基板搬运机器人以及靶体的边缘位置示教方法与流程
1.本发明涉及在基板搬运机器人中,利用设置于基板保持手的光电传感器来示教基板的边缘位置的技术。
背景技术:
2.以往,公知有在基板保持手的末端部具备透射型的光电传感器的基板搬运机器人。该光电传感器例如为了检测收纳在基板载具的各插槽中的基板的有无而使用。光电传感器除了该原本的用途之外,还为了对基板搬运机器人自动示教基板、其载置部的位置而使用。在专利文献1中,公开有这种技术。
3.在专利文献1中,公开有如下内容:将沿上下排列具有与半导体晶片相同的外径的大圆板部、和与大圆板部共用中心轴的小圆板部而成的示教用夹具,设置在设置半导体晶片的位置,并利用设置于晶片把持部的末端部的透射式传感器检测该示教用夹具,由此自动示教半导体晶片的位置。
4.专利文献1所公开的小圆板部的定位方法如下。即,(1)通过作业者的操作使晶片把持部向小圆板部之上移动,(2)使晶片把持部下降,利用透射式传感器检测小圆板部的上表面,并记录此时的机器人的z轴的坐标值,(3)使晶片把持部下降,用透射式传感器检测小圆板部的下表面,并记录此时的机器人的z轴的坐标值,(4)将晶片把持部的高度设定在小圆板部的上表面与下表面的中间,(5)将臂收缩至透射式传感器无法检测小圆板部的位置为止,(6)改变晶片把持部的朝向,使晶片把持部缓慢地接近小圆板部,记录透射式传感器最早检测到小圆板部(即,透射式传感器的光轴与小圆板部的圆周接触)时的机器人的θ轴和r轴的坐标,(7)反复进行上述(5)和(6),使晶片把持部从不同的方向接近小圆板部,求出多组光轴与小圆板部的圆周接触时的机器人的θ轴和r轴的坐标,并根据这些值,求出小圆板部的中心的位置并记录。
5.专利文献1:国际公开wo2003/022534
6.根据上述专利文献1的技术,为了检测光电传感器的光轴与圆形基板的边缘(圆周)接触时的机器人的位置,首先,使光轴沿z轴移动来检测基板的上表面和下表面,由此确定基板的上表面和下表面的z轴的位置,接下来,将基板的z轴的位置设定在基板的上表面的z轴的位置与下表面的z轴的位置的中间,并在基板的z轴的位置使光轴在与z轴正交的平面内移动而检测基板的边缘。这样,为了确定真正需要的基板的在与z轴正交的平面内的位置,必须进行确定基板的z轴的位置的前阶段,处理需要时间。另外,为了确定基板的z轴的位置,模拟基板的示教用夹具需要具有相当大的厚度,而难以在实际的基板中应用。
技术实现要素:
7.本发明是鉴于上述情况而完成的,其目的在于,提出一种对具备保持基板的手、使该手位移的机器人臂、以及设置于手的末端部的光电传感器的基板搬运机器人示教板状的靶体的边缘的位置的技术,无论板状的靶体的厚度如何,都能够对机器人示教靶体的边缘
的位置。
8.本发明的一个形态所涉及的靶体的边缘位置示教方法,是对具备保持基板的手、使该手位移的机器人臂、以及设置于上述手的末端部的光电传感器的基板搬运机器人,示教板状的靶体的边缘的位置的方法,其中,包含:
9.使上述光电传感器的光轴向规定的初始位置移动,该规定的初始位置规定在比以主面成为水平的姿势设置的上述靶体的边缘靠外侧、且比上述靶体靠上方或下方的位置;
10.直到由上述光电传感器检测到上述靶体的边缘为止,反复进行上述光轴的规定的前进循环;以及
11.基于在由上述光电传感器检测到上述靶体的边缘时的上述基板搬运机器人的姿势,求出上述靶体的边缘的被检测点的位置,并存储该位置,
12.上述前进循环包含:通过上述靶体的高度位面进行上升或下降、向朝向上述靶体的水平的规定的扫描方向前进规定的第一移动量、通过上述靶体的高度位面进行下降或上升、以及向上述扫描方向前进上述第一移动量的一系列的移动。
