二自由度重力辅助式压电惯性平顺位移台及驱动方法
本发明涉及精密定位领域,具体涉及一种二自由度重力辅助式压电惯性平顺位移台及驱动方法。
背景技术:
1、精密定位作为一项关键技术,已成为先进工业领域的研究热点。作为精密定位平台的主要驱动机构之一,压电驱动器具有高精度、快速响应和极强的环境适应性,已广泛应用于航空航天、生物工程、医疗设备、材料科学、光学工程等领域。与其他压电步进型驱动器相比,如尺蠖和行波驱动器,压电惯性驱动器更易于集成和控制,因为它们仅通过一个激励源即可实现运动。通常,压电惯性驱动器通过周期性步进运动实现长行程和高分辨力。然而,滑阶段的摩擦将会导致不希望的位移回退运动。这一问题导致驱动器稳定性降低,并限制了其在细胞微操作工程、光学工程等方面的应用。因此,关于解决位移回退运动的研究已经陆续进行。相关研究通常分为三个方面:摩擦材料改性、驱动波形优化和驱动机构改进。目前,通过上述三种方式的研究均无法仅通过激励单个压电元件实现压电惯性驱动器单自由度的双向平顺驱动。
2、关于解决压电惯性驱动器位移回退的技术主要分为三大类:摩擦材料改性、驱动波形优化和驱动机构改进。目前通过摩擦材料改性的方式主要为化学微加工处理和激光纹理加工,这两种方式都可以使材料表面具备各向异性,这些特殊处理提高了一个方向的输出性能,却劣化了另一个方向。驱动波形优化方面可以同时改善正反双向的输出性能,但是却无法完全消除位移回退运动。目前,现有的通过驱动机构改进的技术方案通过多个激励源实现了压电惯性驱动器单自由度的双向平滑驱动,但仍然无法通过单个激励源实现。
技术实现思路
1、本发明针对传统压电惯性驱动平台的位移回退问题,提供了一种二自由度重力辅助式压电惯性平顺位移台及驱动方法。
2、本发明的技术方案如下:
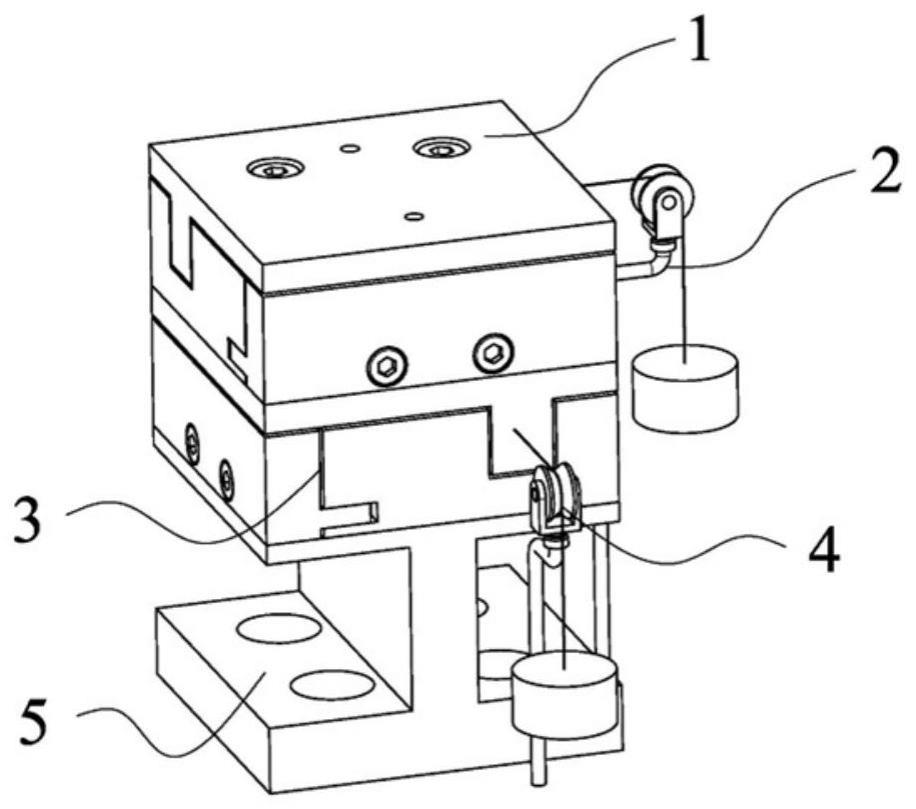
3、本发明提供了一种二自由度重力辅助式压电惯性平顺位移台,包括底部安装基座、结构完全相同的两个自由度位移台、以及结构完全相同的两个自由度重力辅助组件;所述两个自由度位移台分别为x自由度位移台和y自由度位移台;所述两个自由度重力辅助组件分别为x自由度重力辅助组件和y自由度重力辅助组件;所述y自由度位移台安装于底部安装基座之上,所述x自由度位移台安装于y自由度位移台之上形成二自由位移台的主体,x自由度位移台与y自由度位移台的位移方向互相垂直;
4、所述自由度位移台包括半球头压电堆叠、复合式柔性铰链机构、基米螺钉、自由度预紧板、自由度平台机架、摩擦半球头、导轨组件以及自由度平台装配板;所述导轨组件包括固定导轨、十字交叉滚柱支架以及运动导轨;固定导轨以及运动导轨与十字交叉滚柱支架通过型槽装配;所述固定导轨固定于自由度平台机架之上;所述基米螺钉将半球头压电堆叠固定于复合式柔性铰链机构之中,通过基米螺钉调节半球头压电堆叠与复合式柔性铰链机构之间的预紧力,摩擦半球头与复合式柔性铰链机构胶粘连接,所述自由度预紧板装配在自由度平台机架上并使摩擦半球头与运动导轨顶紧,复合式柔性铰链机构固定于自由度平台机架上;所述自由度平台装配板固定于运动导轨之上,并随运动导轨的运动产生位移。
