采煤机前滚筒截割路径的确定方法、确定装置和确定系统与流程
本技术涉及采矿,具体而言,涉及一种采煤机前滚筒截割路径的确定方法、确定装置、计算机可读存储介质和确定系统。
背景技术:
1、随着国家大力推进煤矿智能化开采技术的发展,国内部分智能化建设矿井,逐步实现了“记忆割煤为主,人工干预为辅,无人跟机,有人巡视”的智能化采煤模式。
2、记忆割煤技术中,采煤机可以将自身截割过程中的相对位置、摇臂角度、滚筒高度、机身角度、牵引力、运行速度及方向等信息存储于控制器中,并进行综合分析得出采煤机运行轨迹,并在后续截割过程中用于指导采煤机进行自动截割。
3、目前,对采煤机记忆路径的优化技术主要有两个发展方向,一方面基于各种煤岩层界面识别手段,以实现前滚筒自动化调高;另一方面采用各种不同的方法,对记忆截割数据进行分析、处理,不断修正、优化前滚筒下一刀截割路径,提高采煤机自动割煤的准确性。但不论哪种方式,均是基于历史数据逐次对前滚筒下一刀路径进行的调整,无法实现对前滚筒未来连续n刀截割路径进行整体优化,获得整体最优化截割方案。
4、在背景技术部分中公开的以上信息只是用来加强对本文所描述技术的背景技术的理解,因此,背景技术中可能包含某些信息,这些信息对于本领域技术人员来说并未形成在本国已知的现有技术。
技术实现思路
1、本技术的主要目的在于提供一种采煤机前滚筒截割路径的确定方法、确定装置、计算机可读存储介质和确定系统,以解决现有技术中无法实现对前滚筒未来连续n刀截割路径进行整体优化的问题。
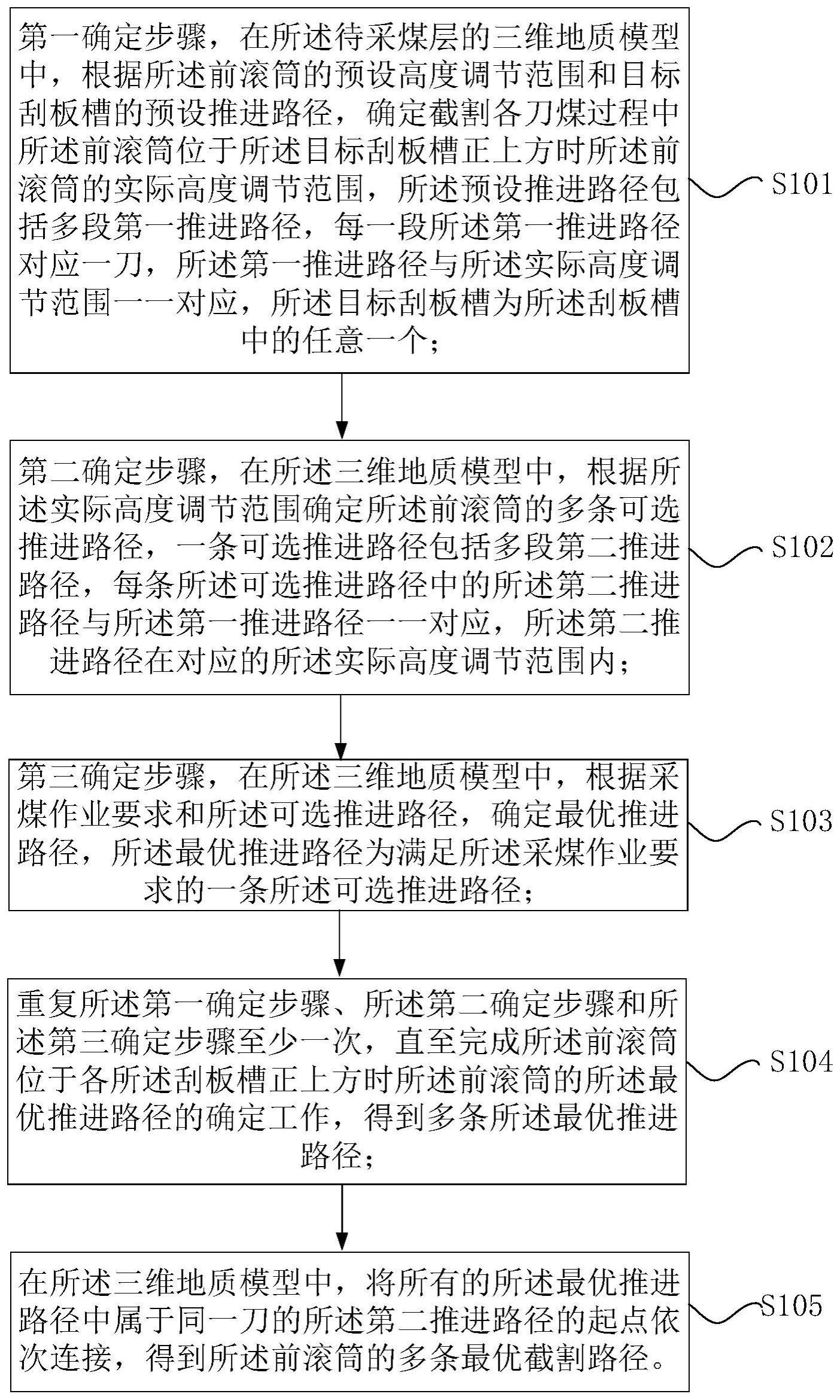
2、根据本技术实施例的一个方面,提供了一种采煤机前滚筒截割路径的确定方法,所述采煤机包括前滚筒,所述采煤机从刮板输送机的机头移动到机尾过程中所述前滚筒截割待采煤层的一刀煤,所述刮板输送机包括多个依次连接的刮板槽,采煤过程中所述前滚筒截割的煤掉落在所述前滚筒正下方的所述刮板槽中,所述方法包括:第一确定步骤,在所述待采煤层的三维地质模型中,根据所述前滚筒的预设高度调节范围和目标刮板槽的预设推进路径,确定截割各刀煤过程中所述前滚筒位于所述目标刮板槽正上方时所述前滚筒的实际高度调节范围,所述预设推进路径包括多段第一推进路径,每一段所述第一推进路径对应一刀,所述第一推进路径与所述实际高度调节范围一一对应,所述目标刮板槽为所述刮板槽中的任意一个;第二确定步骤,在所述三维地质模型中,根据所述实际高度调节范围确定所述前滚筒的多条可选推进路径,一条可选推进路径包括多段第二推进路径,每条所述可选推进路径中的所述第二推进路径与所述第一推进路径一一对应,所述第二推进