一种转移机械臂的制作方法
本技术涉及晶圆,特别涉及一种转移机械臂。
背景技术:
1、晶圆是指硅半导体集成电路制作所用的硅晶片,由于其形状为圆形,故称为晶圆;圆的原始材料是硅,而地壳表面有用之不竭的二氧化硅,二氧化硅矿石经由电弧炉提炼,盐酸氯化,并经蒸馏后,制成了高纯度的多晶硅,在对晶圆进行转移时往往会用到专用的机械臂进行。
2、为实现晶圆在转移时不易产生误差、污染以及效率不足的问题,现有专利公开号为cn218195209u一种晶圆清洗用转移机械臂,此装置通过机械手臂调节到合适的位置后,通过电机带动第一齿轮转动,通过柔性齿条从而带动第二齿轮以及第三齿轮转动,从而使第三齿轮和第一齿轮带动夹持件反向旋转,从而使晶圆得以被夹持,再通过机械手臂进行转移,从而避免出现人为操作所造成的一些影响。
3、而此装置在对晶圆进行夹持转移时,通过电机的驱动,只能使夹持件对一片晶圆进行夹持转移,若是强行夹持两片晶圆或电机驱动过渡容易造成晶圆的破损,从而使该移动机械臂在对晶圆进行转移时只能一片一片的进行,这样容易导致转移所耗时间较长,容易应县后续的加工进度。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种转移机械臂。
2、本实用新型所采用的技术方案如下:
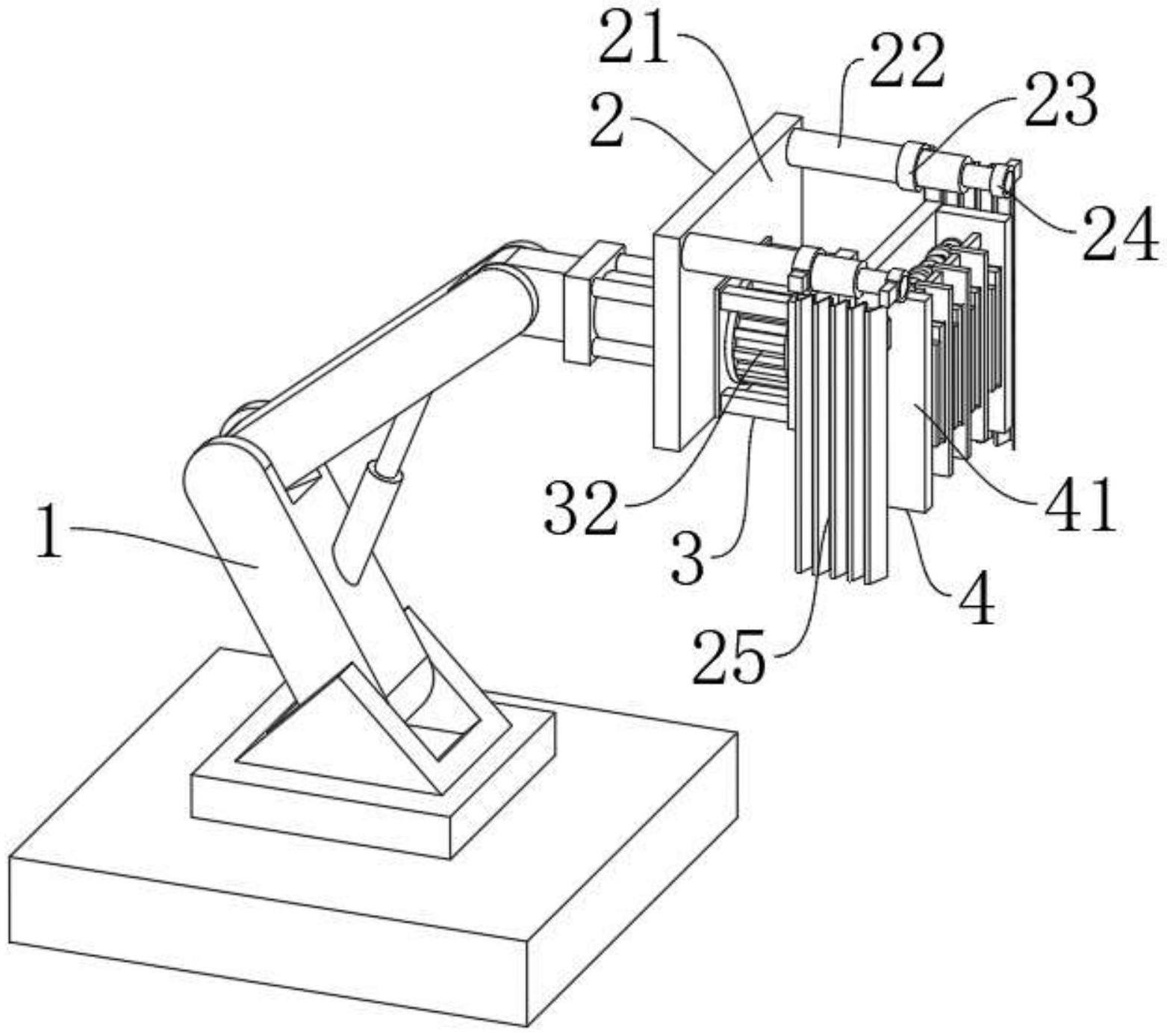
3、一种转移机械臂,包括机械转移臂、通过电力设备带动其他结构进行转动的旋转机构,还包括能够一次装夹多个晶圆且能够对晶圆有一定保护的装夹机构;所述旋转机构安装在所述机械转移臂一侧,所述装夹机构安装在所述旋转机构输出端;
4、所述装夹机构包括装夹架,所述装夹架固定在所述旋转机构的输出端,所述装夹架中间固定有两个固定轴,所述固定轴中间固定有多个主夹板,所述固定轴一侧设置有螺杆,且所述螺杆与所述装夹架转动连接,所述螺杆输入端联轴器连接有第二电机,所述螺杆下方设置有限位轴,所述限位轴与所述螺杆中间设置有多个副夹板,所述螺杆外围固定有多个限位圈。
5、优选地:所述限位圈尺寸比所述主夹板尺寸宽。
6、优选地:所述副夹板与所述主夹板螺纹连接,所述副夹板与所述限位轴滑动配合。
7、优选地:所述装夹机构还包括多个夹紧垫,所述夹紧垫固定在所述主夹板与所述副夹板对应的端面上,且所述装夹架后端内壁也固定有夹紧垫。
8、优选地:所述夹紧垫与所述装夹架、所述主夹板以及所述副夹板的固定端为金属材质,另一端为橡胶材质。
9、优选地:所述旋转机构包括安装架,所述安装架安装在所述机械转移臂一侧,所述安装架内部安装有第一电机,所述第一电机输出端联轴器连接有转轴。
