一种自寻优的电流解耦控制方法
本发明涉及电流解耦换流方法领域,尤其涉及一种自寻优的电流解耦控制方法。
背景技术:
1、机械惯性大的缺点,限制了相关领域的发展。而磁浮式平台因其零摩擦、不存在运动迟滞、具有良好的真空兼容性等优势,已成为精密运动平台的主要研究方向之一。
2、但磁浮式平台也存在步进速度慢,定位系统精度低,多电流控制损耗大等问题。
3、目前国内广泛运用的单点换流方法是基于梯度下降的换流算法,也被称为最速下降法,其本质是沿梯度下降的方向求解最小值,从而找到最小功耗的解;基于启发式优化算法的换流算法,在最优化算法的基础上,在算法实施前,设置适应度函数和约束条件。
4、对于连续换流方法,目前大多数磁悬浮平面电机使用的仍是基于2范数的换流方法,这和单点优化的不同之处在于其首先考虑到的就是使线圈阵列整体的发热量降低,同时保证各电流没有超过线圈电流的物理最大值。
5、基于2范数的电流换流方法,在控制全局热功耗的情况下,忽视了各个线圈的热损耗的均匀程度,会出现线圈阵列在电机长期运行过程中,部分线圈长期处于高负载状态,严重影响到部分线圈的使用寿命。其次,各个线圈阵列的散热结构是一致的,如果个别线圈发热严重会导致其散热装置无法及时散热,而散热结构的设计如果过于复杂也会影响到电机的运动特性,这种方法只是优化了整个线圈阵列的热功耗,但对于其中各个线圈的电流的最大值并没有加以限制,在有些情况下,该方法中求取伪逆的过程可能会造成线圈的电流超过驱动中运放的物理限制,造成电机系统的损坏。而线圈自己也可能处于过载状态,影响到电机的物理特性,造成系统的控制误差加大。
6、基于无穷范数的换流方法:虽提前限定电流最大值,但基于无穷范数的换流方法并没有具体的方法求取电流上限,一般都是凭借尝试或者经验给出,从算法稳定性的角度来看,如果选取的imax不合适,那么在算法运行过程中,超限的线圈个数一旦数量较多,算法可能会无法得出满足条件的解。此外,算法极限imax选取的不合适也会导致线圈阵列的总体热功耗上升。因此提出一种自寻优的电流解耦控制方法。
技术实现思路
1、本发明的目的在于提供一种自寻优的电流解耦控制方法,解决了现有的磁浮式平台多点六控制损耗大,同时导致平面电机运行不稳定的问题的问题。
2、为实现上述目的,本发明提供如下技术方案:一种自寻优的电流解耦控制方法,包括以下步骤:
3、s1:利用基于最小2范数的换流方法先求的初始电流,最终线圈电流可表示为:
