搬送偏移量检测方法与流程
1.本发明涉及搬送偏移量检测方法,求出从第1工作台向第2工作台搬送工件的搬送单元的搬送偏移量。
背景技术:
2.由分割预定线划分而在正面上形成有ic、lsi等多个器件的晶片通过切割装置分割成各个器件芯片,分割得到的各器件芯片被用于移动电话、个人计算机等电子设备。
3.切割装置大致包含:卡盘工作台,其对晶片进行保持;切削单元,其对卡盘工作台所保持的晶片进行切削;x轴进给单元,其将卡盘工作台和切削单元在x轴方向上相对地进行加工进给;y轴进给单元,其将卡盘工作台和切削单元在y轴方向上相对地进行分度进给;拍摄单元,其拍摄卡盘工作台所保持的晶片而检测要进行切削的区域;清洗单元,其对切削完成的晶片进行清洗;以及搬送单元,其将晶片从卡盘工作台搬送至清洗单元,该切割装置能够将晶片高精度地进行切削(例如参照专利文献1)。切割装置的清洗单元包含:能够旋转的旋转工作台,其对晶片进行保持;以及清洗液喷射喷嘴,其向旋转工作台所保持的晶片喷射清洗液。
4.专利文献1:日本特开2010-36275号公报
5.但是,在无法通过搬送单元将保持于切割装置的卡盘工作台的适当位置的晶片搬送至清洗单元的旋转工作台的适当位置的情况下,有可能由于旋转工作台的高速旋转而使晶片从旋转工作台飞散。因此,需要实测从卡盘工作台到旋转工作台的方向和距离而对搬送单元的搬送方向和搬送距离进行微调,但存在如下的问题:这样的微调花费工夫,生产率较差。
6.该问题在具有在两个以上的工作台之间搬送晶片的机构的各种处理装置(例如激光加工装置、磨削装置、检查装置)中均会发生。
技术实现要素:
7.鉴于上述事实而完成的本发明的课题在于提供搬送偏移量检测方法,能够容易地求出搬送单元的搬送偏移量。
8.根据本发明,提供解决上述课题的下述搬送偏移量检测方法。即,提供搬送偏移量检测方法,在对工件实施处理的处理装置中求出搬送单元的搬送偏移量,该处理装置至少具有能够旋转的第1工作台、能够旋转的第2工作台、将工件从该第1工作台搬送至该第2工作台的该搬送单元以及对该第1工作台所保持的工件进行拍摄的拍摄单元,其中,该搬送偏移量检测方法包含如下的工序:第1坐标存储工序,将形成有标记的工件保持于该第1工作台并利用该拍摄单元进行拍摄,将标记的坐标作为x1、y1坐标进行存储;180度旋转工序,通过该搬送单元将该第1工作台所保持的工件搬送至该第2工作台并进行保持,并使该第2工作台旋转180度;返回工序,通过该搬送单元将该第2工作台所保持的工件搬送至该第1工作台并进行保持;第2坐标存储工序,使该第1工作台旋转180度,利用该拍摄单元对工件进行
拍摄,将标记的坐标作为x2、y2坐标进行存储;以及搬送偏移量计算工序,将(x2-x1)/2作为x轴方向的搬送偏移量并将(y2-y1)/2作为y轴方向的搬送偏移量而进行计算。
9.优选在该搬送单元的移动量上加上(x2-x1)/2和(y2-y1)/2而校正搬送偏移。
10.本发明的搬送偏移量检测方法在对工件实施处理的处理装置中求出搬送单元的搬送偏移量,该处理装置至少具有能够旋转的第1工作台、能够旋转的第2工作台、将工件从该第1工作台搬送至该第2工作台的该搬送单元以及对该第1工作台所保持的工件进行拍摄的拍摄单元,其中,该搬送偏移量检测方法包含如下的工序:第1坐标存储工序,将形成有标记的工件保持于该第1工作台并利用该拍摄单元进行拍摄,将标记的坐标作为x1、y1坐标进行存储;180度旋转工序,通过该搬送单元将该第1工作台所保持的工件搬送至该第2工作台并进行保持,并使该第2工作台旋转180度;返回工序,通过该搬送单元将该第2工作台所保持的工件搬送至该第1工作台并进行保持;第2坐标存储工序,使该第1工作台旋转180度,利用该拍摄单元对工件进行拍摄,将标记的坐标作为x2、y2坐标进行存储;以及搬送偏移量计算工序,将(x2-x1)/2作为x轴方向的搬送偏移量并将(y2-y1)/2作为y轴方向的搬送偏移量而进行计算,因此无需实测从第1工作台到第2工作台的方向和距离,能够根据标记的坐标的偏移而容易地求出搬送单元的搬送偏移量。
