一种力控关节碳化硅单管驱动器电路
1.本发明涉及机器人技术领域,具体涉及一种用于机器人力控关节的碳化硅单管驱动器电路。
背景技术:
2.机器人关节主要分为普通关节和力控关节,普通关节只由伺服电机系统和减速器系统够成,这样的关节只能做到位置控制,从而只能让机器人进行无精确力反馈的运动。而力控关节则由伺服电机、减速器、力矩传感器组成,这样的关节既可以实现位置控制又可以实现力矩控制,这样的机器人就可以实现一些普通机器人无法完成的任务,比如需要精确控制出力的遥操作系统、医疗手术机器人系统,除此之外,工业上可以应用到一些精密零件装配、柔性制造系统中。
3.机器人力控关节主要由无框力矩电机、谐波减速器、编码器、制动器、力矩传感器、驱动器和控制器构成。其中驱动器主要用于驱动无框力矩电机旋转,从而使其转子旋转输出动力。所以驱动器的性能决定了关节的输出效率。现有的力控关节驱动器一般采用igbt或者mos管,这样的器件一般功率密度较小,比如在机器人关节瞬时启动和瞬时停止时,无法产生较大的瞬时功率。通过在驱动器上集成碳化硅场效应管,以达到提高瞬时功率的目的。
4.在电力电子行业的发展过程中,半导体技术起到了决定性作用。其中,功率半导体器件一直被认为是电力电子设备的关键组成部分。随着电力电子技术在工业、医疗、交通、消费等行业的广泛应用,功率半导体器件直接影响着这些电力电子设备的成本和效率。自从二十世纪五十年代真空管被固态器件代替以来,以硅材料为主的功率半导体器件就一直扮演着重要的角色。功率双极性晶体管及晶闸管的问世,大大减小的电力电子设备的体积重量,同时提高了变换效率。为了满足更高工作频率及更高功率等级的要求,国际整流器公司研发出首款功率场效应管,接下来的二十年,功率半导体器件进入一个蓬勃发展的时期,很多新型的功率器件,比如igbt、gto、ipm相继问世,并且在相关领域内得到越来越广泛的应用。功率硅器件的应用已经相当成熟,但随着日益增长的行业需求,硅器件由于其本身物理特性的限制,已经开始不适用于一些高压、高温、高效率及高功率密度的应用场合。
5.半导体技术一直是推动电力电子行业发展的决定性力量。功率硅器件的应用已经相当成熟,但随着日益增长的行业需求,硅器件由于其本身物理特性的限制,已经开始不适用于一些高压、高温、高效率及高功率密度的应用场合。
6.碳化硅材料因其优越的物理特性,开始受到人们的关注和研究。自从碳化硅1824年被瑞典科学家发现以来,直到二十世纪五十年代后半期,才真正被纳入到固体器件的研究中来。二十世纪九十年代以来,碳化硅技术得到了迅速发展。
7.20世纪90年代以来,碳化硅场效应管技术的迅速发展,引起人们对这种新一代功率器件的广泛关注。与硅材料相比,碳化硅材料较高的热导率决定了其高电流密度的特性,较高的禁带宽度又决定了碳化硅器件的高击穿场强和高工作温度。尤其在碳化硅场效应管
的开发与应用方面,与相同功率等级的硅场效应管相比,碳化硅场效应管导通电阻、开关损耗大幅降低,适用于更高的工作频率,另由于其高温工作特性,大大提高了高温稳定性。
技术实现要素:
8.针对现有技术中的上述不足,本发明提供了一种力控关节碳化硅单管驱动器电路,具有体积小巧、功率密度比大的优点,便于安装在协作机器人和医疗机器人的力控关节内部。
9.为了达到上述发明目的,本发明采用的技术方案为:
10.一种力控关节碳化硅单管驱动器电路,包括接口电路模块、电源电路模块、隔离电路模块、驱动电路模块和碳化硅功率模块;
11.所述接口电路模块的输入端分别与力控关节控制器和母线电源电性连接,其输出端与所述电源电路模块和所述隔离电路模块的输入端电性连接;所述接口电路模块用于输入母线电源和驱动信号,并输出电路反馈信号;
