一种定位方法、定位装置及存储介质
本技术涉及定位,具体涉及一种定位方法、定位装置及存储介质。
背景技术:
1、视觉定位技术使用环境图像作为输入,查询数据库中与之匹配的图像,进而使用匹配到的图像的地理信息作为目标当前的地理信息,实现对目标的定位。然而,目标当前所处的环境可能存在季节、光照、天气等外观变化,使得当前获取的环境图像与数据库保存的图像存在很大差异,从而影响当前环境图像在数据库中进行匹配的结果,降低了目标定位的准确性。
技术实现思路
1、针对上述技术问题,本技术提供一种定位方法、定位装置及存储介质,通过采用基于中频信息增强的图像特征进行特征匹配,可以减少环境外观变化对特征匹配结果的影响,提高目标定位的准确性。
2、为解决上述技术问题,本技术提供一种定位方法,所述方法包括以下步骤:
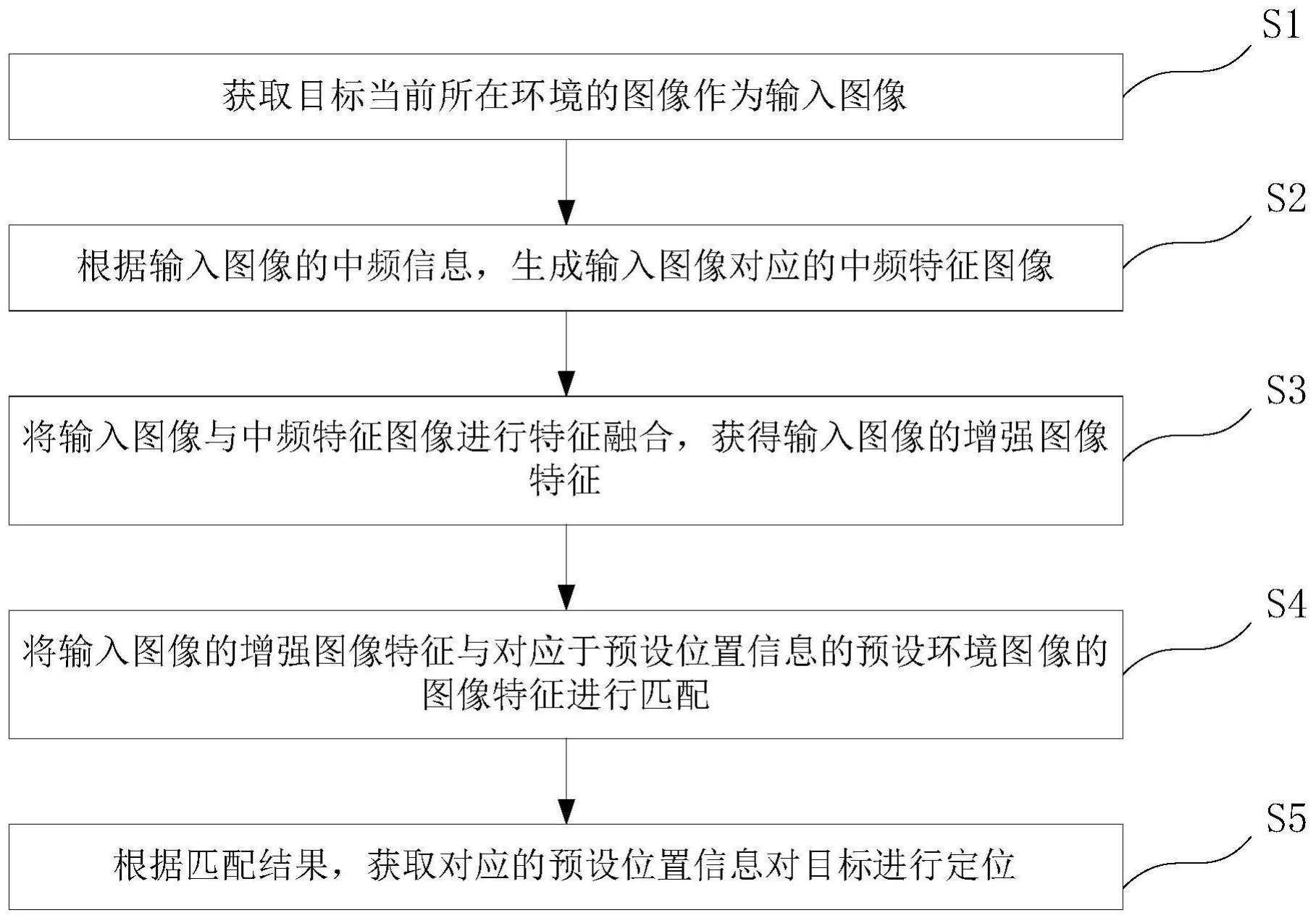
3、获取目标当前所在环境的图像作为输入图像;
4、根据所述输入图像的中频信息,生成所述输入图像对应的中频特征图像;
5、将所述输入图像与所述中频特征图像进行特征融合,获得所述输入图像的增强图像特征;
6、将所述输入图像的增强图像特征与对应于预设位置信息的预设环境图像的图像特征进行匹配;
7、根据匹配结果,获取对应的预设位置信息对所述目标进行定位。
8、可选地,所述根据所述输入图像的中频信息,生成所述输入图像对应的中频特征图像,包括:
9、对所述输入域图像进行从空间域到频率域的dct变换,以获取dct系数矩阵;
10、根据所述dct系数矩阵确定所述输入图像的中频信息在频率域中的上边界与下边界;
11、根据所述上边界、所述下边界、对应于所述上边界的掩膜尺寸基准参数及对应于所述下边界的掩膜尺寸基准参数,确定掩膜的范围;
12、根据所述掩膜的范围,生成用于将所述输入图像的中频信息所在的区域作为兴趣区的掩膜矩阵;
13、使用所述掩膜矩阵进行逆dct变换,得到所述输入图像对应的中频特征图像。
14、可选地,所述根据所述dct系数矩阵确定所述输入图像的中频信息在频率域中的上边界与下边界,包括:
15、将所述dct系数矩阵展开成向量并按顺序排列,所述向量为:
16、h=sort(flatten(d(u,v))),
17、其中,d(u,v)为所述dct系数矩阵;u和v分别表示频率域中的横向坐标和纵向坐标,u的取值范围为[0,m-1],v的取值范围为[0,n-1],m和n分别是所述输入图像的高度和宽度;
18、构造集合:
19、
20、其中,i和j分别表示所述dct系数矩阵的i行和j列;l(t)为所述向量中第t个元素在所述dct系数矩阵中对应的位置与d(0,0)之间的距离;h(t)为向量的第t个元素的值,t∈[1,n],n为向量的长度;
21、确定所述输入图像的中频信息在频率域中的上边界与下边界,其中,所述上边界表示为所述下边界表示为e为低频信息的频率区间的上限,f为高频信息的频率区间的下限。
22、可选地,所述方法,还包括:
23、计算所述集合的标准差;
24、所述根据所述上边界、所述下边界、对应于所述上边界的掩膜尺寸基准参数及对应于所述下边界的掩膜尺寸基准参数,确定掩膜的范围,包括:
25、根据所述上边界、所述下边界、所述标准差及对应于所述上边界的掩膜尺寸基准参数及对应于所述下边界的掩膜尺寸基准参数,确定掩膜的内径和外径,以得到掩膜的范围;
26、其中,所述内径为r=(α-c)*θ+ub,所述外径为r=(β-c)*θ+lb,其中,α为对应于所述上边界的掩膜尺寸基准参数,β为对应于所述上边界的掩膜尺寸基准参数,c为调节常数,c的取值大于0且小于或等于1,θ为标准差,ub为上边界,lb为下边界。