路径在对应的所述实际高度调节范围内;第三确定步骤,在所述三维地质模型中,根据采煤作业要求和所述可选推进路径,确定最优推进路径,所述最优推进路径为满足所述采煤作业要求的一条所述可选推进路径;重复所述第一确定步骤、所述第二确定步骤和所述第三确定步骤至少一次,直至完成所述前滚筒位于各所述刮板槽正上方时所述前滚筒的所述最优推进路径的确定工作,得到多条所述最优推进路径;在所述三维地质模型中,将所有的所述最优推进路径中属于同一刀的所述第二推进路径的起点依次连接,得到所述前滚筒的多条最优截割路径。
3、可选地,所述实际高度调节范围包括多种调节高度,在所述三维地质模型中,根据所述实际高度调节范围确定所述前滚筒的多条可选推进路径,包括:第四确定步骤,在各刀对应的所述实际高度调节范围内选取一种所述调节高度作为所述第二推进路径,并根据各刀对应的所述第二推进路径,确定一条所述可选推进路径,在前一刀对应的所述实际高度调节范围内选取的所述调节高度大于在后一刀对应的所述实际高度调节范围内选取的所述调节高度;重复所述第四确定步骤至少一次,直至完成所有所述可选推进路径的确定工作,得到多条所述可选推进路径。
4、可选地,根据采煤作业要求和所述可选推进路径,确定最优推进路径,包括:根据所述三维地质模型,获取目标煤层顶板线,所述目标煤层顶板线为所述目标刮板槽的所述预设推进路径正上方所述三维地质模型的顶部边界线;根据各所述可选推进路径与所述目标煤层顶板线,计算得到多个留煤区域面积与多个割顶区域面积,一个所述可选推进路径与一个所述留煤区域面积对应,且与一个所述割顶区域面积对应,所述留煤区域面积为所述可选推进路径低于所述目标煤层顶板线时所述可选推进路径与所述目标煤层顶板线之间区域的面积,所述割顶区域面积为所述可选推进路径高于所述目标煤层顶板线时所述可选推进路径与所述目标煤层顶板线之间区域的面积;根据所述采煤作业要求和所述可选推进路径对应的所述留煤区域面积以及所述割顶区域面积,确定所述最优推进路径。
5、可选地,根据所述采煤作业要求和所述可选推进路径对应的所述留煤区域面积以及所述割顶区域面积,确定所述最优推进路径,包括:在所述采煤作业要求为不留顶煤时,确定所述可选推进路径中对应的所述留煤区域面积等于0且对应的所述割顶区域面积最小的所述可选推进路径为所述最优推进路径;在所述采煤作业要求为不割顶板时,确定所述可选推进路径中对应的所述留煤区域面积最小且所述割顶区域面积等于0的所述可选推进路径为所述最优推进路径;在所述采煤作业要求为沿顶截割时,确定所述可选推进路径中对应的所述留煤区域面积与对应的所述割顶区域面积和最小的所述可选推进路径为所述最优推进路径。