12.所述电源电路模块的输出端分别与所述隔离电路模块和所述驱动电路模块的输入端电性连接;所述电源电路模块用于向所述隔离电路模块和所述驱动电路模块提供供电电压;
13.所述隔离电路模块的输出端与所述驱动电路模块的输入端电性连接;所述隔离电路模块用于对母线电源进行隔离电平转换,并对驱动信号进行隔离;
14.所述驱动电路模块的输出端与所述碳化硅功率模块的输入端电性连接;所述驱动电路模块用于对所述碳化硅功率模块进行驱动,并对母线电源进行过流保护;
15.所述碳化硅功率模块的输出端与所述碳化硅功率模块的输入端电性连接;所述碳化硅功率模块用于采用碳化硅器件组成逆变电路将母线电压逆变输出三相交流电驱动电机运行。
16.本发明具有以下有益效果:
17.本发明采用碳化硅场效应管单管作为功率器件,使得碳化硅功率模块具备了更高的功率密度比、更高的开关频率、较高的温度耐受等优点,从而减小了驱动器尺寸和体积,提高了机器人控制的响应速率,使得驱动器更容易集成到较小的机器人关节中,适合应用于协作机器人和服务机器人关节。
附图说明
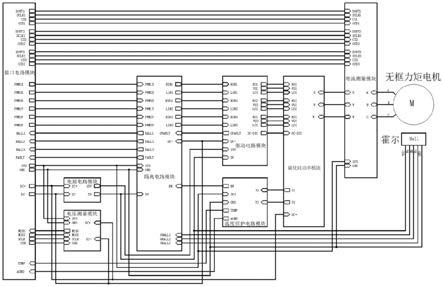
18.图1为本发明实施例中力控关节碳化硅单管驱动器电路结构示意图;
19.图2为本发明实施例中接口电路模块结构示意图;
20.图3为本发明实施例中电源电路模块结构示意图;
21.图4为本发明实施例中隔离电路模块结构示意图;
22.图5为本发明实施例中驱动电路模块结构示意图;
23.图6为本发明实施例中碳化硅功率模块结构示意图;
24.图7为本发明实施例中电压测量模块结构示意图;
25.图8为本发明实施例中温度保护电路模块结构示意图;
26.图9为本发明实施例中电流测量模块结构示意图。
具体实施方式
27.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
28.如图1所示,本发明实施例提供了一种力控关节碳化硅单管驱动器电路,包括接口电路模块、电源电路模块、电压测量模块、隔离电路模块、驱动电路模块、温度保护电路模块、碳化硅功率模块和电流测量模块;
29.接口电路模块的输入端分别与力控关节控制器和母线电源电性连接,其输出端与电源电路模块和隔离电路模块的输入端电性连接;接口电路模块用于输入母线电源和驱动信号,并输出电路反馈信号;
30.电源电路模块的输出端分别与隔离电路模块和驱动电路模块的输入端电性连接;电源电路模块用于向隔离电路模块和驱动电路模块提供供电电压;
31.隔离电路模块的输出端与驱动电路模块的输入端电性连接;隔离电路模块用于对母线电源进行隔离电平转换,并对驱动信号进行隔离;
32.驱动电路模块的输出端与碳化硅功率模块的输入端电性连接;驱动电路模块用于对碳化硅功率模块进行驱动,并对母线电源进行过流保护;
33.碳化硅功率模块的输出端与碳化硅功率模块的输入端电性连接;碳化硅功率模块用于采用碳化硅器件组成逆变电路将母线电压逆变输出三相交流电驱动电机运行。
34.在本发明的一个可选实施例中,如图2所示,接口电路模块包括排线信号接口和母线电源接口;用于为输入信号提供接口和对输入母线电源进行滤波。
35.排线信号接口用于输入驱动信号,并输出电路反馈信号;其包括连接各路信号的排线p1。
36.具体而言,排线信号接口为fpc排线信号接口,其由40p排线p1构成,连接各路信号;这里的各路信号包括电压检测信号、驱动信号、霍尔信号、电流检测信号等。