附图说明
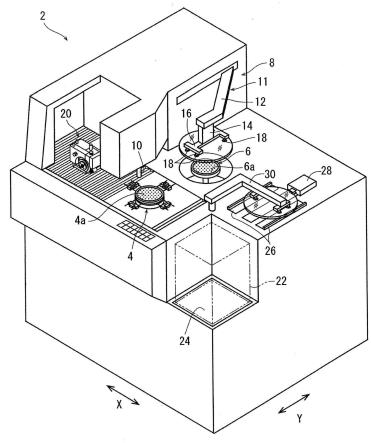
11.图1是能够实施本发明的搬送偏移量检测方法的处理装置的立体图。
12.图2是形成有标记的工件的俯视图。
13.图3是图1所示的第1、第2工作台的示意性俯视图。
14.图4是第1坐标存储工序中的第1、第2工作台的示意性俯视图。
15.图5是示出通过搬送单元将第1工作台所保持的工件搬送至第2工作台并进行保持的状态的示意性俯视图。
16.图6是示出从图5所示的状态使第2工作台旋转180度的状态的示意性俯视图。
17.图7是示出通过搬送单元将第2工作台所保持的工件搬送至第1工作台并进行保持的状态的示意性俯视图。
18.图8是示出从图7所示的状态使第1工作台旋转180度的状态的示意性俯视图。
19.标号说明
20.2:处理装置;4:第1工作台;6:第2工作台;8:搬送单元;10:拍摄单元;w:工件。
具体实施方式
21.以下,参照附图对本发明的搬送偏移量检测方法的优选实施方式进行说明。
22.首先,对能够实施本发明的搬送偏移量检测方法的处理装置进行说明。图1所示的处理装置2至少具有:能够旋转的第1工作台4;能够旋转的第2工作台6;将工件从第1工作台4搬送至第2工作台6的搬送单元8;以及对第1工作台4所保持的工件进行拍摄的拍摄单元10。
23.圆形的第1工作台4通过x轴搬送单元(未图示)在图1中箭头x所示的x轴方向上进行搬送,并且通过第1工作台用电动机(未图示)以第1工作台4的中心c1(参照图3)为轴心而旋转。x轴搬送单元例如可以构成为具有:滚珠丝杠,其与第1工作台4连结,沿x轴方向延伸;
以及电动机,其使该滚珠丝杠旋转。另外,图1中箭头y所示的y轴方向是与x轴方向垂直的方向,x轴方向和y轴方向所规定的xy平面实质上是水平的。
24.如图1所示,在第1工作台4的上端部分配置有与吸引单元(未图示)连接的多孔质的圆形状吸附卡盘4a。并且,第1工作台4利用吸引单元在吸附卡盘4a上生成吸引力,由此对圆板状的半导体晶片等工件w(参照图2)进行吸引保持。另外,图示的实施方式的处理装置2是对工件w实施切削加工的切割装置,第1工作台4在对工件w实施切削加工时对工件w进行吸引保持。
25.图示的实施方式的第2工作台6是在对实施了切削加工而附着有切削屑的工件w进行清洗时对工件w进行吸引保持的旋转工作台。圆形的第2工作台6通过第2工作台用电动机(未图示)以第2工作台6的中心c2(参照图3)为轴心而旋转。
26.如图1所示,与第1工作台4同样地,在第2工作台6的上端部分配置有与吸引单元(未图示)连接的多孔质的圆形状吸附卡盘6a。并且,在第2工作台6中,也利用吸引单元在吸附卡盘6a上生成吸引力,由此对工件w进行吸引保持。另外,一边使吸引保持着工件w的第2工作台6旋转一边从清洗液喷射喷嘴(未图示)对工件w喷射清洗液,由此能够对工件w进行清洗。
27.图示的实施方式的搬送单元8包含:上述x轴搬送单元,其在x轴方向上搬送第1工作台4所保持的工件w;以及y轴搬送单元11,其对第1工作台4所保持的工件w进行保持而升降,并且在y轴方向上进行搬送。
28.y轴搬送单元11包含:在y轴方向上移动自如的臂12;使臂12在y轴方向上移动的臂移动单元(未图示);安装于臂12的前端下表面的托架片14;固定于托架片14的下表面的h形状的板16;以及配置于板16的下表面的多个吸引垫18。臂移动单元例如可以构成为具有:滚珠丝杠,其与臂12连结,沿y轴方向延伸;以及电动机,其使该滚珠丝杠旋转。托架片14构成为通过气缸等适当的致动器在上下方向上伸缩自如。另外,各吸引垫18与吸引单元(未图示)连接。