5、作为本发明的优选方案,所述自由度重力辅助组件包括定滑轮支架、定滑轮固定销、定滑轮、软绳、重物以及重力辅助支架杆组成;所述重力辅助支架杆设有轴承避让槽、轴承安装槽、支架横杆以及支架竖杆;所述转动轴承外圈与轴承安装槽之间过盈配合,轴承避让槽的开设用于避免轴承内圈转动时与定滑轮支架产生干涉;所述定滑轮固定销采用过盈配合将定滑轮固定于定滑轮支架上,所述定滑轮支架与转动轴承内圈过盈配合;软绳的一端通过定滑轮与重物连接,另一端与自由度平台装配板连接;将重力辅助支架杆底部固定。
6、作为本发明的优选方案,所述复合式柔性铰链机构包括柔性铰链梁、圆型柔性铰链以及柔性铰链底部凸台;四个柔性铰链梁与两个圆型柔性铰链组成具有空腔的多边形结构,多边形结构内安装有所述半球头压电堆叠,多边形结构一侧设置有柔性铰链底部凸台,正对的另一侧连接有运动导轨。所述四个柔性铰链梁具体为柔性铰链前梁、柔性铰链左侧梁、柔性铰链后梁以及柔性铰链右侧梁;柔性铰链前梁上开设有摩擦半球头安装槽,摩擦半球头嵌入摩擦半球头安装槽内;两个圆型柔性铰链开设于柔性铰链左侧梁的前端,柔性铰链右侧梁采用弯折型设置;柔性铰链侧凸台上设有用于固定复合式柔性铰链机构的柔性铰链固定沉头孔;所述基米螺钉拧入柔性铰链后梁之上的基米螺钉安装螺纹孔将半球头压电堆叠固定于复合式柔性铰链机构中;柔性铰链底部凸台的用于避免半球头压电堆叠驱动复合式柔性铰链机构振动时与自由度平台机架产生干涉。
7、作为本发明的优选方案,所述自由度平台机架设有固定导轨安装槽、预紧板安装面、柔性铰链安装孔、预紧板调节导向槽、封装侧板、平台固定孔和运动导轨避让槽;所述自由度预紧板包括预紧板外表面、预紧板内表面、预紧板导向块以及预紧板避让槽;所述固定导轨安装于固定导轨安装槽内,复合式柔性铰链机构通过柔性铰链安装孔安装在自由度平台机架上;预紧板安装面上设有一组对称布置的预紧板调节螺纹孔,所述预紧板导向块型槽与预紧板调节导向槽采用型槽配合,自由度预紧板上开设有预紧板安装沉头孔,螺钉穿过预紧板安装沉头孔拧入预紧板调节螺纹孔使预紧板避让槽顶住柔性铰链后梁进而调节摩擦半球头与运动导轨之间的锁紧力;之后采用螺钉穿过柔性铰链固定沉头孔并拧入柔性铰链安装孔将复合式柔性铰链机构固定于自由度平台机架上;封装侧板设于自由度平台两侧用于封装。
8、作为本发明的优选方案,所述自由度平台装配板包括运动导轨固定沉头孔、平台装配板上表面、平台装配板安装螺纹孔、运动导轨安装凸台;自由度平台装配板上开设有用于运动导轨固定沉头孔与平台装配板安装螺纹孔,螺钉穿过运动导轨固定沉头孔并拧入运动导轨,所述运动导轨安装凸台与运动导轨接触,以避免自由度平台装配板和运动导轨同时驱动时与固定导轨产生干涉;所述平台装配板安装螺纹孔用于载物体的装配。
9、作为本发明的优选方案,所述底部安装基座包括基座装配面、基座装配螺纹孔、基座安装避让槽以及基座安装孔,所述y自由度位移台装配在基座装配面之上,并通过螺钉连接穿过y自由度位移台拧入基座装配螺纹孔进行固定连接;开设基座安装避让槽预留出螺钉安装操作空间,所述基座安装孔用于将底部安装基固定。
10、本发明还提供了一种上述二自由度重力辅助式压电惯性平顺位移台的驱动方法,通过单个自由度位移台实现了单个自由度的双向平滑驱动,通过两个自由度位移台结构串联的方式实现x、y两个自由度的双向平顺驱动,x自由度位移台和y自由度位移台的工作原理相同;