37.母线电源接口用于输入母线电源,其包括电源接口j1、与电源接口j1的引脚1和引脚2并联的电源电解滤波电容c1、电源滤波电容c2、电源滤波电容c3和电源滤波电容c4,电源电解滤波电容c1、电源滤波电容c2、电源滤波电容c3和电源滤波电容c4用于对母线输入电压进行滤波;电源接口j1的引脚1为电压输出端,引脚2接地。
38.在本发明的一个可选实施例中,如图3所示,电源电路模块包括60v至15v的母线电源单元和15v至5v的模拟电源单元;用于为驱动电路和隔离电路部分提供供电电压。
39.母线电源单元包括直流转直流电源模块u7,其型号为ltm8073ey;直流转直流电源模块u7的电源输入引脚c3、c4、c5及c6与母线电源接口的电压输出端dc+电性连接,并经过并联的滤波电容c32和滤波电容c33接地,用于输入母线电源并进行滤波;直流转直流电源模块u7的上拉引脚b6经过上拉电阻r31与母线电源接口的电压输出端dc+电性连接,用于对上拉引脚b6运行提供上拉电压;直流转直流电源模块u7的软启动引脚b5经过电容c34接地,用于提供软启动或跟踪功能,并通过电容c34产生电压斜坡;直流转直流电源模块u7的输出电压调整引脚b1经过输出电压调整电阻r32接地;直流转直流电源模块u7的开关频率配置引脚a5经过开关频率配置电阻r33接地,用于通过开关频率配置电阻r33配置开关频率;直
流转直流电源模块u7的电源输出引脚g1、g2、g3、g4、g5、g6、h1、h2、h3、h4、h5及h6为第一供电端,提供15v电压,并经过并联的滤波电容c30和滤波电容c31接地;
40.模拟电源单元包括稳压器模块u8,采用ldo稳压器芯片,其型号为lm1085
‑
5.0;稳压器模块u8的电源输入引脚3与直流转直流电源模块u7的第一供电端(即15v电压端)电性连接,并经过滤波电容c35接地;稳压器模块u8的电源输出引脚2经过斩波电感l2分别与第二供电端(即5v电压端)及并联的滤波电容c36和滤波电容c37接地。
41.模拟电源单元还包括发光二极管dp2,其可以采用绿色、红色或其它颜色发光二极管;发光二极管dp2的正极经过限流电阻r34与第二供电端(即5v电压端)电性连接;发光二极管dp2的负极接地;从而对模拟电源15v至5v部分提供输出指示。
42.在本发明的一个可选实施例中,如图4所示,隔离电路模块包括三正向一反向的四通道数字隔离器u9、三正向一反向的四通道数字隔离器u10和两正向两反向的四通道数字隔离器u11;具体而言,四通道数字隔离器u9和四通道数字隔离器u10均包括三个正向通道一个反向通道,速率可达150mbps,其型号为adum141d0;四通道数字隔离器u11包括两个正向通道两个反向通道,速率可达150mbps,其型号为adum142d0。隔离电路模块通过构成信号隔离电路,可以将3.3v电平和5v电平进行隔离电平转换,并且具有较低的时间延迟;并且采用高速数字隔离器作为隔离器,提高了隔离信号的传输速率,降低了延迟时间,提高了电机控制的响应速度。
43.四通道数字隔离器u9的电源输入引脚16与稳压器模块u8的第二供电端(即5v电压端)电性连接,并经过滤波电容c45接地;四通道数字隔离器u9的电源输出引脚1与第三供电端(即3.3v电压端)电性连接,并经过滤波电容c44接地;四通道数字隔离器u9的驱动信号输入引脚3、4、5与排线信号接口的驱动信号接口pwm1x、pwm2x、pwm3x电性连接;四通道数字隔离器u9的驱动信号输出引脚14、13、12与驱动电路模块的输入端hin1、hin2、hin3电性连接;四通道数字隔离器u9的霍尔信号输入引脚11与电机外带霍尔传感器输出端ghall1电性连接述四通道数字隔离器u9的霍尔信号输出引脚7与排线信号接口的霍尔信号接口hall1电性连接;
