车载激光雷达仿真模型评估方法、装置及计算机设备与流程
本发明涉及智能汽车仿真测试,具体涉及车载激光雷达仿真模型评估方法、装置及计算机设备。
背景技术:
1、激光雷达通过向目标发送激光束,获取目标相对距离、速度、角度等信息,已然成为了智能汽车感知系统中的重要组成部分,用于探测汽车行驶环境并支撑决策控制系统完成动静态驾驶任务。同时,激光雷达感知技术仍处于发展探索阶段,为降低测试验证成本,需要通过仿真手段对智能驾驶系统在上车前进行充分验证。
2、目前,行业聚焦激光雷达硬件测评方法,行业中已有相关团体发布了激光雷达硬件测评标准。但在激光雷达仿真模型测评方面,现有的激光雷达仿真模型测评方法并未考虑到智能汽车在仿真阶段对于激光雷达仿真模型拟真度的不同要求,以及评价指标维度上未覆盖激光雷达传感器实际应用场景。
技术实现思路
1、有鉴于此,本发明提供了一种车载激光雷达仿真模型评估方法、装置及计算机设备,以解决现有的激光雷达仿真模型测评方法未考虑到智能汽车在仿真阶段对于激光雷达仿真模型拟真度的不同要求,评价指标维度上未覆盖激光雷达传感器实际应用场景,难以满足智能驾驶系统研发验证需求现状的问题。
2、第一方面,本发明提供了一种车载激光雷达仿真模型评估方法,所述方法包括:
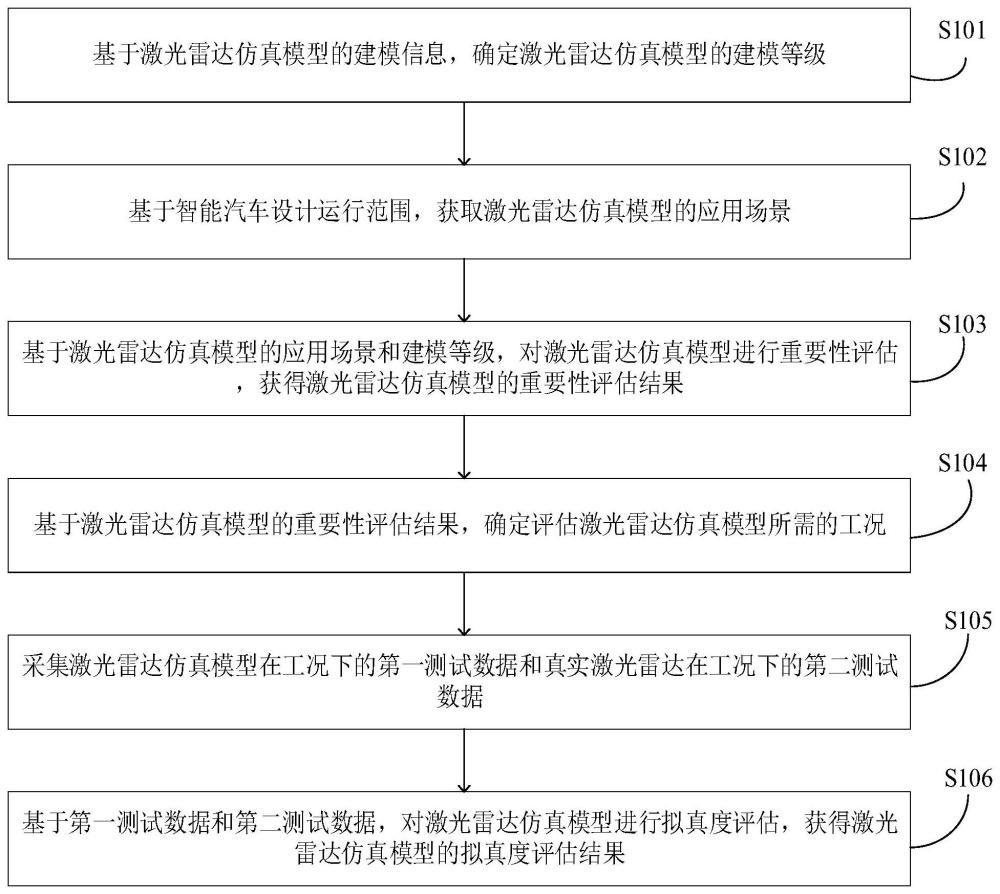
3、基于激光雷达仿真模型的建模信息,确定所述激光雷达仿真模型的建模等级;
4、基于智能汽车设计运行范围,获取所述激光雷达仿真模型的应用场景;
5、基于所述激光雷达仿真模型的应用场景和建模等级,对所述激光雷达仿真模型进行重要性评估,获得所述激光雷达仿真模型的重要性评估结果;
6、基于所述激光雷达仿真模型的重要性评估结果,确定评估所述激光雷达仿真模型所需的工况;
7、采集所述激光雷达仿真模型在所述工况下的第一测试数据和真实激光雷达在所述工况下的第二测试数据;
8、基于所述第一测试数据和第二测试数据,对所述激光雷达仿真模型进行拟真度评估,获得所述激光雷达仿真模型的拟真度评估结果。
9、本技术实施例通过基于激光雷达仿真模型的应用场景和建模等级,对激光雷达仿真模型进行重要性评估,评价维度覆盖了激光雷达传感器实际应用场景,且考虑到智能汽车在仿真阶段对于激光雷达仿真模型拟真度的不同要求,根据激光雷达模型拟真度的不同要求选取不同的测试工况,进行激光雷达仿真模型的拟真度评估,满足了智能驾驶系统研发验证需求现状。
10、在一种可选的实施方式中,所述基于激光雷达仿真模型的建模信息,确定所述激光雷达仿真模型的建模等级,包括:
11、基于所述激光雷达仿真模型的建模方式和模型输出,确定所述激光雷达仿真模型的建模等级。
12、在一种可选的实施方式中,所述基于所述激光雷达仿真模型的建模方式和模型输出,确定所述激光雷达仿真模型的建模等级,包括:
13、在所述激光雷达仿真模型的建模方式为麦克斯韦方程组,模型输出为原生数据的情况下,确定所述激光雷达仿真模型的建模等级为高等级建模;
14、在所述激光雷达仿真模型的建模方式为黑盒模型,模型输出为探测列表的情况下,确定所述激光雷达仿真模型的建模等级为中等级建模;
15、在所述激光雷达仿真模型的建模方式为真值列表,模型输出为目标列表的情况下,确定所述激光雷达仿真模型的建模等级为低等级建模。
