一种基于插值和预测算法的车辆轨迹拟合仿真方法与流程
本发明涉及公路数字孪生车辆轨迹仿真预测,具体指一种基于插值和预测算法的车辆轨迹拟合仿真方法。
背景技术:
1、数字孪生交通(也称作平行交通或虚拟交通),是将实时采集的交通数据纳入到建立的交通模型体系中,实现对交通体系的虚拟数字映射,通过大数据分析、人工智能ai和交通仿真技术生成交通优化方案和对方案进行评价的一种方法。数字孪生交通是智慧交通的一部分。
2、digital twin数字孪生,是充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程。交通仿真是数字孪生技术在交通工程领域的一个重要应用。根据对交通系统仿真细节的程度的不同,通常又分为宏观仿真(即仿真交通流聚集性和宏观模型)、中观仿真(即仿真个别交通节点周边的车辆和交通设施的互动行为)和微观仿真(即仿真单个车辆的运动和路径)。
3、随着智能交通技术的发展,越来越多地需要进行道路交通的微观或者中观实时3d仿真,特别是根据交通设备采集到的交通数据,来进行车辆行驶轨迹的仿真。但是采样数据质量不高的问题,也日益突出,给仿真过程带来诸多困扰,具体问题如下:
4、一是数据采集设备在空间布设上过于离散,相邻设备距离间隔过远,导致中间存在数据盲区,数据采集区域不能完全覆盖到整个需要仿真的区域。
5、二是采集设备本身存在性能和精度方面不足,容易受到环境影响,导致采集到的数据出现缺漏或者差错,造成数据连续性出现问题。
6、三是个别采集设备灵敏度设备过高,易导致采集到的数据出现来回抖动情况。
7、由于以上种种原因,如果直接根据采样的数据进行仿真的话,会使得仿真车辆的行驶轨迹显得生硬违和,出现车辆位置异常跳变、莫名其妙的加减速、诡异的转向、以及来回抖动等问题。
技术实现思路
1、为了解决现有技术在采样数据质量较差的情况下进行数字孪生仿真时失真问题,提出一种基于插值和预测算法的车辆轨迹拟合仿真方法,根据已采集到的交通数据,针对不同的区域,通过算法建立不同模型并进行路径点的拟合计算,从而使得车辆的仿真轨迹显得更为逼真流畅。
2、一种基于插值和预测算法的车辆轨迹拟合仿真方法,
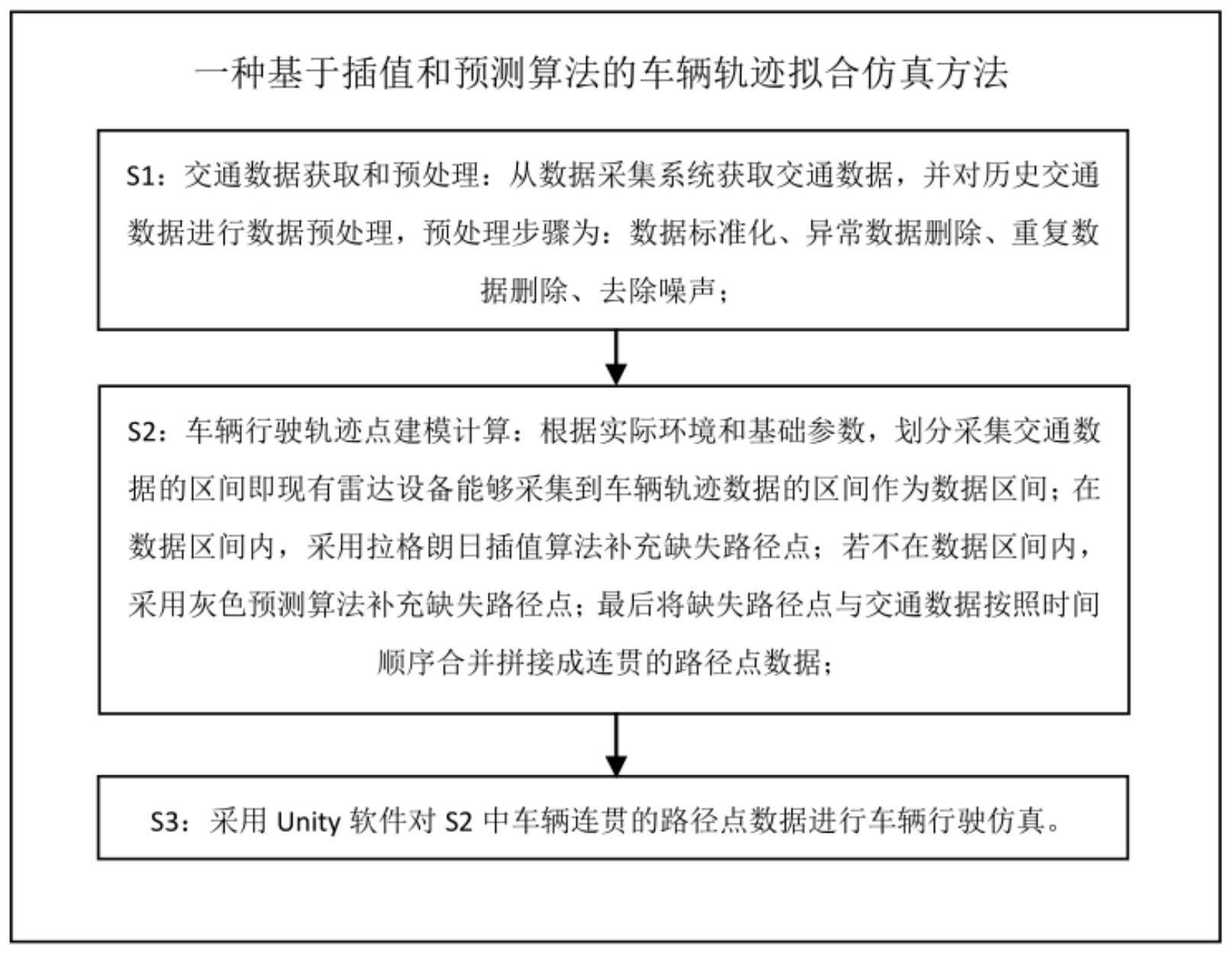
3、s1:交通数据获取和预处理:从数据采集系统获取交通数据,并对历史交通数据进行数据预处理,预处理步骤为:数据标准化、异常数据删除、重复数据删除、去除噪声;
4、s2:车辆行驶轨迹点建模计算:根据实际环境和基础参数,划分采集交通数据的区间;在数据区间内,采用拉格朗日插值算法补充缺失路径点;若不在数据区间内,采用灰色预测算法补充缺失路径点;最后将缺失路径点与交通数据按照时间顺序合并拼接成连贯的路径点数据;
5、s3:采用unity软件对s2中车辆连贯的路径点数据进行车辆行驶仿真。
6、s1中去除噪声的方法为:对于交通数据中的雷达数据,采用卡尔曼滤波函数削弱噪声,得到平滑的雷达数据,通过unity中插件kalman.cs来实现。