44.四通道数字隔离器u10的电源输入引脚16与稳压器模块u8的第二供电端(即5v电压端)电性连接,并经过滤波电容c47接地;四通道数字隔离器u10的电源输出引脚1与第三供电端(即3.3v电压端)电性连接,并经过滤波电容c46接地;四通道数字隔离器u10的驱动信号输入引脚3、4、5与排线信号接口的驱动信号接口pwm1y、pwm2y、pwm3y电性连接;四通道数字隔离器u10的驱动信号输出引脚14、13、12与驱动电路模块的输入端lin1、lin2、lin3电性连接;四通道数字隔离器u10的霍尔信号输入引脚11与电机外带霍尔传感器输出端ghall2电性连接;四通道数字隔离器u10的霍尔信号输出引脚7与排线信号接口的霍尔信号接口hall2电性连接;
45.四通道数字隔离器u11的电源输入引脚16与稳压器模块u8的第二供电端(即5v电压端)电性连接,并经过滤波电容c49接地;四通道数字隔离器u11的电源输出引脚1与第三供电端(即3.3v电压端)电性连接,并经过滤波电容c48接地;四通道数字隔离器u11的故障信号输入引脚11与驱动电路模块的故障信号输出端gfault电性连接;四通道数字隔离器u11的故障信号输出引脚6与排线信号接口的故障信号接口fault电性连接。
46.在本发明的一个可选实施例中,如图5所示,驱动电路模块包括采用薄膜硅技术的
驱动芯片u12,采用场效应管驱动芯片;驱动电路模块用于对后级场效应管进行驱动,并且能对于母线过流能产生保护;并且采用薄膜soi硅技术的六合一驱动芯片,提高了驱动电路的耐压同时减小了驱动电路的体积和尺寸。本发明对驱动芯片u12的具体形式并不作限定,只要能够将输入信号进行放大足够驱动mos管就可以。例如,驱动芯片u12可以是独立式驱动芯片。
47.驱动芯片u12的驱动信号输入引脚1、4、2、5、3、6经过电阻r45、r46、r47、r48、r49及r50组成的下拉电路接地,具体而言,驱动芯片u12的驱动信号输入引脚1、4、2、5、3、6分别与输入端hin1、lin1、hin2、lin2、hin3、lin3电性连接,并经过驱动信号下拉电阻r45、r46、r47、r48、r49及r50接地,其用于配置驱动芯片u12输入信号都为低电平,防止误开启;
48.驱动芯片u12的故障信号输出引脚8经过电阻r44和电容c56组成的上拉电路与第二供电端电性连接并接地,上拉电路起到缓冲作用,为驱动芯片u12的故障信号输出引脚8提供输出驱动;具体而言,驱动芯片u12的故障信号输出引脚8经过电阻r44与第二供电端电性连接,且经过电容c56接地,同时作为故障信号输出端gfault;
49.驱动芯片u12的电流测量引脚7分别经过限流电阻r51、r52及分流电阻r53组成的电流测量电路及滤波电容c57接地,电流测量电路得到的电压连接到驱动芯片u12的电流测量引脚7,当电路过流会导致分得电压大于0.5v,从而触发驱动芯片u12过流保护;具体而言,驱动芯片u12的电流测量引脚7经过并联的限流电阻r51、r52及滤波电容c57接地,限流电阻r51与限流电阻r52的接地端之间连接分流电阻r53。
50.驱动芯片u12的电源输入引脚10经过并联的滤波电容c50和滤波电容c52与第一供电端电性连接并接地,驱动芯片u12的电源输入引脚9与第一供电端电性连接并经过滤波电容c51接地。