13.本发明的一个形态所涉及的基板搬运机器人具备:机器人主体,其具有保持基板的手、使上述手位移的机器人臂、以及设置于上述手的末端部的光电传感器;和控制器,其具有存储边缘位置示教程序的存储器、以及执行上述边缘位置示教程序的处理器。
14.上述边缘位置示教程序构成为,
15.上述控制器使上述机器人主体动作,以使得上述光电传感器的光轴向规定的初始位置移动,该规定的初始位置规定在比以主面成为水平的姿势设置的板状的靶体的边缘靠外侧、且比上述靶体靠上方或下方的位置,
16.使上述机器人主体动作,以直到由上述光电传感器检测到上述靶体的边缘为止,反复进行上述光轴的规定的前进循环,
17.基于在由上述光电传感器检测到上述靶体的边缘时的上述机器人主体的姿势,求出上述靶体的边缘的被检测点的位置,并存储该位置,
18.上述前进循环包含:通过上述靶体的高度位面进行上升或下降、向朝向上述靶体的水平的规定的扫描方向前进规定的第一移动量、通过上述靶体的高度位面进行下降或上升、以及向上述扫描方向前进上述第一移动量的一系列的移动。
19.根据上述基板搬运机器人以及靶体的边缘位置示教方法,在反复进行光轴的移动的循环的过程中检测出靶体的边缘的上下方向以及水平方向的位置,因此不存在确定靶体的上下方向的位置(即,厚度方向的位置)的前阶段。因此,通过省略该前阶段的处理,能够缩短处理所需要的时间。另外,通过省略该前阶段的处理,使得靶体的厚度不受限定。
20.根据本发明,能够提供对具备保持基板的手、使该手位移的机器人臂、以及设置于手的末端部的光电传感器的基板搬运机器人示教板状的靶体的边缘的位置的技术,无论板状的靶体的厚度如何,都能够对机器人示教靶体的边缘的位置。
附图说明
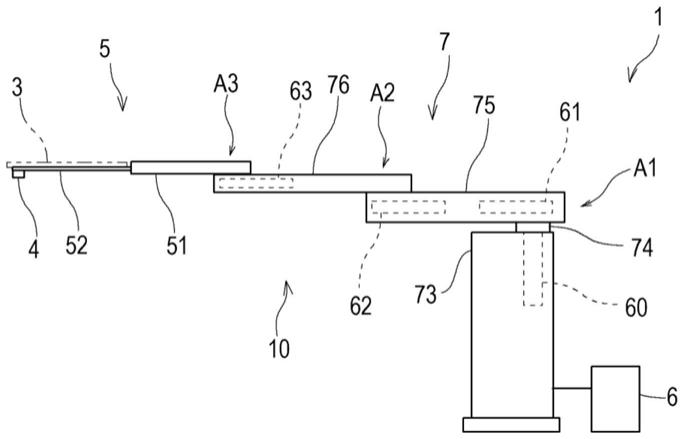
21.图1是本发明的一个实施方式所涉及的基板搬运机器人的简要侧视图。
22.图2是基板保持手的俯视图。
23.图3是表示基板搬运机器人的控制系统的结构的框图。
24.图4是说明靶体的边缘位置示教方法的图。
25.图5是靶体的边缘位置示教处理的流程图。
26.图6是说明靶体的边缘位置示教方法的图。
具体实施方式
27.〔基板搬运机器人1的简要结构〕
28.图1是本发明的一个实施方式所涉及的基板搬运机器人1的简要侧视图,图2是图1所示的基板搬运机器人1所具备的手5的俯视图。图1以及图2所示的基板搬运机器人1具备机器人主体10、和控制机器人主体10的动作的控制器6。基板搬运机器人1用于对未图示的基板载置部进行基板3的搬入(装载)以及搬出。也可以在例如efem(equipment front end module:设备前端模块)、分类器、基板处理系统等搬运各种基板3的系统中具备基板搬运机器人1。
29.〔机器人主体10的结构〕
30.机器人主体10具有:基台73;水平多关节型机器人臂(以下称为“臂7”),其支承于基台73;基板保持手(以下,称为“手5”),其与臂7的末端连接设置;以及透射式的光电传感器4,其设置于手5。此外,在本实施方式中,作为光电传感器4,采用透射式的光电传感器,但也可以代替该透射式的光电传感器而采用回归反射型的光电传感器。
