一种基于CMAC-PID的DVD光学头控制系统
一种基于cmac-pid的dvd光学头控制系统
技术领域
1.本发明涉及激光加工控制领域,特别涉及基于cmac-pid的dvd光学头控制系统。
背景技术:
2.随着科技的迅猛发展和人们对信息存储容量的需求的增大,近年来光盘存储技术产品和市场蓬勃发展,人们期望光存储技术有新的提高和突破。另外,随着现代计算机速度的迅速提高,对信息存储密度的要求也越来越高。因此需要发展超高密度光存储技术。以双光子吸收技术为基础的三维数据存储技术以其特有的三维处理能力和极高的空间分辨本领而显示出变革性的应用潜力,已成为高密度信息存储领域最热门的研究方向之一。
3.三维数据存储的工作原理是利用飞秒激光诱导光敏材料发生的局域光化学反应(光还原、光聚合和光解离等过程),利用扫描系统使这一过程在一定空间范围内选择性地发生,通过相应的后处理工艺实现二进制信息的存储。由于材料发生双光子吸收的几率与激发光强度的平方成正比,由双光子吸收引发的光化学反应将被局域在激光强度很高的焦点周围极小的区域内,可实现很高的空间分辨。作为一种新型的数据存储技术,与传统的光存储技术相比,它可以实现三维的数据存储和读写。
4.1989年,california大学irvine分校的rentzepis等用双光子技术在光致变色材料上记录成功读写一次的三维数据,层内比特间距和层间距离分别高达30μm和80μm。1991年,webb等用单波长单光束产生双光子的方法,在光致聚合物上成功地记录了10层,使层内比特间距和层间间距分别降到1μm和3μm。1998年y.kawata等人用钛蓝宝石激光输出的762nm脉冲激光,在无掺杂铌酸锂晶体中实现了双光子激发的三维数据存储,信息密度可达33gbits/cm3。2005年,日本takita akihiro等人在生物组织中用飞秒激光存储三维数据,可达到信息密度为3.6gbits/cm3。2006年,中国科学技术大学黄文浩等人采用双光子写入单光子共焦读出的方法分别在光致漂白、光致变色和微爆材料中成功存储和读出了三维数据。
5.目前双光子三维信息存储尚停留在实验室中利用精密三维平台移动来实现数据写入读出的阶段,没有实现在光盘进行三维信息存储。
6.为了使三维光存储技术的应用化水平得到提高,如何实现以dvd伺服技术、双光子吸收技术为基础组建了一套信息存储系统是一个有待解决的技术问题。
技术实现要素:
7.针对背景技术中提到的问题,本发明的目的是提供一种基于cmac-pid的dvd光学头控制系统,以dvd伺服技术、双光子吸收技术为基础组建了一套信息存储系统,采用一种新算法即cmac与pid的复合控制算法,通过cmac神经网络的局部学习能力和非线性逼近能力,保证系统的响应速度;通过pid的反馈控制,保证系统的稳定性并抑制扰动。
8.本发明的上述技术目的是通过以下技术方案得以实现的:一种基于cmac-pid的dvd光学头控制方法,包括如下步骤:
9.步骤一、建立量化模块、地址映射模块、cmac记忆模块、cmac函数计算模块、pid算法模块和光学头系统,阶跃信号通过量化模块和地址映射模块的映射后,进入cmac记忆模块,通过学习算法结合cmac记忆模块后进行cmac函数的计算得到un(k);
10.步骤二、初始化dvd光学头控制系统的输出信号与输入信号的差值为零,选取合适的pid算法的比例、积分、微分参数;
11.步骤三、计算阶跃信号通过pid控制后的输出u
p
(k);
12.步骤四、计算光学头系统的总控制输入u(k)=un(k)+u
p
(k);
13.步骤五、通过梯度下降算法,对cmac的权重进行修正,计算在此前提下当输入为阶跃信号时,dvd光学头系统的输出响应;
14.步骤六、不断重复步骤一、步骤三、步骤四和步骤五,直至使pid控制后的输出u
p
(k)为零,即dvd光学头系统的总控制输入只由cmac产生的输出控制量决定。
15.作为优选,所述光学头系统采用三洋公司sf-hd60光学头。
16.作为优选,其中cmac算法模块算法包括如下步骤:
17.1)设定控制的输入与输出:cmac神经网络模型输入为设定值rin,输出为un;二次型单神经元pid的输入为误差e,即控制输入rin与输出测量值yout的差,二次型单神经元pid的输出为u
p
;u为控制器总输出;
18.2)确定cmac神经网络以及单神经元网络参数:cmac神经网络参数:维数n,泛化参数c,网络学习速率η,惯性量α;单神经元网络参数:比例系数k;输出误差的加权系数p;控制增量的加权系数q;比例、积分、微分三部分加权系数学习速率分别取为η
p
,ηi,ηd;pid三个参数的初始化值w
p
,wi,wd;
19.3)确定cmac神经网络以及单神经元网络性能指标:
20.cmac的调整指标为:
[0021][0022][0023]
w(k)=w(k-1)+δw(k)+α(w(k)-w(k-1))
[0024]
二次型单神经元性能指标:rin(k),rin(k)和yout(k)为k时刻的参考输入和输出;
[0025]
4)分别计算cmac神经网络输出以及二次型单神经元pid控制输出