4、
5、s2:在此基础上,对最小2范数得出的初始电流进行分类挑选,将其分为i01和i02,他们分别满足的要求为:
6、
7、对于电流最大值的计算:采用迭代算法搜寻imax,具体算法如下:
8、1)计算行程中某一位置的映射矩阵t(q)的伪逆t2(q),然后利用2范数的方法求解出该方法下的电流值ij;
9、2)将ij中的电流值和电流最大值作比较,如果有电流值超过最大电流,则进行下一步,否则算法结束;
10、对线圈阵列中所有电流ij进行处理,得到新的电流ic,处理过程如下式所示:
11、
12、计算新的力旋量矢量和新的映射矩阵,其中l2wdes的表带是如下式所示:12t(q)是将映射矩阵t(q)中对应电流ic为非零元素的列改为0后得到:
13、l2wdes=wdes-γ(q)ic
14、5)利用伪逆,结合步骤4中的参数得到一个新的电流矢量i,它的具体计算表达式为:
15、l2γ(q)l2i=l2wdes
16、6)最终的电流矢量为步骤3和步骤5所求得的电流矢量之和:
17、l2ic=l2i+ic
18、7)返回第2步检查电流是否满足小于最大电流的要求,若满足,则算法结束;若不满足,继续迭代;
19、s3:获得电流最大值后,对分类好的电流进行相应的处理,对于i02,其电流值直接取电流上限,电流方向保持不变,即:
20、i2=sgn(io2)imax;
21、s4:接下来求取另一部分电流i1,该部分电流需要满足的条件为:
22、wdes=γ1(q)i1+γ2(q)i2
23、其中t1(q)和t2(q)为电磁力和力矩映射矩阵t(q)与两部分电流对应的分块矩阵,因此,电流i1的表达式可以基于2范数的换流方法求出,其具体表达式为:
24、
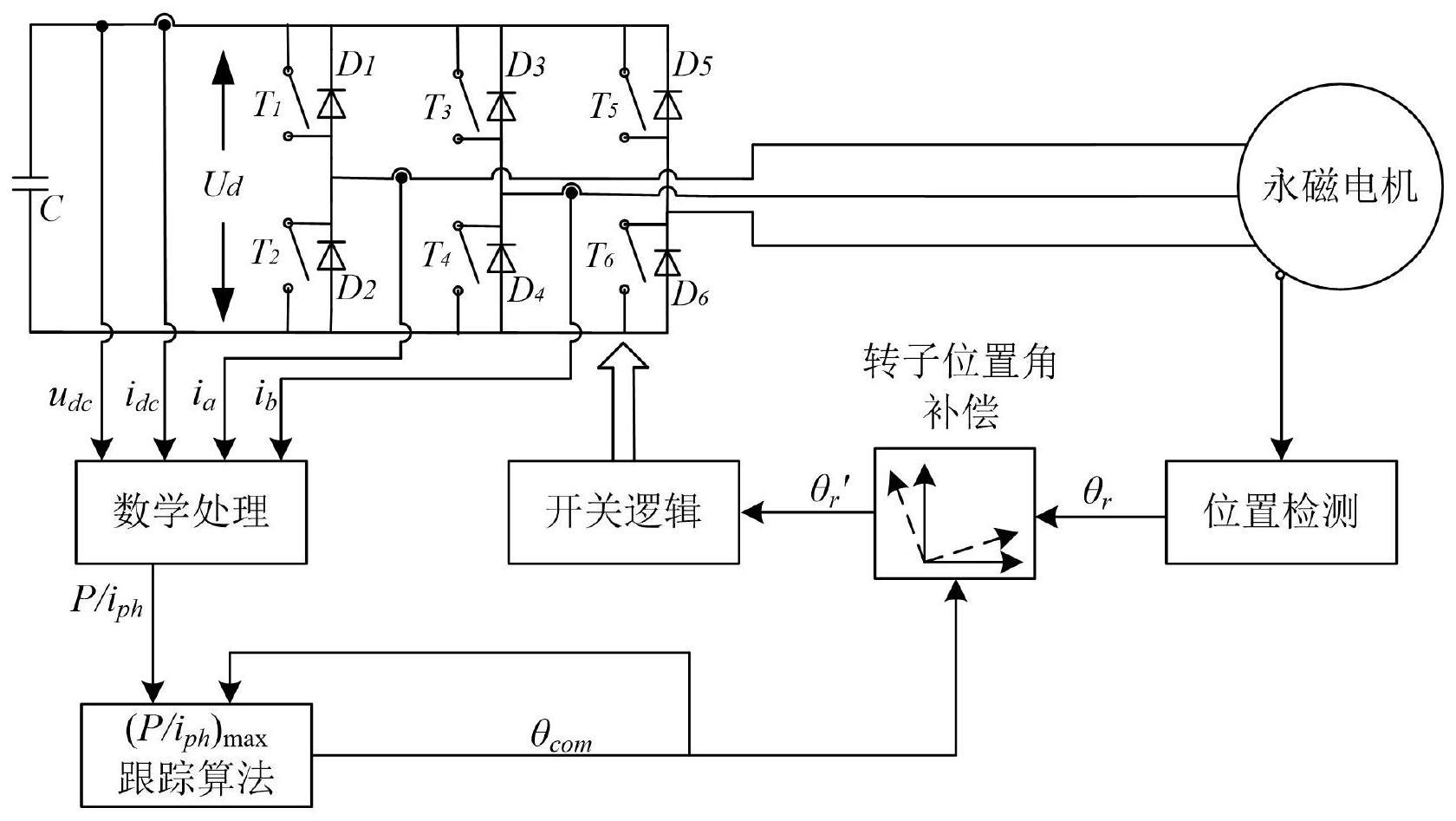
25、s5:在数学处理模块连接功率变换器,并通过检测得到平面电机的母线电压、母线电流和相电流,进而可计算得到此时控制电流的有功功率;
26、s6:给定平面电机功率因数角一个基本初值,即设定一个自寻优起始位置,在相同时间间隔内,分别计算有功功率自身变化量δp或相电流自身变化量δi或功率因数角本身的变化量δφ;
27、s7:根据上一步骤计算得到的两个变化量的变化方向,来决定下一个调节周期功率因数角的调节方向;