10、有益效果在于:当装置需要对晶圆进行转移时,通过机械转移臂的运作以及旋转机构的转动,将设备调整到合适的位置,启动第二电机,通过螺杆与副夹板的螺纹连接以及限位轴与副夹板的滑动配合,螺杆转动后能够让多个副夹板向对应的主夹板移动,从而对多片晶圆进行夹持处理,通过这样使装置能够一次性夹持多片晶圆进行转移,在对晶圆进行夹持的过程中,通过限位圈的尺寸比主夹板稍宽一些,使限位圈能够对副夹板进行一定过的限位,再配合橡胶的特性,避免副夹板过渡的夹紧对晶圆造成破损。
技术特征:
1.一种转移机械臂,包括机械转移臂(1)、通过电力设备带动其他结构进行转动的旋转机构(3),其特征在于:还包括能够一次装夹多个晶圆且能够对晶圆有一定保护的装夹机构(4);所述旋转机构(3)安装在所述机械转移臂(1)一侧,所述装夹机构(4)安装在所述旋转机构(3)输出端;
2.根据权利要求1所述的一种转移机械臂,其特征在于:所述限位圈(49)尺寸比所述主夹板(43)尺寸宽。
3.根据权利要求1所述的一种转移机械臂,其特征在于:所述副夹板(47)与所述主夹板(43)螺纹连接,所述副夹板(47)与所述限位轴(46)滑动配合。
4.根据权利要求1所述的一种转移机械臂,其特征在于:所述装夹机构(4)还包括多个夹紧垫(48),所述夹紧垫(48)固定在所述主夹板(43)与所述副夹板(47)对应的端面上,且所述装夹架(41)后端内壁也固定有夹紧垫(48)。
5.根据权利要求4所述的一种转移机械臂,其特征在于:所述夹紧垫(48)与所述装夹架(41)、所述主夹板(43)以及所述副夹板(47)的固定端为金属材质,另一端为橡胶材质。
6.根据权利要求1所述的一种转移机械臂,其特征在于:所述旋转机构(3)包括安装架(31),所述安装架(31)安装在所述机械转移臂(1)一侧,所述安装架(31)内部安装有第一电机(32),所述第一电机(32)输出端联轴器连接有转轴(33)。
技术总结
本技术公开了一种转移机械臂,包括机械转移臂、通过电力设备带动其他结构进行转动的旋转机构,还包括能够一次装夹多个晶圆且能够对晶圆有一定保护的装夹机构;通过上述技术方案,当装置对晶圆转移时,通过机械转移臂的运作以及旋转机构的转动,将设备调整到合适的位置,启动第二电机,通过螺杆与副夹板的螺纹连接以及限位轴与副夹板的滑动配合,螺杆转动后能够让多个副夹板向对应的主夹板移动,从而对多片晶圆进行夹持处理,通过这样使装置能够一次性夹持多片晶圆进行转移,在对晶圆进行夹持的过程中,通过限位圈的尺寸比主夹板稍宽一些,使限位圈能够对副夹板进行一定过的限位,再配合橡胶的特性,避免副夹板过渡的夹紧对晶圆造成破损。
技术研发人员:陈松涛,何在田,田耕
受保护的技术使用者:郑州轨道交通信息技术研究院
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!