[0026]
5)控制系统总输出为u=u
p
+un。
[0027]
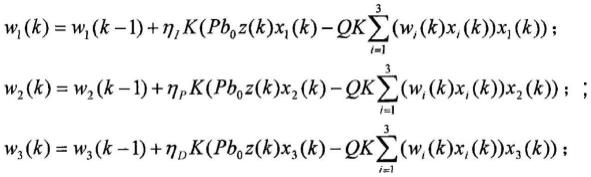
作为优选,所述单神经元控制输出:其中,wi(k)(i=1,2,3)为加权系数,
[0028][0029]
式中,x1(k)=e(k);x2(k)=e(k)-e(k-1);x3(k)=e(k)-2e(k-1)+e(k-2);z(k)=e(k);b0=yout(1)。
[0030]
综上所述,本发明主要具有以下有益效果:本发明充分利用cmac神经网络的局部学习能力和非线性逼近能力、pid的反馈控制,构建dvd光学头控制系统的仿真模型,通过采用cmac-pid复合控制算法,大大提高了dvd光学头系统的响应速度,并使系统的超调量大大减小,较好地达到了系统性能指标的要求。
附图说明
[0031]
图1是本发明的cmac神经网络结构的结构示意图;
[0032]
图2是本发明的cmac-pid复合控制系统的系统示意图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
本发明的基于cmac-pid的dvd光学头控制系统主要由两部分组成:
[0035]
(1)经典的pid控制器;该控制器实现反馈控制,保证dvd光学头系统的稳定性,且抑制扰动。
[0036]
(2)cmac神经网络辨识。小脑模型神经控制器实现前馈控制,实现dvd光学头系统的逆动态模型。cmac采用有导师的学习算法。每一控制周期结束时,计算出响应的cmac输出un(k),并与总控制输入u(k)相比较,修正权重,进入学习过程。学习的目的是使总控制输入与cmac的输出之差最小。经过cmac的学习,使系统的总控制输入由cmac产生。
[0037]
dvd光学头是dvd光盘机的核心部件,它借助光盘反射光的光强、相位等特征产生伺服系统所需要的各种误差信号,从而读取光盘中所存储的各类数据信息。本实验采用的光学头为三洋公司的sf-hd60光学头。根据其使用手册和dvd光学读取头的音圈电机的电气模型,经推导计算得到dvd光学读取头聚焦致动器的传递函数。
[0038]
2.cmac-pid算法在dvd光学头控制系统的设计应用
[0039]
(1)取阶跃信号作为cmac的输入,通过概念映射、实际映射,得到cmac网络的输出un(k);
[0040]
(2)初始化整个dvd光学头控制系统的输出信号与输入信号的差值为零,选取合适的pid算法的比例、积分、微分参数;
[0041]
(3)计算阶跃信号通过pid控制后的输出u
p
(k);
[0042]
(4)计算光学头系统的总控制输入u(k)=un(k)+u
p
(k);
[0043]
(5)通过梯度下降算法,对cmac的权重进行修正,计算在此前提下当输入为阶跃信号时,dvd光学头系统的输出响应;
[0044]
(6)不断重复(1)、(3)、(4)、(5),直至使pid控制后的输出u
p
(k)为零,即dvd光学头系统的总控制输入只由cmac产生的输出控制量决定。
[0045]
其中cmac算法模块算法包括如下步骤:
[0046]
1)设定控制的输入与输出:cmac神经网络模型输入为设定值rin,输出为un;二次型单神经元pid的输入为误差e,即控制输入rin与输出测量值yout的差,二次型单神经元pid的输出为u
p
;u为控制器总输出;
[0047]
2)确定cmac神经网络以及单神经元网络参数:cmac神经网络参数:维数n,泛化参数c,网络学习速率η,惯性量α;单神经元网络参数:比例系数k;输出误差的加权系数p;控制增量的加权系数q;比例、积分、微分三部分加权系数学习速率分别取为η
p
,ηi,ηd;pid三个参数的初始化值w
p
,wi,wd;
[0048]
3)确定cmac神经网络以及单神经元网络性能指标:
[0049]
cmac的调整指标为:
[0050][0051][0052]
w(k)=w(k-1)+δw(k)+α(w(k)-w(k-i))
[0053]
二次型单神经元性能指标:rin(k),rin(k)和yout(k)为k时刻的参考输入和输出;
[0054]
4)分别计算cmac神经网络输出以及二次型单神经元pid控制输出
[0055]
5)控制系统总输出为u=u
p
+un。
[0056]
所述单神经元控制输出:
[0057]
其中,wi(k)(i=1,2,3)为加权系数,
[0058][0059]
式中,x1(k)=e(k);x2(k)=e(k)-e(k-1);x3(k)=e(k)-2e(k-1)+e(k-2);z(k)=e(k);b0=yout(1)。
[0060]
充分利用cmac神经网络的局部学习能力和非线性逼近能力、pid的反馈控制,构建
dvd光学头控制系统的仿真模型,通过采用cmac-pid复合控制算法,大大提高了dvd光学头系统的响应速度,并使系统的超调量大大减小,较好地达到了系统性能指标的要求。
[0061]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1