一种轨道机器人的充电装置的制作方法
1.本实用新型涉及轨道巡检设备领域,具体涉及一种轨道机器人的充电装置。
背景技术:
2.目前对于隧道输电电缆常见的巡检方式主要包括人工巡检、轨道机器人巡检,人工巡检需要巡检人员下隧道检查,由于隧道环境高温潮湿、空气流动性差,对巡检人员的身体健康存在很大的影响,随着科技的发展,人工巡检已经逐渐被轨道机器人巡检取代,轨道机器人巡检可以长期停留在巡检区域,不需要人员到现场操作,因此具有一定的优势。
3.但是轨道机器人存在一个续航问题,为保证轨道机器人可以长期工作,就需要在机器人本体上装置相应的充电盒,与轨道上的充电极块对接为机器人充电,但是现有的充电盒中,其充电盒的充电极块不具备角度调整能力,在给轨道机器人充电时,由于不能调整充电极块的角度,可能会造成充电盒的充电极块与轨道上的充电极片接触不良导致不能充电。
技术实现要素:
4.本实用新型提供一种轨道机器人的充电装置,旨在解决现有技术中由于轨道机器人的充电装置不能调整充电极块的角度,可能会造成充电盒的充电极块与轨道上的充电极片接触不良导致不能充电的问题。
5.为了解决上述技术问题,本实用新型提供了一种轨道机器人的充电装置,包括:安装支架、定位模块和充电盒;
6.其中,所述定位模块与所述充电盒均设置在所述安装支架上,所述定位模块用于读取充电站点的位置;
7.所述充电盒包括充电基座、充电极块和角度调整装置,所述充电基座内设置有安装槽,所述充电极块和角度调整装置设置在所述安装槽内,所述充电极块与所述角度调整装置连接,所述充电极块可在所述安装槽内相对所述角度调整装置转动。
8.优选的,所述角度调整装置包括固定转轴,所述充电基座上设置有与所述固定转轴匹配的第一通孔,所述充电极块上设置有与所述固定转轴匹配的第二通孔,将所述固定转轴和充电极块安装在所述充电基座上时,所述固定转轴依次穿过所述第一通孔和第二通孔将所述充电极块安装在所述充电基座上,所述充电极块可相对所述固定转轴转动。
9.优选的,所述角度调整装置还包括两个压簧,所述充电极块的两侧设置有凸台,所述两个压簧分别安装在所述凸台下方,所述压簧的第一端套设在所述凸台上,所述压簧的第二端抵持所述充电基座的底部。
10.优选的,所述充电极块的两侧设置有斜角,便于所述充电极块在所述安装槽内转动。
11.优选的,所述定位模块包括磁性开关和读取器,所述磁性开关设置在所述安装支架中设置的磁性开关安装座上,所述读取器设在所述安装支架上,所述磁性开关用于感应
设置在轨道上的磁性件,在移动时轨道机器人移动时,当所述磁性开关感应到所述磁性件时,会触发所述磁性开关并使所述轨道机器人停止移动,所述读取器用于读取在轨道上的标签。
12.优选的,所述读取器为rfid读取器。
13.优选的,所述磁性开关包括磁传感器和控制开关,所述磁传感器与所述控制开关电连接,所述控制开关还与轨道机器人的驱动装置连接,所述磁传感器控制所述控制开关的开启或关闭,进而控制所述驱动装置。
14.优选的,所述磁传感器包括霍尔传感器。
15.优选的,所述充电盒有两个,分别设置在所述安装支架的两端,所述两个充电盒分别与轨道机器人电源装置的正极或负极连接。
16.优选的,所述充电基座为绝缘材料。
17.一种轨道机器人,其上设置有如上所述的轨道机器人的充电装置。
18.本实用新型提供的一种轨道机器人的充电装置,在充电盒中设置一个角度调整装置,在充电极块与轨道上的充电极片接触并进行充电时,可通过角度调整装置调整充电极块的角度,使充电极块与充电极片接触时保持良好的接触性,有效地解决了现有技术中轨道机器人的充电装置不能调整充电极块的角度,可能会造成充电盒的充电极块与轨道上的充电极片接触不良导致不能充电的问题。
附图说明
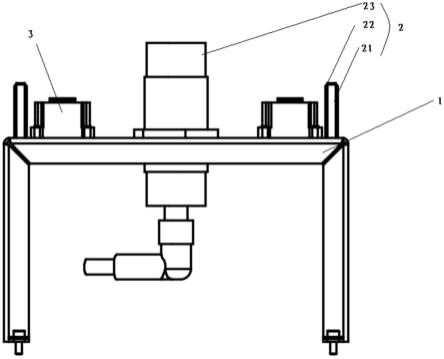
19.图1是本实用新型的轨道机器人的充电装置的结构示意图;
20.图2是本实用新型的轨道机器人的充电装置的装配示意图;
21.图3是本实用新型中轨道机器人的充电装置的充电盒的剖面图。