11、在x自由度位移台中,规定沿x自由度负方向的运动为正向运动,位移台由占空比为100%的锯齿波驱动以实现正向运动;在不考虑重物自重时,具体分为以下三个阶段:
12、粘阶段:在粘阶段开始时间t0到结束t1时间内,激励电压逐渐升高;复合式柔性铰链机构在半球头压电堆叠的作用下缓慢伸长,法向压力fn随寄生运动而增加,运动导轨在静摩擦fs下产生向前运动δxend;
13、滑阶段:电压在粘阶段的最后t1时刻迅速下降,由于半球头压电堆叠的响应速度比复合式柔性铰链机构的响应速度快,因此半球头压电堆叠与复合式柔性铰链机构分离,然后在极短的时间δt内收缩到最小值;在定子的装配预加载和粘阶段的寄生运动之后,复合式柔性铰链机构像一个拉伸的弹簧。当复合式柔性铰链机构的弹性恢复力大于或等于半球头压电堆叠和复合式柔性铰链机构之间的接触力时,法向压力fn和动摩擦力fd几乎为零,在这种情况下,运动导轨没有位移回退产生;半球头压电堆叠和复合式柔性铰链机构之间的接触力与摩擦半球头和运动导轨之间的锁紧力对摩擦有重要影响;
14、震荡阶段:半球头压电堆叠从时间t1+δt开始再次缓慢伸长;随后,由于弹性恢复力,复合式柔性铰链机构收缩并与半球头压电堆叠碰撞;由于阻尼和碰撞能量损失,振动将迅速衰减;复合式柔性铰链机构产生的振动将从摩擦半球头传递到运动导轨;此时摩擦力fc随振荡而变化;向前驱动力在第一次碰撞时最为显著,将会导致运动导轨产生位移激增运动。在时间tc1时刻,复合式柔性铰链机构和半球头压电堆叠之间的接触变得稳定,位移台运动开始进入下一个周期;
15、位移台由占空比为0%的锯齿波驱动以实现反向运动;与正向运动不同,由于半球头压电堆叠的缓慢收缩,半球头压电堆叠和复合式柔性铰链机构保持接触;t0~t0+δt时间段为滑阶段,半球头压电堆叠快速伸长,摩擦半球头与运动导轨之间的动摩擦将导致运动导轨产生显著的位移回退;t0+δt~t1时间段为粘阶段,半球头压电堆叠缓慢收缩,摩擦半球头与运动导轨之间产生静摩擦力带动运动导轨沿产生一大步位移给运动,之后进入下一个周期运动;
16、在考虑重物自重时,即使施加重物的负载,由于运动导轨及负载的惯性和该阶段极短的时间,也不会产生位移后退运动;当所述自由度位移台正向运动滑动阶段的摩擦接近0时,位移台应用反向辅助重力用于抑制反向运动的位移后退运动并缓解正向运动产生的位移激增;通过电压偏置来调节摩擦半球头与运动导轨之间的锁紧力;在正向驱动中,电压偏置增加以提高平滑运动下的负载容量上限;在反向驱动中,电压偏置减小,以削弱滑动阶段的摩擦,并通过重物的自身总重力fg进行平衡。
17、与现有技术相比,本发明具有以下有益效果:
18、1)本发明提出了一种二自由度重力辅助式压电惯性平顺位移台及驱动方法,通过单个激励源实现了单个自由度的双向平滑驱动,通过结构串联的方式实现x、y两个自由度的双向平顺驱动。
19、2)本发明所提出的二自由度重力辅助式压电惯性平顺位移台通过增设重物,利用重力辅助的方式改善了双向一致性。
20、3)本发明在主动光学、超分辨率成像样品移动、微纳装配及制造、集成电路制造与检测、扫描电镜样品操纵、大范围电子束直写、纤维及纳米ct、高真空样品精度对准及调姿、纳米聚焦与扫描等领域中具备极大的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!