51.驱动芯片u12的驱动信号输出引脚经过自举电容c53、c54和c55与碳化硅功率模块的驱动信号输入引脚电性连接,通过自举电容向各路半桥驱动输出高端场效应管的驱动电压;具体而言,驱动芯片u12的驱动信号输出引脚23作为驱动信号输出端h01,驱动芯片u12的驱动信号输出引脚22经过自举电容c53与引脚24电性连接,并作为驱动信号输出端vs1;驱动芯片u12的驱动信号输出引脚20作为驱动信号输出端h02,驱动芯片u12的驱动信号输出引脚19经过自举电容c54与引脚21电性连接,并作为驱动信号输出端vs2;驱动芯片u12的驱动信号输出引脚17作为驱动信号输出端h03,驱动芯片u12的驱动信号输出引脚16经过自举电容c55与引脚18电性连接,并作为驱动信号输出端vs3。
52.在本发明的一个可选实施例中,如图6所示,碳化硅功率模块包括由碳化硅基场效应管q2、q3、q4、q5、q6和q7构成的三相全桥逆变电路;其中碳化硅基场效应管q2、q3、q4为碳化硅功率模块三相全桥逆变电路上管,碳化硅基场效应管q5、q6、q7为碳化硅功率模块三相全桥逆变电路下管。碳化硅功率模块作为功率逆变电路使用,将直流母线电压逆变成三相交流电输出,可以驱动电机旋转。并且可以通过热敏电阻测量温度,将温度反馈给处理器,以及对过温状态的保护。碳化硅功率模块采用碳化硅场效应管单管作为功率器件,具有耐工作温度高、开关速率高等优点,便于焊接在铝基板散热器上组装成模块,减小了驱动器的空间尺寸,提高了驱动器输出的功率密度比。
53.碳化硅基场效应管q2的栅极1经过门极限流电阻r35与驱动芯片u12的驱动信号输出端h01电性连接;碳化硅基场效应管q2的漏极8与母线电源接口的电压输出端dc+电性连
接;碳化硅基场效应管q2的源极2与碳化硅基场效应管q5的漏极8电性连接,并经过电阻r38和二极管d2构成的瞬态抑制电路与驱动芯片u12的驱动信号输出端vs1电性连接,同时与电机的三相交流电输入接口u电性连接;具体而言,碳化硅基场效应管q2的源极2与碳化硅基场效应管q5的漏极8的连接端经过电阻r38分别与驱动芯片u12的驱动信号输出端vs1及二极管d2的负极电性连接,二极管d2的正极接地。
54.碳化硅基场效应管q5的栅极1经过门极限流电阻r41与驱动芯片u12的驱动信号输出端l01电性连接,碳化硅基场效应管q5的源极2接地。
55.碳化硅基场效应管q3的栅极1经过门极限流电阻r36与驱动芯片u12的驱动信号输出端h02电性连接;碳化硅基场效应管q3的漏极8与母线电源接口的电压输出端dc+电性连接;碳化硅基场效应管q3的源极2与碳化硅基场效应管q6的漏极8电性连接,并经过电阻r39和二极管d3构成的瞬态抑制电路与驱动芯片u12的驱动信号输出端vs2电性连接,同时与电机的三相交流电输入接口v电性连接;具体而言,碳化硅基场效应管q3的源极2与碳化硅基场效应管q3的漏极8的连接端经过电阻r39分别与驱动芯片u12的驱动信号输出端vs2及二极管d3的负极电性连接,二极管d3的正极接地。
56.碳化硅基场效应管q6的栅极1经过门极限流电阻r42与驱动芯片u12的驱动信号输出端l02电性连接,碳化硅基场效应管q6的源极2接地。
57.碳化硅基场效应管q4的栅极1经过门极限流电阻r37与驱动芯片u12的驱动信号输出端h03电性连接;碳化硅基场效应管q4的漏极8与母线电源接口的电压输出端dc+电性连接;碳化硅基场效应管q4的源极2与碳化硅基场效应管q7的漏极8电性连接,并经过电阻r40和二极管d4构成的瞬态抑制电路与驱动芯片u12的驱动信号输出端vs3电性连接,同时与电机的三相交流电输入接口w电性连接;具体而言,碳化硅基场效应管q4的源极2与碳化硅基场效应管q4的漏极8的连接端经过电阻r40分别与驱动芯片u12的驱动信号输出端vs3及二极管d4的负极电性连接,二极管d4的正极接地。