22.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
23.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.参照图1和图2,为本技术一实施例中的轨道机器人4的充电装置,包括:安装支架1、定位模块2和充电盒3;
26.其中,所述定位模块2与所述充电盒3均设置在所述安装支架1上,所述定位模块2用于读取充电站点的位置;
27.所述充电盒3包括充电基座31、充电极块32和角度调整装置,所述充电基座31内设置有安装槽,所述充电极块32和角度调整装置设置在所述安装槽内,所述充电极块32与所述角度调整装置连接,所述充电极块32可在所述安装槽内相对所述角度调整装置转动。
28.如上所述,本技术提供的轨道机器人4的充电装置,包括:安装支架1、定位模块2和
充电盒3,所述定位模块2与所述充电盒3均设置在所述安装支架1上,所述定位模块2包括磁性开关22和读取器23,所述磁性开关22设置在所述安装支架1中设置的磁性开关安装座21上,用于在感应轨道上设置的磁铁,磁铁与轨道上的轨道机器人4充电站点的位置一致,读取器23用于读取位于轨道机器人4充电站点前的标签,当读取器23读取轨道上的相应标签后会提醒机器人4前方为充电点,进而提醒轨道机器人4行走速度减小,当磁性开关22感应到轨道上的磁铁后,立即关闭用于控制驱动装置的开关,使轨道机器人4停止行走,在将充电装置安装到轨道机器人4上时,通过安装支架1下方设置的4个螺丝将充电装置安装到轨道机器人4上,以轨道机器人4前进方向为前方(图2中的右侧);读取器23应该安装在安装支架1的右侧或者中间,磁性开关22应该安装在安装支架1的左侧,这样在轨道机器人4移动时,读取器23可以先读取位于轨道机器人4充电站点前的标签,进而提醒轨道机器人4前方是充电站点,应减小行走速度,当左侧的磁性开关22感应到轨道上的磁铁后,就会立即关闭用于控制驱动装置的开关,使轨道机器人4停止行走。
29.充电盒3包括充电基座31、充电极块32和角度调整装置,充电基座31内设有一个用于安装充电极块32和角度调整装置的长方形安装槽,安装槽的宽度应略大于充电极块32的宽度,充电极块32和角度调整装置都设置在安装槽内,角度调整装置的两端分别与充电基座31连接,安装槽的两侧对应设置有第一通孔,充电极块32的几何中间处设置有一个第二通孔,在将充电极块32和角度调整装置安装到充电基座31内时,角度调整装置依次穿过第一通孔和第二通孔,将充电极块32安装到充电基座31的安装槽内,充电极块32可相对角度调整装置转动,因为安装槽的宽度略大于充电极块32的宽度,因此,安装槽本身结构就对充电极块32具有一个限位作用,使充电极块32可在安装槽进行一定角度范围内的摆动,而不会使充电极块32在安装槽内完全翻转,因此,在充电时,在充电极块32与设置在充电站点上的充电极片接触时,充电极块32可以在一定角度范围内转动。
30.参照图2,在一个实施例中,所述角度调整装置包括固定转轴331,所述充电基座31上设置有与所述固定转轴331匹配的第一通孔,所述充电极块32上设置有与所述固定转轴331匹配的第二通孔,将所述固定转轴331和充电极块32安装在所述充电基座31上时,所述固定转轴331依次穿过所述第一通孔和第二通孔将所述充电极块32安装在所述充电基座31上,所述充电极块32可相对所述固定转轴331转动。
31.如上所述,角度调整装置包括固定转轴331,充电基座31上设置有与固定转轴331匹配的第一通孔,所述充电极块32上设置有与固定转轴331匹配的第二通孔,固定转轴331依次穿过第一通孔和第二通孔,将充电极块32安装到充电基座31的安装槽内,充电极块32可相对固定转轴331转动。
32.在一个实施例中,所述角度调整装置还包括两个压簧332,所述充电极块32的两侧设置有凸台321,所述两个压簧332分别安装在所述凸台321下方,所述压簧332的第一端套设在所述凸台321上,所述压簧332的第二端抵持所述充电基座31的底部。