28、s8:据比较后的信号构造开关逻辑,并根据该构造的开关逻辑控制调节过程的进行和分配;
29、s9:重复执行,使控制电流不断进行最优电流分配的比较,使控制电流最终趋于最大利用率的工作状态。
30、优选的,所述s1中为了实现一个连续的线圈换流,引入基于2范数的换流方法,可知线圈阵列的p最小就是各个线圈的电流的平方和最小,换而言之即电流的二范数最小,这样就把优化的目标转移到了通过最小化电流范数来实现,即:
31、
32、其中t2(q)为矩阵t(q)自反广义逆,为了求解这矩阵的解析值,引入矩阵t(q)的伪逆的概念,具体表达式为:
33、
34、进而得到最终线圈电流:
35、
36、优选的,所述s4中已经在保证热损耗小的前提下保证全局电流不会出现局部过流的情况。
37、优选的,所述s7中根据上一步骤计算得到的两个变化量的变化方向,来决定下一个调节周期功率因数角的调节方向,比如,当δi>0时,δp>0,说明此时在还未达到电流利用率最大值,则下一调节周期的电流继续增大,并更新功率因数角,若当δi>0时,δp<0,则说明已过电流利用率最高点,则下一调节周期的电流减小,并结束自寻优过程。
38、与相关技术相比较,本发明提供的一种自寻优的电流解耦控制方法具有如下有益效果:
39、1、本发明提供一种自寻优的电流解耦控制方法,相较于基于无穷范数的换流方法,基于无穷范数的换流方法并没有具体的方法求取电流上限,一般都是凭借尝试或者经验给出,本作品中,依靠迭代算法搜寻全局电流上限,可在限制全局热功耗的前提下,避免电流出现局部过流的情况。
40、2、本发明提出一种自寻优的电流解耦控制方法,其基于最大电流利用率追踪的自寻优解耦换流方法,以功率因数角或电流分配作为直接调节的控制信号,选择相电流或有功功率作为反馈的观测信号,追寻电流利用率最高点,择优选择电流解耦方案。
41、3、本发明提出一种自寻优的电流解耦控制方法,其结合迭代算法和追踪电流利用率最高点,可以限制全局热功耗的大小,又可以限制线圈阵列中每一个线圈电流的最大值来保护驱动安全性,获得电流分配的最优解。保证全局热损耗最小且无局部过流,避免热量对平台电磁特性的影响,实现平台运动稳定。
42、使得本方法使用迭代算法计算电流上限,同时实时追踪电流利用率最高点,择优选择电流解耦方案。保证全局热损耗最小且无局部过流,避免热量对平台电磁特性的影响,实现平台运动稳定。
- 还没有人留言评论。精彩留言会获得点赞!