31.臂7具备支承于基台73的升降轴74、和沿水平方向延伸的第一连杆75以及第二连杆76。第一连杆75的基端与升降轴74的末端经由第一关节a1而连结。第一连杆75的末端与第二连杆76的基端经由第二关节a2而连结。第二连杆76的末端与手5的基端经由手腕关节a3而连结。在基台73内设置有驱动升降轴74升降的升降驱动装置60。升降驱动装置60例如包含:伺服马达,其按照从控制器6给予的信号进行角位移;动力传递机构,其包含减速装置,将伺服马达的动力转换为前进力并向升降轴74传递;以及位置检测器,其检测伺服马达的角位移(均省略图示)。在第一连杆75内设置有驱动第一关节a1的第一关节驱动装置61、以及驱动第二关节a2的第二关节驱动装置62。在第二连杆76内设置有驱动手腕关节a3的手腕关节驱动装置63(参照图3)。各关节的驱动装置61、62、63包含:伺服马达,其按照从控制器6给予的信号进行角位移;动力传递机构,其包含减速装置,将伺服马达的动力传递到连杆体;以及位置检测器,其检测伺服马达的角位移(均省略图示)。
32.手5具备:经由手腕关节a3而与臂7的末端连结的手基部51、和与手基部51结合的托板52。托板52是末端部分成两岔的呈y字状(或u字状)的薄板部件。托板52的主面是水平的,支承基板3的多个支承垫53、54设置于托板52上。多个支承垫53、54配置为与载置于托板52的基板3的边缘接触。并且,在手5中,在托板52的基端侧设置有通过气缸64的动作而进行进退移动的推杆55。在该推杆55与配置于托板52的末端部的支承垫53之间,把持载置于托板52的基板3。此外,本实施方式所涉及的手5的基板3的保持方式虽然是边缘把持式,但也可以代替边缘把持式,而采用吸附式、落入式以及载置式等公知的基板3的保持方式。
33.在手5至少设置有一组光电传感器4。光电传感器4设置于托板52的分成两岔的末端部的背面。光电传感器4包含设置于托板52的分成二两岔的末端部的一方的投光器41、和设置于另一方的受光器42。投光器41和受光器42在与托板52的主面平行的方向(即,水平方向)上分离。
34.投光器41具备投射成为检测介质的光的光源。受光器42具备接受投光器41的投射光并转换为电信号的受光元件。投光器41与受光器42相对配置,从投光器41中射出的光以直线状行进,入射到受光器42的入光窗。在图2中,用点划线表示从投光器41射出的光的光轴43。若光电传感器4检测到物体经过光轴43上而入射到受光器42的光量减少,则将检测信号向控制器6输出。
35.〔基板搬运机器人1的控制系统的结构〕
36.图3是表示基板搬运机器人1的控制系统的结构的框图。控制器6是所谓的计算机,例如具有微型控制器、cpu、mpu、plc、dsp、asic或fpga等处理器66、以及rom、ram等存储器67。在存储器67中存储有包含边缘位置示教程序70的处理器66所执行的程序。另外,在存储器67储存有在处理器66所进行的处理中所使用的包含初始位置、第一移动量、第二移动量、基板3(靶体30)的形状以及基板3的大致的载置位置等设定数据、以及示教点数据等在内的各种数据等。
37.在控制器6中,处理器66读出并执行存储于存储器67的程序等软件,由此进行用于控制机器人主体10的动作的处理。此外,控制器6既可以通过由单一的计算机进行的集中控制来执行各处理,也可以通过基于多个计算机的配合进行的分散控制来执行各处理。
38.更详细而言,控制器6与升降驱动装置60、第一关节驱动装置61、第二关节驱动装置62、手腕关节驱动装置63以及光电传感器4电连接。控制器6从这些驱动装置所包含的位置检测器取得伺服马达的旋转位置,并基于与这些旋转位置对应的手5的姿态(位置以及姿势)和所存储的示教点数据,运算目标姿态。并且,控制器6向伺服放大器输出控制指令,使得手5成为目标姿态。伺服放大器基于控制指令对各伺服马达供给驱动电力,由此手5向目标姿态移动。