33.如上所述,角度调整装置还包括两个压簧332,在充电极块32的两侧设置有凸台321,两个压簧332一左一右的设置在凸台321的下方,压簧332的第一端套设在所述凸台321上,所述压簧332的第二端抵持充电基座31的底部,由于在充电过程中,充电极块32的角度可能不是与充电站点上的充电极片的角度完全一致,所以两个压簧332会受到不同的挤压力,因为压簧332本身的形变特性,会根据充电极块32两端受到的挤压力的大小产生反向的
作用力,使充电极块32的两侧完全与充电站点上的充电极片贴合,保证良好接触,当充电完成以后,利用压簧332本身的形变特性将充电极块32恢复到被挤压时的状态。
34.在一个实施例中,所述充电极块32的两侧设置有斜角322,便于所述充电极块32在所述安装槽内转动。
35.如上所述,在充电极块32的两侧设置有斜角322,不仅可以方便充电极块32与轨道上的充电极片对接,同时还可以使充电极块32在安装槽内的摆动幅度更大,便于充电极块32适应更大角度差的充电站点上的充电极片。
36.在一个实施例中,所述定位模块2包括磁性开关22和读取器23,所述磁性开关22设置在所述安装支架1中设置的磁性开关安装座21上,所述读取器23设在所述安装支架1上,所述磁性开关22用于感应设置在轨道上的磁性件,在移动时,轨道机器人4移动时,当所述磁性开关22感应到所述磁性件时,会触发所述磁性开关22并使所述轨道机器人4停止移动,所述读取器23用于读取在轨道上的标签。
37.在一个实施例中,所述读取器23为rfid读取器。
38.如上所述,定位模块2包括磁性开关22和读取器23,磁性开关22设置在所述安装支架1中设置的磁性开关安装座21,磁性开关安装座21设置有两个,分别设置在安装支架1的左右两端,磁性开关22也设置两个,分别对应设置在磁性开关安装座21上,磁性开关22为霍尔元件,可以感应设置在轨道上的磁铁,当两个磁性开关22中的任一个感应到设置在轨道上的磁铁时,就会触发磁性开关22,磁性开关22会控制轨道机器人4的驱动装置立即停止运行,进而轨道机器人4停止移动。
39.在一个实施例中,所述磁性开关22包括磁传感器和控制开关,所述磁传感器与所述控制开关电连接,所述控制开关还与轨道机器人4的驱动装置连接,所述磁传感器控制所述控制开关的开启或关闭,进而控制所述驱动装置。
40.如上所述,所述磁性开关22包括磁传感器和控制开关,所述磁传感器与所述控制开关电连接,所述控制开关还与轨道机器人4的驱动装置连接,当所述磁传感器感应到设置在轨道上的磁铁时,会触发控制,控制会控制轨道机器人4的驱动装置立即停止运行,进而轨道机器人4停止移动。
41.在一个实施例中,所述磁传感器包括霍尔传感器。
42.如上所述,所述磁传感器包括霍尔传感器,霍尔传感器的具体型号包括但不限于ys44ew、ss1104、ew560。
43.在一个实施例中,所述充电盒3有两个,分别设置在所述安装支架1的两端,所述两个充电盒3分别与轨道机器人4电源装置的正极或负极连接。
44.如上所述,安装支架1的左右两端各设置一个充电盒3,左端的充电盒3的输出极与轨道机器人4电池的正极连接,右端的充电盒3的输出极与轨道机器人4电池的负极连接,给电池充电。
45.在一个实施例中,所述充电基座31为绝缘材料。
46.如上所述,所述充电基座31为绝缘材料,因此充电基座31和充电极块32之间不会导电,充电极块32与充电站点上的充电极片连接后,电流直接流向轨道机器人4的电池中,不会消耗电能。
47.如图2所示,本技术还提供一种轨道机器人4,其上设置有如上所述的轨道机器人4
的充电装置。
48.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变,所述的连接可以是直接连接,也可以是间接连接。
49.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
50.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1