7、s2中采用拉格朗日插值算法补充缺失路径点的方法为:
8、s21:确定交通数据流的平面上的n个数据点(x0,y0)、(x1,y1)、......(xn-1,yn-1);
9、s22:建立模型,作函数f(x)使其图像经过这n个点,得到拉格朗日插值多项式;
10、设集合dn={0,1,...,n-1},作n个多项式pj(x),j∈dn。对于任意ε∈dn,都有pk(x),bk={i|i≠k,i∈dn},使得是一个n-1次多项式,且满足pk(xm)=0并且pk(xk)=1;
11、最后可得拉格朗日插值多项式:
12、
13、s23:根据s22得到的拉格朗日插值多项式表示交通数据流的轨迹,在交通数据流轨迹上选取需补充的缺失路径点。
14、s2中采用灰色预测算法补充缺失路径点的方法为:
15、a1:根据采样路径点数据序列x(0)=(x(0)(1),x(0)(2),...,x(0)(n))建立gm(1,1)模型;
16、a2:对采样路径点数据序列进行级比检验,未通过级比检验则对序列曲线进行平移变换,直到通过通过级比检验得到新序列y(0)(k);
17、a3:级比检验通过后利用新数列y(0)(k)构造累加序列;
18、a4:得到的一次累加生成序列及由该一次累加生成序列得到的均值生成序列建立gm(1,1)的白微分方程;用微分方程拟合新序列得到灰微分方程:d(k)+az(1)(k)=b;
19、a5:利用最小二乘法求灰微分方程的未知参数并预测缺失路径点数据;
20、a6:进行残差检验。
21、a2中对采样数据进行级比检验的方法为:
22、a21:求级比λ(0)(k):
23、
24、a22:获得gm模型的原始数据:如果所有的级比λ(0)(k)均落在则数列x(0)是可以作为gm模型的原始数据;如果不满足,则需要对数据做处理,取常数c,做平移变换,即沿着y方向增大c,得到y(0)(k);
25、y(0)(k)=x(0)(k)+c,k=1,2,3,...,n (3)
26、对新数列y(0)(k)再进行校验,直到级比均落在
27、a23:得到新数列y(0)(k);
28、
29、
30、此时的新数列为:y(0)(k)。
31、a3中在级比检验通过后利用新数列y(0)(k)构造累加序列的方法为:
32、对原始数列k=α,α+1,...n进行累加,得到数列y(1)=(y(1)(1),y(1)(2),...,y(1)(n)),其中α≤n,且为正整数。
33、a4中用微分方程拟合新序列的方法为:
34、a41:求y(1)的灰导数:
35、d(k)=y(0)(k)=y(1)(k)-y(1)(k-1) (6)
36、a42:取y(1)的等权重紧邻值:
37、z(1)(k)=0.5y(1)(k)+0.5y(1)(k-1),k=2,3,...,n (7)
38、a43:则灰微分方程gm(1,1)为:
39、d(k)+az(1)(k)=b (8)
40、其中,a为发展导数,z(1)(k)为白化背景值,b为灰作用量。