58.碳化硅基场效应管q7的栅极1经过门极限流电阻r43与驱动芯片u12的驱动信号输出端l03电性连接,碳化硅基场效应管q7的源极2接地。
59.上述碳化硅基场效应管q2、q3、q4电性连接的母线电源接口的电压输出端dc+经过并联的电源滤波电容c38、c39、c40、c41、c42、c43接地。
60.碳化硅功率模块还包括测温热敏电阻rt1,测温热敏电阻rt1的两端分别与碳化硅功率模块的温度检测端t1和t2电性连接。
61.在本发明的一个可选实施例中,如图1和图7所示,驱动器电路还包括电压测量模块,电压测量模块包括隔离式模数转换器u3;电压测量模块作为隔离测量输入电压,并且将电压模拟值转换成数字值,并通过spi总线输出。电压测量模块采用带可编程负载的隔离式adc,可以隔离测量较高的母线电压,便于配合碳化硅器件的较高工作电压使用。
62.母线电源接口的电压输出端dc+经过输入整流二极管d1分别与依次串联的输入分压电阻r12、r13、r14、调试电阻r15和由电感磁珠e1和场效应管q1构成的可编程电子负载电路电性连接;具体而言,母线电源接口的电压输出端dc+与输入整流二极管d1的正极电性连接,输入整流二极管d1的负极分别与电感磁珠e1的一端及依次串联的输入分压电阻r12、r13、r14、调试电阻r15电性连接,电感磁珠e1的另一端与场效应管q1的漏极电性连接;调试电阻r15的一端经过并联的分压采样电阻r17和滤波电容c10与隔离式模数转换器u3的接地
引脚1电性连接,调试电阻r15的另一端经过滤波电容c11与隔离式模数转换器u3的接地引脚1电性连接,并与隔离式模数转换器u3的电容输入引脚5电性连接;场效应管q1的栅极经过门极限流电阻r23与隔离式模数转换器u3的门极引脚2电性连接,且经过门极驱动信号滤波电容c17接地;场效应管q1的源极经过负载输入端滤波电容c16接地,且与隔离式模数转换器u3的负载输入引脚3电性连接。
63.隔离式模数转换器u3的ldo输出引脚7经过并联的电源滤波电容c18和c19接地;隔离式模数转换器u3的二次电源引脚9经过并联的电源滤波电容c20和c21接地;隔离式模数转换器u3两侧的电源地之间连接隔离电容c26,用于两侧静电的泄放。
64.隔离式模数转换器u3的电压检测信号输出引脚17、18、19、20经过由电阻r19、r20、r21、r22与电容c12、c13、c14、c15构成的rc低通滤波器与排线信号接口的电压检测信号接口电性连接,用于对连接隔离式模数转换器u3的spi总线进行滤波;具体而言,隔离式模数转换器u3的电压检测信号输出引脚20经过电阻r19与排线信号接口的电压检测信号接口miso电性连接,且经过电容c15接地;隔离式模数转换器u3的电压检测信号输出引脚19经过电阻r20与排线信号接口的电压检测信号接口misi电性连接,且经过电容c14接地;隔离式模数转换器u3的电压检测信号输出引脚18经过电阻r21与排线信号接口的电压检测信号接口sclk电性连接,且经过电容c13接地;隔离式模数转换器u3的电压检测信号输出引脚17经过电阻r22与排线信号接口的电压检测信号接口csb电性连接,且经过电容c12接地。
65.隔离式模数转换器u3的中断引脚15经过上拉电阻r16与第三供电端电性连接;隔离式模数转换器u3的地址配引脚16分别经过地址配电阻r18与第三供电端电性连接及地址配电阻r24接地;所述隔离式模数转换器u3的主电源输入引脚与第三供电端电性连接,并经过并联的电源滤波电容c22和c23接地;所述隔离式模数转换器u3的ldo侧电压输入引脚经过并联的电源滤波电容c24和c25接地。
