簇,对非核心簇进行合并或去除处理;对非核心簇进行合并或去除处理的具体步骤如下:(1) 计算核心簇与非核心簇之间的半径关系,以晶圆图的圆心为原点,可以计算每个聚类簇中缺陷点与原点的距离,将这个距离的最大最小值作为聚类簇的最大最小半径距离。判断非核心簇与核心簇之间最大最小半径距离的关系,半径关系的示意图如图4所示,总共存在下列四种情形:
情形1:聚类簇的半径范围完全在核心簇的半径范围内,即情形2:聚类簇的最大半径距离超出核心簇的最大半径距离,即情形3:聚类簇的最小半径距离超出核心簇的最小半径距离,即情形4:聚类簇的半径范围完全不在核心簇的半径范围内,即其中,为核心簇最小半径距离,为核心簇最大半径距离,情形1-3设定一个参数,情形4设定参数。
23.(2) 计算核心簇与非核心簇之间的距离,假设初步聚类后的聚类簇集合为,核心簇集合为,非核心聚类簇的集合为,聚类簇中的样本点与聚类簇中的样本点的最近距离、最远距离、平均距离的计算公式为:的计算公式为:的计算公式为:其中,表示核心簇中簇的样本点,,,表示非核心聚类簇中簇的样本点,,,表示为欧氏距离,表示求最小值,表示求最大值,表示求平均值。
24.(3) 计算聚类簇合并后的紧凑度den,设定,,,,,,合并后的数据,则聚类簇合并后的紧凑度den计算公式如下所示,紧凑度den越大,则说明两个聚类簇更适合合并。
25.(4) 计算聚类簇的紧密度指标f,综合聚类簇与核心簇之间的半径和距离关系,以及两个聚类簇合并后紧凑度den的关系,设定综合指标紧密度f作为最终是否合并的依据。紧密度指标f的表达式如下所示:紧密度指标f的表达式如下所示:其中,表示与当前聚类簇最近距离最小的核心簇,表示与当前聚类簇最远距离最小的核心簇,表示当前聚类簇与核心簇合并后密度最大的核心簇,表示与当前聚类簇平均距离小于晶圆图半径r,表示交集符号,表示进行计数。
26.(5) 根据聚类簇的紧密度指标f判断对非核心簇进行合并或去除处理,以及与哪个核心簇进行合并的问题,具体判断步骤如下:将聚类簇之间最近距离小于的聚类簇合并;
判断,若对任一核心簇而言,,则去除该聚类簇;若满足,则将该聚类簇与相符合的核心簇合并;若满足,,则去除该聚类簇;若满足,,则将该聚类簇与相符合的核心簇合并。
27.对每一个聚类簇进行判断,直到晶圆图所有非核心簇被合并或去除。
28.采用上述方法对晶圆图进行聚类滤波的过程如图5所示,首先经过初步聚类,获得如图5(b)所示的初步聚类图;再经过确定聚类簇数量,聚类簇合并与去除,获得如图5(c)所示的聚类图;最后还原为原始图像的表示方式,得到滤波图,如图5(d)所示。
29.s103、计算合并或去除非核心簇后的sd值,sd值最大,则为最优滤波结果。
30.计算聚类簇的轮廓系数,设定数据样本划分为个聚类簇,则第个簇中的样本点的轮廓系数的计算方式为:其中,为样本点到第个簇中其他点的距离的平均值;为样本点到除第个簇的其他所有样本点距离的最小值;计算评判数据之间相似度的马氏距离,设定第一个样本数据为,第二个样本数据为,样本数据之间的马氏距离为:其中,为和的协方差矩阵;轮廓系数是一种在相同原始数据的基础上用来评价不同算法或者算法不同运行方式对聚类结果所产生的影响的。而本文在确定聚类簇数量时的聚类效果对比,是针对合并或去除聚类簇后的对比,若只采用轮廓系数的对比会导致结果太片面。因此,本文采用轮廓系数和作为相似度评价的马氏距离的一个综合指标sd来进行聚类簇数量的选择。sd的计算方式如下所示:轮廓系数越大表示聚类效果越好,马氏距离越大表示晶圆图之间的相似度越大,因此,sd越大越好。在核心簇数量num取值范围2-5内,使得sd最大的核心簇数量num即为最优的聚类簇数量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1