39.〔靶体30的边缘位置示教方法〕
40.以下,使用图4以及图5对由上述结构的基板搬运机器人1进行的靶体30的边缘位置示教方法进行说明。图4是说明靶体30的边缘位置示教方法的图,图5是靶体30的边缘位置示教处理的流程图。在控制器6中,通过由处理器66执行边缘位置示教程序70,从而由基板搬运机器人1进行与靶体30的边缘位置示教相关的处理。
41.如图4所示,板状的靶体30以其主面成为水平的姿势放置在设置于手5的光电传感器4的光轴43的末端。靶体30既可以载置于任意的示教用夹具,也可以收容于载具等收容体。另外,靶体30可以是基板3或模仿基板3的圆板状的构件,靶体30的外形并不限定于圆形。
42.首先,控制器6使机器人主体10动作,使得光电传感器4的光轴43(手5)向初始位置移动(步骤s1)。初始位置是如下所述的任意的位置:光电传感器4的光轴43不与基板3接触,光轴43在比靶体30的边缘靠外侧的位置与该边缘接近,且光轴43位于比靶体30靠下方(或上方)的位置。既可以以使手5向预先示教的初始位置移动的方式使机器人主体10动作,也可以以通过操作人员的远隔操作使手5向任意的初始位置移动的方式使机器人主体10动作。
43.接着,控制器6使机器人主体10进行检测动作(步骤s2)。在检测动作中,控制器6使机器人主体10动作,以将接下来的(1)~(4)一系列的移动作为一个前进循环,直到由光电传感器4检测到靶体30的边缘为止,使光轴43(手5)反复进行该前进循环。此外,初始位置也
可以设定为在进行一次以上的该前进循环后检测出靶体30的边缘。
44.(a1)通过靶体30的高度位面进行上升(或下降),
45.(a2)向朝向靶体30的水平的规定的扫描方向前进规定的第一移动量,
46.(a3)通过靶体30的高度位面进行下降(或上升),
47.(a4)向朝向靶体30的扫描方向前进第一移动量。
48.在上述中,“靶体30的高度位面”可以是预先存储于控制器6的靶体30的大致的高度位置。另外,在上述中,所谓靶体30的“扫描方向”是指从初始位置朝向靶体30的大致中心位置的任意的水平方向。控制器6既可以根据所存储的初始位置的坐标和靶体30的大致中心位置的坐标决定扫描方向,也可以将扫描方向预先存储于控制器6。另外,在上述中,“第一移动量”是任意的极小的值。上述(a2)的第一移动量和上述(a4)的第一移动量在原则上是相同的值,但它们也可以是不同的值。反复进行上述的前进循环的手5(或光轴43)的动作例如是狗来回嗅的动作。
49.在光轴43(手5)反复进行上述的前进循环的过程中,通过光电传感器4检测出靶体30的边缘。控制器6取得并存储在通过光电传感器4检测到靶体30的边缘时的(步骤s3为是)机器人主体10的姿势(由各位置检测器检测到的旋转位置)(步骤s4),根据这些值求出靶体30的边缘的被检测点的位置并记录(步骤s5)。
50.通过以上步骤s1~s5的处理,能够对基板搬运机器人1自动示教靶体30的边缘的位置,但若进一步增加以下说明的步骤s6以后的处理,则能够对基板搬运机器人1自动示教可靠性更高且详细的靶体30的边缘的位置。
51.控制器6使机器人主体10动作,使得光轴43从在步骤s5存储的靶体30的边缘的位置向扫描方向前进规定量、且使光轴43向比靶体30靠下方(或上方)的位置移动(步骤s6)。这里,上述“规定量”是在使移动后的手5上升或下降时手5不与靶体30抵接、且光轴43在靶体30通过那样的手5(或者光轴43)的移动量,预先存储于控制器6。