66.在本发明的一个可选实施例中,如图1和图8所示,驱动器电路还包括温度保护电路模块,温度保护电路模块包括双运算放大器u1a和单运算放大器u2;温度保护电路模块用于实现温度测量和保护的功能,当碳化硅功率模块温度过高时,会输出低电平,促使隔离电路停止工作,切断pwm驱动信号,从而保护所述碳化硅功率模块的温度。
67.双运算放大器u1a的同相输入端3经过分压电阻r1和r7构成的分压电路与第三供电端电性连接,为双运算放大器u1a的同相输入端3提供比较参考电压,并且经过滤波电容c9接地;具体而言,双运算放大器u1a的同相输入端3经过分压电阻r1与第三供电端电性连接,同时经过分压电阻r7接地,并且经过滤波电容c9接地。
68.双运算放大器u1a的反相输入端2与由分压电阻r3、碳化硅功率模块的温度检测端t1和t2构成的分压电路与第三供电端电性连接,且经过滤波电容c6接地,将温度值转化成电压量通过滤波电容c6输入到双运算放大器u1a的反相输入端2;具体而言,双运算放大器u1a的反相输入端2经过分压电阻r3与第三供电端电性连接,同时经过滤波电容c6接地,并且与碳化硅功率模块的温度检测端t1电性连接,
69.双运算放大器u1a比较的电压输出为高低电平的逻辑,其输出端经过上拉电阻r2与第三供电端电性连接,且经过滤波电容c8接地,并经过调试电阻r4与四通道数字隔离器u9和四通道数字隔离器u10的过温保护端en电性连接。
70.双运算放大器u1a的输出端还经过串联的电阻r5与发光二极管dp1构成的指示灯
电路接地,用于指示当前温度保护状态;具体而言,双运算放大器u1a的输出端经过电阻r5与发光二极管dp1的正极电性连接,发光二极管dp1的负极接地。
71.双运算放大器u1a的电源端与第三供电端电性连接,且经过滤波电容c5接地。
72.单运算放大器u2用于作为温度反馈电路,其同相输入端经过调试电阻r6与双运算放大器u1a的同相输入端电性连接,并经过调试电阻r9接地。
73.单运算放大器u2的反向输入端经过电压反馈电阻r10和r11构成的电压反馈电路与单运算放大器u2的输出端电性连接,用于配置单运算放大器u2的放大倍数,输入电压值经过单运算放大器u2放大两倍后,再经过限流电阻r8后输出;具体而言,单运算放大器u2的反向输入端分别与电压反馈电阻r10和r11电性连接,电压反馈电阻r10的另一端与单运算放大器u2的输出端电性连接,电压反馈电阻r11的另一端接地。
74.单运算放大器u2的输出端经过限流电阻r8与排线信号接口的电压反馈接口temp电性连接;单运算放大器u2的电源端与第三供电端电性连接,且经过滤波电容c7接地。
75.在本发明的一个可选实施例中,如图1和图9所示,驱动器电路还包括电流测量电路,电流测量电路包括霍尔磁电流传感器u4、u5和u6,均带有spi总线接口输出,主要作为对碳化硅功率电路输出的u、v、w三相电机驱动电流进行精密隔离测量,并且可以通过spi总线和处理器进行通信,在各路相电流过电流情况下可以实现过流保护。用于伺服电机闭环控制的电流环需要测量电机的相电流以达到输出转矩控制,在相电流测量电路环节采用霍尔磁电流传感器,降低了传统电阻电流采样的温度变化误差,缩小了驱动器的体积,在降低损耗同时还提高了测量精度。本发明对电流传感器的具体形式并不作限定,只要能够将模拟电流量转换成为总线数字信号就可以,并且具有较高的测量精度。例如,电流传感器可以是电阻式电流传感器,使用电阻进行测量,并且通过模数转换器转换。
