使用道路表面数据的同步定位与地图构建的制作方法
背景技术:
1、车辆可以配备全球定位系统来定位道路上的车辆。全球定位系统控制系统可以从卫星接收指示卫星位置的信号。全球定位系统可以计算距卫星的距离以便确定车辆的粗略位置。
技术实现思路
1、本技术解决方案涉及使用道路表面数据的同步定位与地图构建的系统、方法和设备。由于定位车辆的位置的技术挑战,车辆的定位系统可能由于卫星信号延迟、车辆加速度和速度的改变以及卫星信号的接收而提供车辆的不准确或过时的位置数据。另外,基于卫星定位系统的位置分辨率可能不足以满足某些高级驾驶员辅助系统和应用程序的需求。本技术解决方案,通过生成实时道路谱(road profile)数据并将其与先前记录的道路谱数据进行匹配,可提高确定车辆位置的精度。这些道路谱数据可由车辆基于所记录的道路高度信息或车辆高度信息而生成。实际上,车辆可在车辆的全球定位系统(“gps”)(例如,导航系统)不能接收卫星信号或信号可能会发生折射或反射的区域中行进。例如,车辆的导航系统可在进入隧道之前接收指示车辆的位置的卫星信号。一旦进入隧道,卫星信号就可能无法到达车辆,因此可能无法经由导航系统确定车辆的位置。因此,如果仅依赖来自卫星信号的位置信息,那么车辆的位置可能会不准确、延迟或完全受损。
2、本技术解决方案的系统、方法和设备提供道路谱生成和地图绘制来改进车辆的定位。例如,通过将预期道路谱(例如,至少一个车辆的一个或多个先前生成的道路谱)与每一车辆生成的实况经重构道路谱(例如,实况道路谱或当前道路谱)进行比较和匹配,车辆可定位自身位置。实际上,车辆可基于与道路上的位置相关联的历史道路谱而确定自身位置。可由每一车辆的数据处理系统(“dps”)执行定位。车辆可包含用以接收恒定信号(例如,标称速度下的车辆运动)的一个或多个传感器。车辆可至少包含指纹生成器(例如,道路谱生成器)、实况缓冲器(例如,域转换器)、地图管理器和定位引擎(例如,地形比较器)。车辆可生成仅取决于道路的恒定信号。车辆可将数据从时域数据转换为距离域数据。时域数据可被称作时间域,距离域数据可被称作空间域。车辆可检索或加载包含预期地标(例如,指纹片段)与其在道路上的相关联位置的集合的地图数据。地图管理器可将对应于车辆的所估计位置的地标发送到地形比较器。因此,车辆可将道路谱生成器生成的当前道路谱与同地标相关联的历史道路谱进行比较。因此,通过将与道路上的某一位置相关联的当前道路谱与历史道路谱进行比较,在一些情况下车辆可定位自身位置,而无需依赖于外部信号来计算车辆的位置,进而减少更新车辆位置的延迟,提高定位准确性,并且减少计算能力和资源消耗。
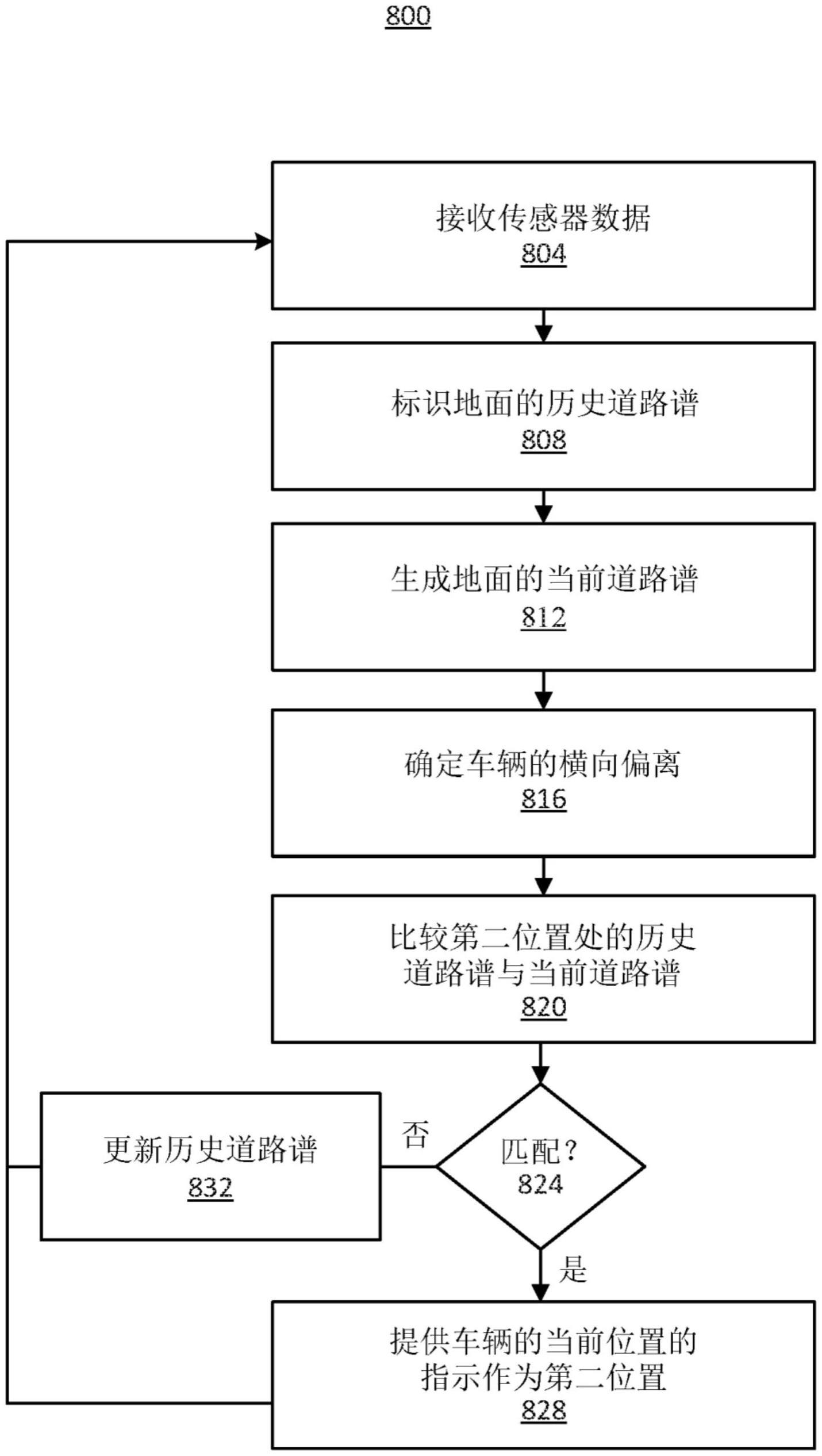
3、至少一个方面涉及一种用以定位车辆的系统。所述车辆可包含数据处理系统,其包含一个或多个处理器和存储器。所述数据处理系统可经由所述车辆上的一个或多个传感器接收传感器数据,其包括指示所述车辆的主体与所述车辆所移动的地面之间的垂直位移的多个垂直位移信号。所述数据处理系统可针对所述车辆的第一位置标识所述地面的历史道路谱,其指示在包含所述第一位置的多个位置处所述车辆的所述主体与所述地面之间的垂直位移。所述数据处理系统可基于包括所述多个垂直位移信号的所述传感器数据而生成所述地面的当前道路谱。所述数据处理系统可基于经由所述一个或多个传感器接收到的横向位移数据而确定所述车辆的横向偏离。所述数据处理系统可确定所述第一位置之后的与所述横向偏离对准的第二位置处所述历史道路谱与所述当前道路谱之间的匹配。所述数据处理系统可响应于所述匹配,提供所述车辆的当前位置的指示作为存储在所述历史道路谱中的与所述横向偏离对准的所述第二位置。