6、可选地,在根据所述前滚筒的预设高度调节范围和目标刮板槽的预设推进路径,确定多个实际高度调节范围之后,所述方法还包括:在所述三维地质模型中,根据所述前滚筒的所述预设高度调节范围和所述目标刮板槽的所述预设推进路径,确定所述前滚筒的截割区域;根据所述截割区域修正所述实际高度调节范围。
7、可选地,在根据采煤作业要求和所述可选推进路径,确定最优推进路径之前,所述方法还包括:在所述可选推进路径中存在至少一个高于预设高度的所述第二推进路径时,确定所述可选推进路径不是所述最优推进路径。
8、可选地,在将所有的所述最优推进路径中属于同一刀的所述第二推进路径的起点依次连接,得到所述前滚筒的多条最优截割路径之后,所述方法还包括:在每条所述最优截割路径中选取多个位置点,每个位置点对应一个所述刮板槽;将每条所述最优截割路径中的各位置点依次连接,得到所述前滚筒的截割控制线。
9、根据本技术实施例的另一个方面,还提供了一种采煤机前滚筒截割路径的确定装置,所述采煤机包括前滚筒,所述采煤机从刮板输送机的机头移动到机尾过程中所述前滚筒截割待采煤层的一刀煤,所述刮板输送机包括多个依次连接的刮板槽,采煤过程中所述前滚筒截割的煤掉落在所述前滚筒正下方的所述刮板槽中,所述装置包括:第一确定单元,用于在所述待采煤层的三维地质模型中,根据所述前滚筒的预设高度调节范围和目标刮板槽的预设推进路径,确定截割各刀煤过程中所述前滚筒位于所述目标刮板槽正上方时所述前滚筒的实际高度调节范围,所述预设推进路径包括多段第一推进路径,每一段所述第一推进路径对应一刀,所述第一推进路径与所述实际高度调节范围一一对应,所述目标刮板槽为所述刮板槽中的任意一个;第二确定单元,用于在所述三维地质模型中,根据所述实际高度调节范围确定所述前滚筒的多条可选推进路径,一条可选推进路径包括多段第二推进路径,每条所述可选推进路径中的所述第二推进路径与所述第一推进路径一一对应,所述第二推进路径在对应的所述实际高度调节范围内;第三确定单元,用于在所述三维地质模型中,根据采煤作业要求和所述可选推进路径,确定最优推进路径,所述最优推进路径为满足所述采煤作业要求的一条所述可选推进路径;迭代单元,用于重复所述第一确定单元、所述第二确定单元和所述第三确定单元至少一次,直至完成所述前滚筒位于各所述刮板槽正上方时所述前滚筒的所述最优推进路径的确定工作,得到多条所述最优推进路径;处理单元,用于在所述三维地质模型中,将所有的所述最优推进路径中属于同一刀的所述第二推进路径的起点依次连接,得到所述前滚筒的多条最优截割路径。
