一种基于改进YOLOv7的骑行者头盔实时监测方法和系统
本发明涉及计算机视觉应用,特别涉及一种基于改进yolov7的骑行者头盔实时监测方法和系统。
背景技术:
1、随着科技的发展,人们的出行越来越依靠各种交通工具,尤以在城市中多数人们选择电动车作为主要的交通工具,而电动车相较于其他大型车辆来说,交通事故比较容易发生,多数电动车骑行人员发生事故时受损伤部位都在头部,而佩戴安全头盔能极大的保护在安全事故发生时的头部安全。
2、目前,对电动车安全头盔佩戴实现自动检测与识别,当下比较流行的目标检测算法为yolov7,其速度快且稳定,但yolov7主干网络采用多分枝堆叠模块,模型大小为75m,网络模型较大,导致该算法在移动式嵌入式系统运行时速度大大降低,难以达到实时检测的效果。
3、而yolov7在进行网络训练时存在大量未对网络模型性能有贡献的权重参数、神经元和卷积层的通道,导致网络模型有大量的无效存储和计算量,yolov7使用了标准卷积(convolution),虽在一定程度上提高了检测精度,但其步骤多,冗余大等特点不适用于追求内存小,速度快的移动式嵌入式系统。
技术实现思路
1、本发明实施例提供一种基于改进yolov7的骑行者头盔实时监测方法和系统,对目标检测速度快且内存小,提高了在复杂路况环境下对骑行者安全头盔的检测效率。
2、本发明实施例提供一种基于改进yolov7的骑行者头盔实时监测方法,包括:
3、获取待识别的多幅骑行者图像;
4、将yolov7网络中的主干网络中的标准卷积替换为深度可分离卷积,得到dsc主干网络模块,并形成改进yolov7网络,采用训练后的改进yolov7网络中的dsc主干网络模型提取待识别的多幅骑行者图像中的图像特征,得到不同尺度卷积层的特征图;
5、在yolov7网络中引入ca注意力机制,并在训练后的改进yolov7网络中利用特征金字塔网络fpn将不同尺度卷积层的特征图进行多尺度融合;
6、采用训练后的改进yolov7网络中的标签网络yolo head对经过融合后的特征图进行回归预测,得到目标是否佩戴头盔。
7、优选地,所述待识别的多幅骑行者图像的预处理步骤,包括:
8、对待识别的多幅骑行者图像进行随机水平翻转、随机垂直翻转、尺度变换、裁剪和拼接操作。
9、优选地,所述将yolov7网络中的主干网络中的标准卷积替换为深度可分离卷积,包括:
10、当一个3×3大小的卷积层使用标准卷积时,需要32个3×3的卷积核来分别输入数据进行卷积,则共需要3×3×16×32=4608个参数;
11、当使用深度可分离卷积时,此卷积包含:逐通道卷积和逐点卷积;
12、在逐通道卷积时,对于3×3大小的卷积层,此时的参数量为144个参数;
13、在逐点卷积时,对于32个卷积核,共需要512个参数;
14、使用逐通道卷积和逐点卷积后,共需要656个参数;
15、在达到同样输出效果的情况下,将标准卷积替换为深度可分离卷积使得参数量减少。
16、优选地,所述得到不同尺度卷积层的特征图,包括:
17、将预处理后的图像进行不同尺度的缩放,形成图像金字塔;
18、利用yolov7网络中的dsc主干网络模型对每层图像提取不同尺度的颜色特征、纹理特征、形状特征和空间关系特征;
19、将每层图像提取到的颜色特征、纹理特征、形状特征和空间关系特征中的关键特征进行整合,形成不同尺度的特征层;