76.霍尔磁电流传感器u4的电流检测引脚7和8分别与碳化硅功率模块的三相交流电输出接口u及电机的三相交流电输入接口a电性连接;霍尔磁电流传感器u4的电源输入引脚2与第三供电端电性连接,且经过输入电源滤波电容c27接地;霍尔磁电流传感器u4的电流量反馈引脚3与排线信号接口的电流检测接口dout1电性连接,且经过上拉电阻r25与第三供电端电性连接;霍尔磁电流传感器u4的过流保护输出引脚6与排线信号接口的电流检测接口ocd1电性连接,且经过上拉电阻r26与第三供电端电性连接;上拉电阻r25为霍尔磁电流传感器u4的spi总线的dout接口提供上拉电压,上拉电阻r26为霍尔磁电流传感器u4的过流保护输出信号提供上拉电压。
77.霍尔磁电流传感器u5的电流检测引脚7和8分别与碳化硅功率模块的三相交流电输出接口v及电机的三相交流电输入接口b电性连接;霍尔磁电流传感器u5的电源输入引脚2与第三供电端电性连接,且经过输入电源滤波电容c28接地;霍尔磁电流传感器u4的电流量反馈引脚3与排线信号接口的电流检测接口dout2电性连接,且经过上拉电阻r27与第三供电端电性连接;霍尔磁电流传感器u4的过流保护输出引脚6与排线信号接口的电流检测接口ocd2电性连接,且经过上拉电阻r28与第三供电端电性连接;上拉电阻r27为霍尔磁电流传感器u4的spi总线的dout接口提供上拉电压,上拉电阻r28为霍尔磁电流传感器u4的过流保护输出信号提供上拉电压。
78.霍尔磁电流传感器u6的电流检测引脚7和8分别与碳化硅功率模块的三相交流电输出接口w及电机的三相交流电输入接口c电性连接;霍尔磁电流传感器u6的电源输入引脚
2与第三供电端电性连接,且经过输入电源滤波电容c29接地;霍尔磁电流传感器u4的电流量反馈引脚3与排线信号接口的电流检测接口dout3电性连接,且经过上拉电阻r29与第三供电端电性连接;霍尔磁电流传感器u6的过流保护输出引脚6与排线信号接口的电流检测接口ocd3电性连接,且经过上拉电阻r30与第三供电端电性连接;上拉电阻r29为霍尔磁电流传感器u4的spi总线的dout接口提供上拉电压,上拉电阻r30为霍尔磁电流传感器u4的过流保护输出信号提供上拉电压。
79.根据上述描述的一种力控关节碳化硅单管驱动器电路,当其工作时,由接口电路模块提供电源和输入驱动信号,接口电路模块可以与关节控制器连接,控制器输出svpwm驱动信号。母线电源经过电源电路模块降压后分别对隔离电路模块和驱动电路模块提供电压。同时电压测量模块测量母线输入电压,并通过spi总线输出给接口电路模块。驱动信号经过隔离电路模块隔离后,输出给驱动电路模块进行放大,放大后的信号就可以驱动碳化硅功率模块中的碳化硅mos管工作。由六个碳化硅场效应管组成的碳化硅功率模块就可以产生由直流逆变的三相交流电,就可以驱动无框力矩电机转动,从而起到电机驱动器的功能。无框力矩电机安装的霍尔元件检测到转子的旋转,并把信号输出到隔离电路模块。在无框力矩电机和碳化硅功率模块之间还设计有电流测量模块,可以测量电机三相各相的相电流,并将电流量转换为数字量通过spi总线从接口电路模块输出,将数据反馈给控制器实现电机电流环控制。同时碳化硅功率模块连接温度保护电路模块,对碳化硅功率模块的温度测量和进行保护,同时将温度电压值反馈给接口电路模块。综上所述,本发明提供的一种力控关节碳化硅单管驱动器电路构成了完整的伺服电机驱动,并且具有高功率密度比的碳化硅功率电路。本发明中电机驱动硬件结构适宜采用foc矢量控制技术作为驱动方法,通过svpwm信号驱动无框力矩电机,降低了电机的振动,同时采用霍尔换向,提高了电机启动的平滑程度,便于应用于医疗机器人。
80.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1