4、所述数据处理系统可经由所述车辆上的缓冲器使用以下各项将所述当前道路谱从所述时间域转换到所述空间域:(i)所述当前道路谱的所述多个垂直位移信号,(ii)对应于所述多个垂直位移信号的多个时间戳,以及(iii)经由所述一个或多个传感器接收到的所述车辆的纵向速度数据。所述数据处理系统可响应于将所述当前道路谱从所述时间域转换到所述空间域,将与所述横向偏离对准的所述第二位置处的所述历史道路谱与所述空间域中的所述当前道路谱进行比较以确定所述匹配。所述一个或多个传感器可包含:惯性测量单元(“imu”),其位于所述车辆的纵向轴线的远端、近端或所述远端与所述近端之间;多个距离传感器,其与所述imu一起位于所述车辆的横向轴线上;以及位置传感器,其中所述传感器数据可包含纵向速度数据、垂直速度数据和角速度数据。
5、所述数据处理系统可基于所述纵向速度数据、所述垂直速度数据和所述角速度数据而生成所述地面的所述当前道路谱。所述数据处理系统可基于位置数据而确定所述车辆的所述第一位置。所述一个或多个传感器可包含位于所述车辆的每一悬架的顶部和底部的多个加速度传感器。所述数据处理系统可经由所述多个加速度传感器确定所述车辆的悬架动态数据。所述数据处理系统可基于所述车辆的所述悬架动态数据而归一化所述当前道路谱的所述多个垂直位移信号。所述数据处理系统可将与所述横向偏离对准的所述第二位置处的所述历史道路谱的所述历史垂直位移与所述当前道路谱的归一化垂直位移信号进行比较。所述传感器数据进一步包含进一步用以生成所述当前道路谱的横摇角速度数据和俯仰角速度数据。
6、所述数据处理系统可将与所述纵向速度数据相关联的所述垂直速度数据和所述角速度数据归一化到预定速度。所述数据处理系统可基于包含所述纵向速度数据、归一化到所述预定速度的所述垂直速度数据、归一化到所述预定速度的所述角速度数据和所述多个垂直位移信号的所述传感器数据而生成所述地面的所述当前道路谱。所述数据处理系统可基于从所述一个或多个传感器接收到的所述车辆的位置数据而确定所述车辆的轨迹。所述数据处理系统可基于所述车辆的所述第一位置和所述车辆的所述轨迹而确定所述车辆接近对应于所述多个位置的多个地标。所述数据处理系统可经由地图管理器检索所述地面的包括所述多个地标的所述历史道路谱,所述历史道路谱和所述多个地标由多个车辆使用第二传感器数据生成。
7、所述数据处理系统可响应于确定所述历史道路谱与所述当前道路谱之间的所述匹配,将所述车辆的包括所述位置索引和所述车道标识符的所述当前位置的所述指示提供到所述车辆的界面以使得所述界面显示所述车辆位于所述当前位置和所述车道。所述数据处理系统可使用从所述车辆的所述一个或多个传感器接收到的纵向速度数据来确定所述车辆距所述当前位置的行进距离,所述行进距离指示所述车辆接近距所述第一地标所述预定距离的所述第二地标。所述数据处理系统可将所述第二地标处的所述历史道路谱的所述历史垂直位移提供到所述车辆的控制器,以使得所述控制器基于所述第二地标处的所述历史道路谱的所述历史垂直位移而控制所述车辆的组件。