29.在搬送单元8中,在利用x轴搬送单元将第1工作台4定位于规定的搬送开始位置之后,利用y轴搬送单元11的吸引垫18对第1工作台4上的工件w进行吸引保持,从第1工作台4接收工件w。并且,接收了工件w的y轴搬送单元11使臂12和托架片14移动而将工件w从第1工作台4搬送至第2工作台6。
30.拍摄单元10对通过x轴搬送单元定位于规定的拍摄位置的第1工作台4上的工件w进行拍摄。通过该拍摄单元10拍摄而得的图像数据发送至处理装置2的控制单元(未图示)。
31.由计算机构成的控制单元包含:中央处理装置(cpu),其按照控制程序进行运算处理;只读存储器(rom),其保存控制程序等;以及能够读写的随机存取存储器(ram),其保存运算结果等。并且,在控制单元中,对从拍摄单元10发送的图像数据执行图像解析,例如获取形成于工件w的标记m(参照图2)的x坐标和y坐标并进行存储。另外,控制单元控制处理装置2的动作,作为一例,根据预先输入至控制单元的条件而控制搬送单元8的移动量。
32.如图1所示,处理装置2还具有:切削单元20,其对第1工作台4所保持的工件w进行切削;升降自如的盒台24,其载置收纳有多个工件w的盒22;搬出搬入单元28,其从盒22中拉出加工前的工件w并搬出至暂放台26,并且将定位于暂放台26的加工完成的工件w搬入至盒22中;以及移动单元30,其使从盒22搬出至暂放台26的加工前的工件w移动至第1工作台4。
33.接着,对在上述处理装置2中求出搬送单元8的搬送偏移量的搬送偏移量检测方法进行说明。在图示的实施方式中,首先实施第1坐标存储工序,将形成有标记m的工件w保持于第1工作台4并利用拍摄单元10进行拍摄,将标记m的坐标作为x1、y1坐标进行存储。
34.在第1坐标存储工序中,首先按照形成有标记m的面朝上的状态将工件w载置于第1工作台4。接着,通过x轴搬送单元使第1工作台4移动,将第1工作台4定位于规定的拍摄位置,利用拍摄单元10对第1工作台4所保持的工件w进行拍摄。并且,通过控制单元对拍摄单元10所拍摄的图像执行图像解析,获取标记m的坐标作为x1、y1坐标并进行存储(参照图4)。
35.在实施了第1坐标存储工序之后,实施180度旋转工序:通过搬送单元8将第1工作台4所保持的工件w搬送至第2工作台6并进行保持,并使第2工作台6旋转180度。
36.在180度旋转工序中,首先通过x轴搬送单元使第1工作台4移动,将第1工作台4定位于规定的搬送开始位置。若将第1工作台4定位于搬送开始位置,则使y轴搬送单元11的臂12和托架片14进行动作,使吸引垫18紧贴于第1工作台4上的工件w的上表面。接着,利用各吸引垫18对工件w进行吸引保持,并且解除第1工作台4的吸引力。
37.接着,使y轴搬送单元11的臂12和托架片14进行动作,由此将工件w从第1工作台4搬送至第2工作台6,使工件w的下表面与第2工作台6的上表面接触。接着,通过第2工作台6对工件w进行吸引保持,并且解除吸引垫18的吸引力。这样,将工件w从y轴搬送单元11交接至第2工作台6(参照图5)。并且,若将工件w交接至第2工作台6,则使第2工作台用电动机进行动作,如图6所示,使吸引保持着工件w的第2工作台6旋转180度。
38.在实施了180度旋转工序之后,实施返回工序:通过搬送单元8将第2工作台6所保持的工件w搬送至第1工作台4并进行保持。
39.在返回工序中,首先使y轴搬送单元11的吸引垫18紧贴于第2工作台6上的工件w的上表面,利用各吸引垫18对工件w进行吸引保持,并且解除第2工作台6的吸引力。接着,使臂12和托架片14进行动作,由此将工件w从第2工作台6搬送至第1工作台4,使工件w的下表面与第1工作台4的上表面接触。并且,如图7所示,通过第1工作台4对工件w进行吸引保持,并且解除吸引垫18的吸引力。这样,使工件w从第2工作台6返回至第1工作台4。