27、可选地,所述方法,还包括:
28、通过卷积神经网络对所述输入图像进行处理,得到第一特征向量;
29、将所述第一特征向量输入第一全连接层中进行线性变换,并经过第一激活函数进行非线性变换,得到第二特征向量;
30、将所述第二特征向量输入第二全连接层中进行线性变换,得到输出向量,所述输出向量∈r2;
31、通过第二激活函数对所述输出向量进行非线性变换,将所述输出向量映射到区间(0,1)中,得到对应于所述上边界的掩膜尺寸基准参数及对应于所述下边界的掩膜尺寸基准参数。
32、可选地,所述将所述输入图像与所述中频特征图像进行特征融合,获得所述输入图像的增强图像特征,包括:
33、将所述输入图像和所述中频特征图像输入卷积神经网络中,得到所述输入图像的第一卷积特征与所述中频特征图像的第二卷积特征;
34、将所述第一卷积特征与所述第二卷积特征进行拼接,得到第三特征向量;
35、将所述第三特征向量输入全连接神经网络,得到所述输入图像的增强图像特征。
36、可选地,所述方法,还包括:
37、获取同一预设位置的不同环境外观下的多个预设环境图像,以将多个预设位置的多个预设环境图像作为样本图像,所述样本图像包括锚点样本、与所述锚点样本对应的正样本以及与锚点样本对应的负样本;
38、根据所述样本图像的中频信息,生成所述样本图像对应的中频特征图像;
39、将所述样本图像与对应的中频特征图像进行特征融合,获得所述样本图像对应的增强图像特征;
40、使用所述样本图像对应的增强图像特征对所述第一全连接层、所述第二全连接层、所述全连接神经网络进行训练;
41、在损失函数符合预设条件时,停止训练。
42、可选地,所述损失函数包括第一损失函数、第二损失函数和第三损失函数;其中,
43、第一损失函数为:
44、ltri=max(||xa-xpos||2-||xa-xneg||2+m,0),
45、xa为锚点样本的增强图像特征;xpos为正样本的增强图像特征;xneg为负样本的增强图像特征;m为用于调节正样本与负样本在特征空间中的距离的超参数;
46、第二损失函数为:
47、
48、λ为用于平衡σk(1-ckk)2与这两项的重要性的常数;x为样本图像的增强图像特征,k和1分别表示x的ith和jth维度,p和q分别表示不同的样本图像;
49、第三损失函数为:
50、lreg=-log(minp≠q(||xp,xq||2)).。
51、本技术提供一种定位设备,包括存储介质与控制器,其中,所述存储介质上存储有定位程序,所述定位程序被所述控制器执行时实现如上任一所述的定位方法的步骤。
52、本技术提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一所述的定位方法的步骤。
53、本技术的定位方法、定位装置及存储介质,所述方法包括以下步骤:获取目标当前所在环境的图像作为输入图像;根据输入图像的中频信息,生成输入图像对应的中频特征图像;将输入图像与中频特征图像进行特征融合,获得输入图像的增强图像特征;将输入图像的增强图像特征与对应于预设位置信息的预设环境图像的图像特征进行匹配;根据匹配结果,获取对应的预设位置信息对目标进行定位。本技术技术方案,采用基于中频信息增强的图像特征进行特征匹配,可以减少环境外观变化对特征匹配结果的影响,提高目标定位的准确性。
- 还没有人留言评论。精彩留言会获得点赞!