所述数据处理系统可响应于所述车辆位于距与第一地标相关联的所述当前位置所述预定距离处,生成与从所述一个或多个传感器接收到的第二多个垂直位移信号相关联的第二地标,所述第二地标位于所述当前位置之后的所述预定距离处。所述数据处理系统可使用所述第二地标处的所述第二多个垂直位移信号来更新具有所述第二地标的所述多个地标和所述第二地标处的所述历史道路谱的所述历史垂直位移。
8、所述数据处理系统可将与所述横向偏离对准的所述第一地标处的所述历史道路谱的所述历史垂直位移与所述当前道路谱的所述多个垂直位移信号进行比较。所述数据处理系统可确定指示与所述横向偏离对准的所述第一地标处所述历史道路谱与所述当前道路谱之间的相似性的得分。所述数据处理系统可响应于所述得分满足相似性阈值,使用在所述第一地标处接收到的所述多个垂直位移信号更新所述第一地标处的所述历史道路谱的所述历史垂直位移;或响应于所述得分不满足所述相似性阈值,从所述历史道路谱的所述多个地标中删除所述第一地标。所述数据处理系统可在离线状态下向所述车辆的界面提供所述车辆的所述当前位置的所述指示作为所述第二位置。
9、至少一个方面涉及一种控制车辆的组件的方法。所述方法可由包含数据处理系统的所述车辆执行,所述数据处理系统包含一个或多个处理器和存储器。所述方法可包含经由所述车辆上的一个或多个传感器接收传感器数据,其包括指示所述车辆的主体与所述车辆所移动的地面之间的垂直位移的多个垂直位移信号。所述方法可包含针对所述车辆的第一位置标识所述地面的历史道路谱,其指示在包含所述第一位置的多个位置处所述车辆的所述主体与所述地面之间的垂直位移。所述方法可包含基于包括所述多个垂直位移信号的所述传感器数据而生成所述地面的当前道路谱。所述方法可包含基于经由所述一个或多个传感器接收到的横向位移数据而确定所述车辆的横向偏离。所述方法可包含确定所述第一位置之后的与所述横向偏离对准的第二位置处所述历史道路谱与所述当前道路谱之间的匹配。所述方法可包含响应于所述匹配而提供所述车辆的当前位置的指示作为存储在所述历史道路谱中的与所述横向偏离对准的所述第二位置。
10、所述方法可包含经由所述车辆上的缓冲器使用以下各项将所述当前道路谱从所述时间域转换到所述空间域:(i)所述当前道路谱的所述多个垂直位移信号,(ii)对应于所述多个垂直位移信号的多个时间戳,以及(iii)经由所述一个或多个传感器接收到的所述车辆的纵向速度数据。所述方法可包含响应于将所述当前道路谱从所述时间域转换到所述空间域,将与所述横向偏离对准的所述第二位置处的所述历史道路谱与所述空间域中的所述当前道路谱进行比较以确定所述匹配。所述一个或多个传感器可包含:惯性测量单元(“imu”),其位于所述车辆的纵向轴线的远端、近端或所述远端与所述近端之间;多个距离传感器,其与所述imu一起位于所述车辆的横向轴线上;以及位置传感器,其中所述传感器数据可包含纵向速度数据、垂直速度数据和角速度数据。
