一种铁芯硅钢片生产用自动收集装置的制作方法
1.本实用新型涉及硅钢片生产技术领域,尤其涉及一种铁芯硅钢片生产用自动收集装置。
背景技术:
2.硅钢片主要用来制作各种变压器、电动机和发电机的铁芯。世界硅钢片产量约占钢材总量的1%。硅钢片在加工时,钢带通过输送线进行输送,在输送过程中经过多个钢带横剪机进行冲压,最后经过输送线运送到收集区进行收集,收集时硅钢带掉落到平台上,硅钢带的前后和左右均无矫正机构,堆叠好的硅钢带不整齐,影响后续叠片工作。
技术实现要素:
3.本实用新型所要解决的技术问题,是针对上述存在的技术不足,提供了一种铁芯硅钢片生产用自动收集装置,包括所述托架左侧下方设置有角度调整板,所述托架两侧下方设置有挡板,所述导向键块一端和挡板固定,另一端转轴连接有连接杆,所述连接杆另一端和丝套转轴连接,当硅钢片切割后输送到收集区时,角度调整板的设置可将硅钢片的左侧矫正对齐,当锁紧螺杆转动时会推动两侧挡板向中部合并,可通过两侧的挡板将堆垛好的硅钢片向中部集中矫正,硅钢片在长度和宽度方向进行矫正,堆垛好的硅钢片比较整齐,方便后续叠片工作;堆垛完成后伺服电机驱动托板下降,当托盘运动到输送线上时翻转爪自动打开,在托板上的硅钢片经输送线运送到下一工序。
4.为解决上述技术问题,本实用新型所采用的技术方案是:包括横剪机、输送线和托板,其特征在于:所述输送线上固定设置有钢片自动收集装置;所述托板设置在钢片自动收集装置内部下方;所述钢片自动收集装置包括支撑座、托架、伺服电机和锁紧螺杆;所述支撑座固定设置在输送线上方;所述伺服电机固定设置在支撑座顶部;伺服电机下方设置有丝杆和悬座;所述悬座和支撑座之间设置有导向组件;所述伺服电机通过丝杆驱动悬座上下运动;所述托架固定设置在两悬座底部;所述托架左侧下方设置有角度调整板;所述托架上方轴承连接有锁紧螺杆;所述锁紧螺杆上设置有多个丝套。
5.进一步优化本技术方案,所述的托架两侧上方固定设置有多个导向座;所述导向座中部滑动连接有导向键块;所述托架两侧下方设置有挡板;所述导向键块一端和挡板固定,另一端转轴连接有连接杆;所述连接杆另一端和丝套转轴连接。
6.进一步优化本技术方案,所述的支撑座上方两侧设置有滑座;所述滑座上贯穿滑动连接导向杆;所述导向杆顶部设置有锁块;所述锁块和滑座之间设置有弹簧。
7.进一步优化本技术方案,所述的导向杆底部转轴连接有翻转爪;所述翻转爪一侧设置有支撑台,另一侧设置有折弧板;所述托板设置在支撑台上方。
8.进一步优化本技术方案,所述的折弧板一端设置有滚轮;当支撑台上表面水平时,所述滚轮和支撑座两侧内壁接触。
9.进一步优化本技术方案,所述的支撑座两侧内壁下方设置有取料凹槽;所述取料
凹槽和滚轮在宽度方向上相对应。
10.与现有技术相比,本实用新型具有以下优点:
11.1、所述托架左侧下方设置有角度调整板,角度调整板的设置可将硅钢片的左侧矫正对齐。
12.2、所述托架两侧下方设置有挡板,所述导向键块一端和挡板固定,另一端转轴连接有连接杆,所述连接杆另一端和丝套转轴连接,当硅钢片切割后输送到收集区时,当锁紧螺杆转动时会推动两侧挡板向中部合并,可通过两侧的挡板将堆垛好的硅钢片向中部集中矫正。
13.3、堆垛完成后伺服电机驱动托板下降,当托盘运动到输送线上时,滚轮正好运动到取料凹槽内部,在重力的作用下滚轮向上运动,支撑台向下运动,翻转爪自动打开,在托板上的硅钢片经输送线运送到下一工序。
14.4、硅钢片堆垛完成后无论是在宽度方向上还是在长度方向上都非常整齐,方便后续铁芯叠片工作。