16、在一种可选的实施方式中,所述基于所述激光雷达仿真模型的应用场景和建模等级,对所述激光雷达仿真模型进行重要性评估,获得所述激光雷达仿真模型的重要性评估结果,包括:
17、根据所述激光雷达仿真模型的应用场景,确定所述激光雷达仿真模型的应用场景对于仿真测试结果的影响程度;
18、将所述激光雷达仿真模型的建模等级和所述激光雷达仿真模型的应用场景对于仿真测试结果的影响程度输入重要性评估矩阵,获得所述激光雷达仿真模型的重要性评估结果。
19、本技术实施例对激光雷达仿真模型进行重要性评估,评价维度覆盖了激光雷达传感器实际应用场景,且考虑到智能汽车在仿真阶段对于激光雷达仿真模型拟真度的不同要求,满足了智能驾驶系统研发验证需求现状。
20、在一种可选的实施方式中,所述基于所述激光雷达仿真模型的重要性评估结果,确定评估所述激光雷达仿真模型所需的工况,包括:
21、在所述激光雷达仿真模型的重要性评估结果为拟真度高要求的情况下,确定评估所述激光雷达仿真模型所需的工况为激光雷达性能维度工况、点云质量维度工况和应用场景表现维度工况;
22、在所述激光雷达仿真模型的重要性评估结果为拟真度中等要求的情况下,确定评估所述激光雷达仿真模型所需的工况为激光雷达性能维度工况;
23、在所述激光雷达仿真模型的重要性评估结果为拟真度低要求的情况下,确定所述激光雷达仿真模型无需进行拟真度评估。
24、本技术实施例根据激光雷达模型拟真度的不同要求选取不同的测试工况,进行激光雷达仿真模型的拟真度评估,满足了智能驾驶系统研发验证需求现状。
25、在一种可选的实施方式中,所述基于所述第一测试数据和第二测试数据,对所述激光雷达仿真模型进行拟真度评估,获得所述激光雷达仿真模型的拟真度评估结果,包括:
26、确定第一测试数据与第二测试数据之间的偏差值;
27、在所述偏差值在预设范围内的情况下,确定所述激光雷达仿真模型的拟真度评估结果为拟真度良好。
28、在一种可选的实施方式中,所述方法还包括:
29、在所述偏差值未在预设范围内的情况下,确定所述激光雷达仿真模型的拟真度评估结果为未达到预期。
30、第二方面,本发明提供了一种车载激光雷达仿真模型评估装置,所述装置包括:
31、建模等级确定模块,用于基于激光雷达仿真模型的建模信息,确定所述激光雷达仿真模型的建模等级;
32、应用场景获取模块,用于基于智能汽车设计运行范围,获取所述激光雷达仿真模型的应用场景;
33、重要性评估结果获取模块,用于基于所述激光雷达仿真模型的应用场景和建模等级,对所述激光雷达仿真模型进行重要性评估,获得所述激光雷达仿真模型的重要性评估结果;
34、工况确定模块,用于基于所述激光雷达仿真模型的重要性评估结果,确定评估所述激光雷达仿真模型所需的工况;
35、测试数据采集模块,用于采集所述激光雷达仿真模型在所述工况下的第一测试数据和真实激光雷达在所述工况下的第二测试数据;
36、拟真度评估结果获取模块,用于基于所述第一测试数据和第二测试数据,对所述激光雷达仿真模型进行拟真度评估,获得所述激光雷达仿真模型的拟真度评估结果。
37、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的车载激光雷达仿真模型评估方法。
38、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的车载激光雷达仿真模型评估方法。
- 还没有人留言评论。精彩留言会获得点赞!