11、所述方法可包含基于所述纵向速度数据、所述垂直速度数据和所述角速度数据而生成所述地面的所述当前道路谱。所述方法可包含基于位置数据而确定所述车辆的所述第一位置。所述一个或多个传感器可包含位于所述车辆的每一悬架的顶部和底部的多个加速度传感器。所述方法可包含经由所述多个加速度传感器确定所述车辆的悬架动态数据。所述方法可包含基于所述车辆的所述悬架动态数据而归一化所述当前道路谱的所述多个垂直位移信号。所述方法可包含将与所述横向偏离对准的所述第二位置处的所述历史道路谱的所述历史垂直位移与所述当前道路谱的归一化垂直位移信号进行比较。所述传感器数据进一步包含进一步用以生成所述当前道路谱的横摇角速度数据和俯仰角速度数据。
12、所述方法可包含将与所述纵向速度数据相关联的所述垂直速度数据和所述角速度数据归一化到预定速度。所述方法可包含基于包含所述纵向速度数据、归一化到所述预定速度的所述垂直速度数据、归一化到所述预定速度的所述角速度数据和所述多个垂直位移信号的所述传感器数据而生成所述地面的所述当前道路谱。所述方法可包含基于从所述一个或多个传感器接收到的所述车辆的位置数据而确定所述车辆的轨迹。所述方法可包含基于所述车辆的所述第一位置和所述车辆的所述轨迹而确定所述车辆接近对应于所述多个位置的多个地标。所述方法可包含经由地图管理器检索所述地面的包括所述多个地标的所述历史道路谱,所述历史道路谱和所述多个地标由多个车辆使用第二传感器数据生成。
13、所述方法可包含响应于确定所述历史道路谱与所述当前道路谱之间的所述匹配,将所述车辆的包括所述位置索引和所述车道标识符的所述当前位置的所述指示提供到所述车辆的界面以使得所述界面显示所述车辆位于所述当前位置和所述车道。所述方法可包含使用从所述车辆的所述一个或多个传感器接收到的纵向速度数据确定所述车辆距所述当前位置的行进距离,所述行进距离指示所述车辆接近距所述第一地标所述预定距离处的所述第二地标。所述方法可包含将所述第二地标处的所述历史道路谱的所述历史垂直位移提供到所述车辆的控制器,以使得所述控制器基于所述第二地标处的所述历史道路谱的所述历史垂直位移而控制所述车辆的组件。所述方法可包含响应于所述车辆位于距与第一地标相关联的所述当前位置所述预定距离处,生成与从所述一个或多个传感器接收到的第二多个垂直位移信号相关联的第二地标,所述第二地标位于所述当前位置之后的所述预定距离处。所述方法可包含使用所述第二地标处的所述第二多个垂直位移信号来更新具有所述第二地标的所述多个地标和所述第二地标处的所述历史道路谱的所述历史垂直位移。
14、所述方法可包含将与所述横向偏离对准的所述第一地标处的所述历史道路谱的所述历史垂直位移与所述当前道路谱的所述多个垂直位移信号进行比较。所述方法可包含确定指示与所述横向偏离对准的所述第一地标处所述历史道路谱与所述当前道路谱之间的相似性的得分。所述方法可包含响应于所述得分满足相似性阈值,使用在所述第一地标处接收到的所述多个垂直位移信号更新所述第一地标处的所述历史道路谱的所述历史垂直位移;或响应于所述得分不满足所述相似性阈值,从所述历史道路谱的所述多个地标中删除所述第一地标。所述方法可包含在离线状态下向所述车辆的界面提供所述车辆的所述当前位置的所述指示作为所述第二位置。
15、这些和其它方面以及实施方案在下文详细论述。前述信息和以下详细描述包含各个方面和实施方案的说明性实例,并且提供了用于理解所要求保护的方面和实施方案的性质和特征的概述或框架。附图提供了对各个方面和实施方案的说明和另外的理解,并且并入本说明书中并构成本说明书的一部分。
- 还没有人留言评论。精彩留言会获得点赞!