附图说明
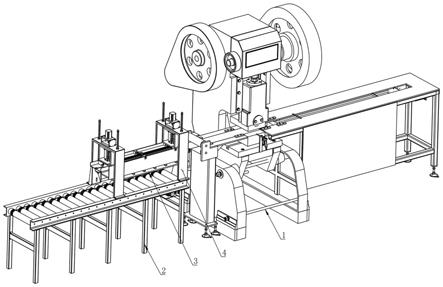
15.图1为一种铁芯硅钢片生产用自动收集装置的立体结构图。
16.图2为一种铁芯硅钢片生产用自动收集装置的钢片自动收集装置示意图。
17.图3为一种铁芯硅钢片生产用自动收集装置的钢片自动收集装置局部结构侧视图。
18.图4为一种铁芯硅钢片生产用自动收集装置的滚轮部位安装结构局部放大图。
19.图5为一种铁芯硅钢片生产用自动收集装置的丝套安装部位结构局部放大图。
20.图中:1、横剪机;2、输送线;3、托板;4、钢片自动收集装置;401、支撑座;402、托架;403、伺服电机;404、锁紧螺杆;405、丝杆;406、悬座;407、导向组件;408、丝套;409、导向座;410、导向键块;411、挡板;412、连接杆;413、滑座;414、导向杆;415、锁块;416、翻转爪;417、支撑台;418、折弧板;419、滚轮;420、取料凹槽;421、弹簧;422、角度调整板。
具体实施方式
21.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
22.具体实施方式一:结合图1
‑
5所示,一种铁芯硅钢片生产用自动收集装置,包括横剪机1、输送线2和托板3,其特征在于:所述输送线2上固定设置有钢片自动收集装置4;所述托板3设置在钢片自动收集装置4内部下方;所述钢片自动收集装置4包括支撑座401、托架402、伺服电机403和锁紧螺杆404;所述支撑座401固定设置在输送线2上方;所述伺服电机403固定设置在支撑座401顶部;伺服电机403下方设置有丝杆405和悬座406;所述悬座406和支撑座401之间设置有导向组件407;所述伺服电机403通过丝杆405驱动悬座406上下运动;所述托架402固定设置在两悬座406底部;所述托架402左侧下方设置有角度调整板422;所述托架402上方轴承连接有锁紧螺杆404;所述锁紧螺杆404上设置有多个丝套408。
23.优选的,所述托架402两侧上方固定设置有多个导向座409;所述导向座409中部滑动连接有导向键块410;所述托架402两侧下方设置有挡板411;所述导向键块410一端和挡板411固定,另一端转轴连接有连接杆412;所述连接杆412另一端和丝套408转轴连接。
24.优选的,所述支撑座401上方两侧设置有滑座413;所述滑座413上贯穿滑动连接导向杆414;所述导向杆414顶部设置有锁块415;所述锁块415和滑座413之间设置有弹簧421。
25.优选的,所述导向杆414底部转轴连接有翻转爪416;所述翻转爪416一侧设置有支撑台417,另一侧设置有折弧板418;所述托板3设置在支撑台417上方。
26.优选的,所述折弧板418一端设置有滚轮419;当支撑台417上表面水平时,所述滚轮419和支撑座401两侧内壁接触。
27.优选的,所述支撑座401两侧内壁下方设置有取料凹槽420;所述取料凹槽420和滚轮419在宽度方向上相对应。
28.使用时,步骤一,结合图1
‑
5所示,钢带在输送线2的作用下向左侧输送,当钢带经过横剪机1时对钢带进行冲压,从而制成成品的硅钢带,硅钢带经输送线2进行输送直到硅钢带收集装置位置,硅钢片会掉落到托板3上方,因所述托架402左侧下方设置有角度调整板422,当硅钢片左端运动到角度调整板422位置时,角度调整板422可将硅钢片的左侧矫正对齐;硅钢片运动到左侧的角度调整板422位置时,伺服电机403启动,从而带动悬座406、托架402和挡板411一起向下运动,托板3向下运动时压动托板3一起向下运动。