52.接着,控制器6使机器人主体10进行检测动作(步骤s7)。在该检测动作中,如图6所示,控制器6使机器人主体10动作,以将接下来的(b1)~(b4)的一系列的移动作为一个后退循环,直到变得无法由光电传感器4检测到靶体30的边缘为止,使光轴43(手5)反复进行该后退循环。此外,上述的规定量也可以设定为变得在进行一次以上的该后退循环后无法检测出靶体30的边缘。
53.(b1)通过靶体30的高度位面进行上升(或下降),
54.(b2)以接近靶体30的边缘的方式向扫描方向后退规定的第二移动量,
55.(b3)通过靶体30的高度位面进行下降(或上升),
56.(b4)以接近靶体30的边缘的方式向扫描方向后退第二移动量。
57.在上述中,“后退”的方向是与上述的“前进”的方向相反的方向。另外,在上述中,“第二移动量”是和第一移动量相同或比第一移动量小的任意的极小的值。第二移动量优选为比第一移动量小的值。上述(b2)的第二移动量和上述(b4)的第二移动量在原则上是相同的值,但它们也可以是不同的值。
58.在光轴43(手5)反复进行上述后退循环的过程中,变得无法通过光电传感器4检测出靶30的边缘。控制器6取得并存储变得无法通过光电传感器4检测到靶体30的边缘时的(步骤s8为是)机器人主体10的姿势(由各位置检测器检测到的旋转位置)(步骤s9),根据这
些值求出靶体30的边缘的第二次的被检测点的位置并记录(步骤s10)。
59.在靶体30的边缘的第一次的被检测点的位置与靶体30的边缘的第二次的被检测点的位置相同的情况下,控制器6将第一次(或,第二次)的被检测点的位置作为靶体30的边缘的位置示教。另外,在靶体30的边缘的第一次的被检测点的位置与靶体30的边缘的第二次的被检测点的位置不同的情况下,控制器6可以在使光轴43在扫描方向上进一步后退之后,反复进行步骤s2~s5,来求出靶体30的边缘的第三次的被检测点的位置。在该情况下,也可以在控制器6每反复一次检测动作(步骤s2、s7),就缩小一次前进或后退的移动量。
60.根据以上处理,能够对基板搬运机器人1自动示教靶体30的边缘的位置。应用该靶体30的边缘的位置示教方法,能够对基板搬运机器人1示教圆形的基板3的中心位置。具体而言,能够利用靶体30的边缘的位置示教方法,在基板3的三处以上的不同的边缘检测位置,并根据这些位置通过运算求出基板3的中心位置。
61.如以上说明那样,本实施方式所涉及的基板搬运机器人1具备:机器人主体10,其具备保持基板3的手5、使手5位移的机器人臂7、以及设置于手5的末端部的光电传感器4;和控制器6,其具有存储有边缘位置示教程序70的存储器67、以及执行边缘位置示教程序70的处理器66。边缘位置示教程序70构成为,控制器6使机器人主体10动作,以使得光电传感器4的光轴43向规定的初始位置移动,该规定的初始位置规定在比以主面成为水平的姿势设置的板状的靶体30的边缘靠外侧、且比靶体30靠上方或下方的位置;使机器人主体10动作,以直到用光电传感器4检测到靶体30的边缘为止,反复进行光轴43的规定的前进循环;基于在利用光电传感器4检测到靶体30的边缘时的机器人主体10的姿势,求出靶体30的边缘的位置,并存储该位置。前进循环包括:通过靶体30的高度位面进行上升或下降、向朝向靶体30的水平的规定的扫描方向前进规定的第一移动量、通过靶体30的高度位面进行下降或上升、以及向扫描方向前进第一移动量的一系列的移动。