40.在实施了返回工序之后,实施第2坐标存储工序:使第1工作台4旋转180度,利用拍摄单元10对工件w进行拍摄,将标记m的坐标作为x2、y2坐标进行存储。
41.在第2坐标存储工序中,首先如图8所示,使第1工作台用电动机进行动作,使吸引保持着工件w的第1工作台4旋转180度。接着,通过x轴搬送单元使第1工作台4移动,将第1工作台4定位于规定的拍摄位置,利用拍摄单元10对第1工作台4所保持的工件w进行拍摄。并且,通过控制单元对利用拍摄单元10拍摄的图像执行图像解析,获取标记m的坐标作为x2、y2坐标并进行存储(参照图8)。
42.在实施了第2坐标存储工序之后,实施搬送偏移量计算工序:将(x2-x1)/2作为x轴方向的搬送偏移量并将(y2-y1)/2作为y轴方向的搬送偏移量而进行计算。在图示的实施方式中,通过控制单元进行搬送偏移量的计算。
43.在图示的实施方式中,如上所述,使从第1工作台4搬送至第2工作台6的工件w在第2工作台6中旋转180度,并且使从第2工作台6搬送(返回)至第1工作台4的工件w在第1工作台4中旋转180度,因此在存在搬送单元8的搬送偏移的情况下,搬送前的标记m的坐标(x1,y1)与搬送后的标记m的坐标(x2,y2)之间的距离成为搬送单元8的搬送偏移量的2倍。因此,
通过执行(x2-x1)/2和(y2-y1)/2的运算,能够求出x轴方向和y轴方向各自的搬送偏移量。另外,在不存在搬送单元8的搬送偏移的情况下,搬送前的标记m的坐标(x1,y1)与搬送后的标记m的坐标(x2,y2)一致。
44.在实施了搬送偏移量计算工序之后,优选在搬送单元8的移动量上加上(x2-x1)/2和(y2-y1)/2而校正搬送偏移。在图示的实施方式中,在将工件w从第1工作台4搬送至第2工作台6时,x轴搬送单元在x轴方向上搬送工件w,y轴搬送单元11在y轴方向和上下方向上搬送工件w,因此在x轴搬送单元的移动量上加上x轴方向的搬送偏移量,在y轴搬送单元11的移动量上加上y轴方向的搬送偏移量。由此,能够防止在将工件w从第1工作台4搬送至第2工作台6时产生搬送偏移,能够将工件w载置于第2工作台6的适当位置。
45.如上所述,在图示的实施方式中,包含如下的工序:第1坐标存储工序,将形成有标记m的工件w保持于第1工作台4,并利用拍摄单元10进行拍摄,将标记m的坐标作为x1、y1坐标进行存储;180度旋转工序,通过搬送单元8将第1工作台4所保持的工件w搬送至第2工作台6并进行保持,并使第2工作台6旋转180度;返回工序,通过搬送单元8将第2工作台6所保持的工件w搬送至第1工作台4并进行保持;第2坐标存储工序,使第1工作台4旋转180度,并利用拍摄单元10对工件w进行拍摄,将标记m的坐标作为x2、y2坐标进行存储;以及搬送偏移量计算工序,将(x2-x1)/2作为x轴方向的搬送偏移量并将(y2-y1)/2作为y轴方向的搬送偏移量而进行计算,因此能够容易地求出搬送单元8的搬送偏移量。
46.另外,关于x轴方向和y轴方向的搬送偏移量,也可以与图示的实施方式相反地采用(x1-x2)/2、(y1-y2)/2。这是因为,x1与x2的差的一半以及y1与y2的差的一半是搬送偏移量,所计算出的数值的符号是正(+)或负(-)表示产生搬送偏移的方向。
47.另外,在图示的实施方式中,作为对工件w实施切削加工的切割装置,说明了构成处理装置2的例子,但本发明只要是具有在两个以上的工作台之间搬送半导体晶片等工件的搬送单元的装置即可,能够在包含对工件实施激光加工的激光加工装置、对工件实施磨削加工的磨削装置以及对工件进行检查的检查装置在内的各种处理装置中实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1