41、a5中利用最小二乘法求所述灰微分方程gm(1,1):d(k)+az(1)(k)=b的未知参数a,b的方法为:
42、将y(0)(k),z(1)(k),k=2,3,...,n的数据带入方程(9)求未知参数a,b;:
43、
44、矩阵形式为:
45、y=(y(0)(2),y(0)(3),...,y(0)(n),)t,
46、然后使用最小二乘法求解未知数解为:
47、
48、即求得
49、a6中获得gm(1,1)模型的白微分方程并预测缺失路径点数据的方法为:
50、a61:求白微分方程:如果将y(0)(k)的时刻k=2,3,...n视为连续的变量t,则数列y(1)就可以视为时间t的函数,并让灰导数y(0)(k)对应于导数背景值z(1)(k)对应于y(1)(t),于是对应的白微分方程为:
51、
52、a62:预测缺失路径点数据
53、通过将gm(1,1)的白微分方程离散,得到y(1)的预测值
54、
55、
56、y(1)是由y(0)累加得到的,因此可以通过累减即公式(13)得到y(0)的预测值
57、a7中对进行残差检验的方法为:
58、令残差ε(k)为:
59、如果所有ε(k)均小于0.2,则认为gm(1,1)模型可行。
60、与现有技术相比,采用本发明具有以下的技术效果:
61、1、仿真的真实性更高
62、因为在原始数据基础上通过拉格朗日插值算法和灰色预测算法结合对数据进行了数学加工处理,使得车辆行驶轨迹更为圆润和合理,避免了出现车辆位置出现异常跳变、莫名其妙的加减速、诡异的转向、以及来回抖动等情况,仿真效果更加逼真。具体通过在s1步骤对交通数据进行预处理,在s2步骤将预处理的数据分成两个区间,在数据区间内,即可以用雷达采集到部分数据的位置,雷达可能5秒、10秒才采集一次,或者路上车太多的时候应答不过来,对具体某一个车来说,间隔可能是不固定的,这是一个不稳定的数据。采用拉格朗日插值算法补充缺失路径点;若不在数据区间内,即现有的公路采集雷达不能覆盖的位置,采用灰色预测算法预测车在这一段里每一秒的具体位置,从而补充缺失路径点,把整个范围内的每一段,都这样处理一遍,然后一段一段按时间顺序拼接起来,就能完整的知道这个车在每一秒的具体位置,从而得到的车辆位置的路径点更均匀,更合理有效的预测车辆行驶情况。
63、2、对硬件设备和环境的要求低
64、本方法可以在采集设备布点较少,性能略差的设备环境下,利用s2步骤的拉格朗日插值算法和灰色预测算法对原始采样数据进行处理后再仿真展示,对可以减少对采集设备的依赖性,在实际工程应用中可以降低成本。
65、3、时间复杂度和空间复杂度可以接受
66、拉格朗日插值算法的时间复杂度为o(n2),灰色预测算法的时间复杂度也是o(n2)。虽然属于复杂度比较大的算法,但是车辆行驶轨迹的仿真一般是在中观和微观仿真场景中才用到,采样数据本身的数据规模并不是非常庞大,所以实际计算开销尚在能够接受的范围内,该方法可以在仿真系统中应用。
- 还没有人留言评论。精彩留言会获得点赞!