62.另外,本实施方式的靶体的边缘位置示教方法是对基板搬运机器人1示教板状的靶体30的边缘位置的方法,包含:使光电传感器4的光轴43向规定的初始位置移动,该规定的初始位置规定在比以主面成为水平的姿势设置的靶体30的边缘靠外侧、且比靶体30靠上方或下方的位置;直到由光电传感器4检测到靶体30的边缘为止,反复进行光轴43的规定的前进循环;以及基于在由光电传感器4检测到靶体30的边缘时的基板搬运机器人1的姿势,求出靶体30的边缘的位置,并存储该位置。前进循环包含:通过靶体30的高度位面进行上升或下降、向朝向靶体30的水平的规定的扫描方向前进规定的第一移动量、通过靶体30的高度位面进行下降或上升、以及向扫描方向前进第一移动量的一系列的移动。
63.根据上述基板搬运机器人1以及靶体的边缘位置示教方法,由于在反复进行光轴43的移动循环的过程中检测到靶体30的边缘的上下方向以及水平方向的位置,因此不存在确定靶体30的上下方向的位置(即,厚度方向的位置)的前阶段。因此,通过省略该前阶段的处理,能够缩短处理所需要的时间。另外,通过省略该前阶段的处理,使得靶体30的厚度不受限定。
64.另外,如上述实施方式所示,在上述基板搬运机器人1中,边缘位置示教程序70也可以构成为:控制器6使机器人主体10动作,以在由光电传感器4检测到靶体30的边缘后,使光轴43向扫描方向前进规定量;使机器人主体10动作,以直到变得无法由光电传感器4检测到靶体30的边缘为止,反复进行光轴43的规定的后退循环;基于变得无法由光电传感器4检
测到靶体30的边缘时的机器人主体10的姿势,求出靶体30的边缘的位置,并存储该位置。在该情况下,后退循环包含:通过靶体30的高度位面进行上升或下降、向扫描方向后退规定的第二移动量、通过靶体30的高度位面进行下降或上升、以及向扫描方向后退第二移动量的一系列的移动。
65.同样,如上述实施方式那样,在上述边缘位置示教方法中,还可以包含:在由光电传感器4检测到靶体30的边缘后,使光轴43向扫描方向前进规定量,之后直到变得无法由光电传感器4检测到靶体30的边缘为止,反复进行光轴43的规定的后退循环;基于变得无法由光电传感器4检测到靶体30的边缘时的基板搬运机器人1的姿势,求出靶体30的边缘的位置,并存储该位置。在该情况下,后退循环包含:通过靶体30的高度位面进行上升或下降、向扫描方向后退规定的第二移动量、通过靶体30的高度位面进行下降或上升、以及向扫描方向后退第二移动量的一系列的移动。
66.根据上述基板搬运机器人1以及靶体30的边缘位置示教方法,对靶体30的边缘的相同部位进行多次检测。由此,能够提高检测到的靶体30的边缘位置的可靠度。
67.另外,在上述基板搬运机器人1以及靶体30的边缘位置示教方法中,优选为第二移动量比第一移动量小。
68.由此,能够以更精细的精度检测靶体30的边缘位置。
69.以上,虽然对本发明的优选的实施方式进行了说明,但在不脱离本发明的思想的范围内对上述实施方式的具体结构以及/或功能的细节进行变更的内容也包含在本发明中。
70.附图标记说明
71.1...基板搬运机器人;3...基板;10...机器人主体;30...靶体;4...光电传感器;41...投光器;42...受光器;43...光轴;5...手;51...手基部;52...托板;6...控制器;60...升降驱动装置;61...第一关节驱动装置;62...第二关节驱动装置;63...手腕关节驱动装置;64...气缸;66...处理器;67...存储器;70...边缘位置示教程序;73...基台;74...升降轴;75...第一连杆;76...第二连杆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1