29.因所述支撑座401上方两侧设置有滑座413,所述滑座413上贯穿滑动连接导向杆414,所述导向杆414顶部设置有锁块415,所述锁块415和滑座413之间设置有弹簧421,所述导向杆414底部转轴连接有翻转爪416;所述翻转爪416一侧设置有支撑台417,另一侧设置有折弧板418,所述托板3设置在支撑台417上方,所以当托架402向下运动时会带动翻转爪416一起向下运动,翻转爪416向下运动带动导向杆414沿导向座409向下运动,导向杆414向下运动时压缩弹簧421。
30.因所述折弧板418一端设置有滚轮419,所以当翻转爪416向下运动时,翻转爪416外侧的滚轮419沿支撑座401内壁向下滚动;同理当第二片硅钢片左端运动到角度调整板422位置时,伺服电机403再次转动,从而推动托板3继续向下运动,托板3向下运动一次的距离等于硅钢片的厚度,所以硅钢片每次运动到托板3时的高度相同,硅钢片在长度方向上放置比较整齐。
31.步骤二,结合图1
‑
5所示,硅钢片在托板3上堆叠时,滚轮419一直沿支撑座401内壁向下滑动,当硅钢片堆叠完毕后,锁紧螺杆404转动,因所述托架402两侧下方设置有挡板411,所述导向键块410一端和挡板411固定,另一端转轴连接有连接杆412,所述连接杆412另一端和丝套408转轴连接,锁紧螺杆404转动时会带动丝套408向右侧滑动,丝套408向右侧运动时会通过连接杆412拉动滑动键块沿导向座409向中部合并,导向键块410向中部运动时,会带动挡板411一起向中部运动,挡板411向中部运动时会推动堆垛的硅钢片向中部集中矫正,硅钢片在宽度方向上堆垛比较整齐。
32.硅钢片矫正完毕后,锁紧螺杆404反向转动,从而带动两侧挡板411打开;伺服电机403继续转动,带动托板3一直向下运动。
33.因当支撑台417上表面水平时,所述滚轮419和支撑座401两侧内壁接触,所述支撑座401两侧内壁下方设置有取料凹槽420,所述取料凹槽420和滚轮419在宽度方向上相对
应,所以当滚轮419运动到取料凹槽420位置时,在支撑台417的压动下,翻转爪416内侧向下翻转,滚轮419一侧上下翻转,支撑台417向下翻转时,托板3落在输送线2上,输送线2带动托板3和堆垛好的硅钢片一起向左侧运出堆垛区域。
34.支撑台417上方空出位置的输送线2上放置空的托板3,伺服电机403反向转动,从而带动托架402和挡板411一起抬起,在弹簧421的作用下拉动导向杆414和翻转爪416一起向上运动,翻转爪416向上运动时滚轮419从取料凹槽420内部移出,支撑台417转动到水平位置,空的托板3卡在支撑台417上方,从而在支撑台417的作用下带动空的托板3一起上上升,直至托板3上升的初始位置,伺服电机403停止工作,从而可进行下次一堆垛工作。
35.硅钢片堆垛完成后无论是在宽度方向上还是在长度方向上都非常整齐,方便后续铁芯叠片工作。
36.本实用新型的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本实用新型主要用来保护机械装置,所以本实用新型不再详细解释控制方式和电路连接。
37.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1