20、将得到的不同尺度的特征层,每一个特征层作为一个卷积层,形成不同尺度卷积层的特征图。
21、优选地,所述对不同尺度卷积层的特征图进行多尺度融合,包括:
22、在yolov7网络中引入ca注意力机制,将每一个特征图分为宽度和高度两个方向分别进行全局平均池化,分别获得在宽度和高度两个方向的特征图;
23、利用yolov7网络中的特征金字塔网络fpn将不同尺度卷积层的宽度和高度两个方向的特征图拼接在一起;
24、通过深度可分离卷积的逐通道卷积和逐点卷积融合在宽度和高度两个方向的特征图,形成融合后的特征图。
25、优选地,所述对经过融合后的特征图进行回归预测,包括:
26、对经过融合的特征图进行中心点预测,并利用回归预测的结果对特征图的中心点偏移进行计算,获得调整后的预测框;
27、判断预测框内含有的物体和含有物体的种类;
28、利用回归预测的结果计算预测框的宽度和高度,以确定预测框;
29、将确定好的预测框绘制在图片上并进行输出;
30、得到目标是否佩戴头盔的结果。
31、优选地,所述回归预测包括:
32、根据预测目标,确定因变量和自变量;
33、根据因变量和自变量的历史统计资料进行计算,在此基础上建立回归分析方程;
34、利用因变量和自变量进行相关分析,求出相关关系;
35、检验所确定的回归分析方程,且预测误差较小,才能将回归方程作为预测模型进行预测;
36、利用回归预测模型计算预测值,并对预测值进行综合分析,确定最后的预测值。
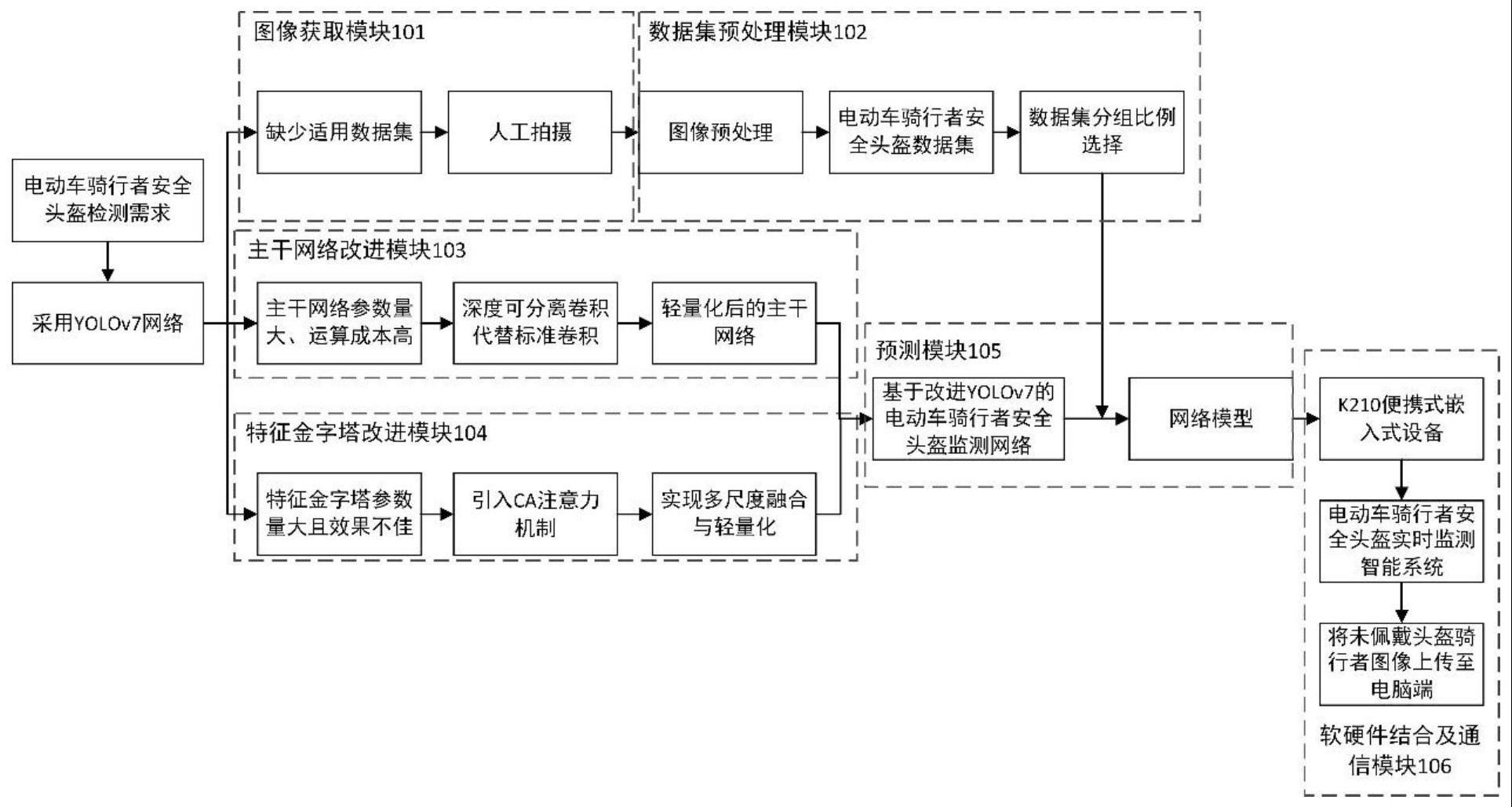
37、优选地,本发明实施例提供一种基于改进yolov7的骑行者头盔实时监测系统,包括:
38、图像获取模块,获取待识别的多幅骑行者图像;
39、主干网络改进模块,通过将yolov7网络中的主干网络中的标准卷积替换为深度可分离卷积,得到dsc主干网络模块,并形成改进yolov7网络,采用训练后的改进yolov7网络中的dsc主干网络模型提取待识别的多幅骑行者图像中的图像特征,得到不同尺度卷积层的特征图;
40、特征金字塔改进模块,通过在yolov7网络中引入ca注意力机制,并并在训练后的改进yolov7网络中利用特征金字塔网络fpn将不同尺度卷积层的特征图进行多尺度融合;
41、预测模块,采用训练后的改进yolov7网络中的标签网络yolo head对经过融合后的特征图进行回归预测,得到目标是否佩戴头盔。
42、优选地,还包括:
43、数据集预处理模块,将获取到的图像进行随机水平翻转、随机垂直翻转、尺度变换、裁剪和拼接操作预处理;
44、优选地,还包括:
45、软硬件结合及通讯模块,将训练过的yolov7网络模型嵌入到便携式嵌入式设备k210中实现实时检测目标,并将检测目标的信息传送到电脑端。
46、本发明实施例提供一种基于改进yolov7的骑行者头盔实时监测方法和系统,与现有技术相比,其有益效果如下:
47、本发明采用数据集分组比例实验,dsc深度可分离卷积和ca注意力机制等方式,对原yolov7网络进行改进,使其网络模型的内存变小、精度提高、速度变快;与便携嵌入式设备结合后,提高了在复杂路况环境下对骑行者安全头盔的检测效率,结合k210便携嵌入式设备的低廉价格和多功能性,改进yolov7的道路骑行者安全头盔实时监测智能系统应用前景广泛,市场需求潜力巨大。
- 还没有人留言评论。精彩留言会获得点赞!