10、根据本技术实施例的再一个方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,所述程序被处理器执行时,所述处理器执行任意一种所述的采煤机前滚筒截割路径的确定方法。
11、根据本技术实施例的又一个方面,还提供了一种采煤机前滚筒截割路径的确定系统,包括:一个或多个处理器,存储器以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的采煤机前滚筒截割路径的确定方法。
12、上述采煤机前滚筒截割路径的确定方法,上述采煤机包括前滚筒,上述采煤机从刮板输送机的机头移动到机尾过程中上述前滚筒截割待采煤层的一刀煤,上述刮板输送机包括多个依次连接的刮板槽,采煤过程中上述前滚筒截割的煤掉落在上述前滚筒正下方的上述刮板槽中,首先,第一确定步骤,在上述待采煤层的三维地质模型中,根据上述前滚筒的预设高度调节范围和目标刮板槽的预设推进路径,确定截割各刀煤过程中上述前滚筒位于上述目标刮板槽正上方时上述前滚筒的实际高度调节范围,上述预设推进路径包括多段第一推进路径,每一段上述第一推进路径对应一刀,上述第一推进路径与上述实际高度调节范围一一对应,上述目标刮板槽为上述刮板槽中的任意一个;第二确定步骤,在上述三维地质模型中,根据上述实际高度调节范围确定上述前滚筒的多条可选推进路径,一条可选推进路径包括多段第二推进路径,每条上述可选推进路径中的上述第二推进路径与上述第一推进路径一一对应,上述第二推进路径在对应的上述实际高度调节范围内;第三确定步骤,在上述三维地质模型中,根据采煤作业要求和上述可选推进路径,确定最优推进路径,上述最优推进路径为满足上述采煤作业要求的一条上述可选推进路径;重复上述第一确定步骤、上述第二确定步骤和上述第三确定步骤至少一次,直至完成上述前滚筒位于各上述刮板槽正上方时上述前滚筒的上述最优推进路径的确定工作,得到多条上述最优推进路径;在上述三维地质模型中,将所有的上述最优推进路径中属于同一刀的上述第二推进路径的起点依次连接,得到上述前滚筒的多条最优截割路径。该方法在待采煤层的三维地质模型中,根据前滚筒的高度调节范围和刮板槽的预设推进路径确定每刀中前滚筒的实际高度调节范围,然后,根据每刀中前滚筒的实际高度调节范围,确定前滚筒的可能的推进路径,即确定可选推进路径,之后,根据采煤作业要求,确定满足采煤作业要求的可选推进路径,即最优推进路径,最后,将所有最优推进路径中属于同一刀的第二推进路径的起点依次连接,得到前滚筒的多刀最优截割路径。该方法解决了现有技术中无法实现对前滚筒未来连续n刀截割路径进行整体优化的问题。
- 还没有人留言评论。精彩留言会获得点赞!