一种无人遥控玉米全收获机器人系统的制作方法
1.本发明涉及一种无人遥控玉米全收获机器人系统。
背景技术:
2.在传统玉米收获产业中,传统玉米收割机体积庞大,工作时只能将玉米果实与玉米秸秆分离且玉米秸秆通常进行粉碎还田或者收集起来做成青贮饲料,并没有将玉米秸秆的资源最大化利用,造成了许多资源的浪费。
3.本发明将玉米秸秆收割、玉米果实收获、玉米秸秆叶、穰、皮与硬节的组分分离等功能结合在一起。
4.本发明将玉米秸秆收储与组分分离整合在一起,在田地里对玉米收获一步化收获,减少玉米秸秆综合利用工业园对于玉米秸秆处理所需场地消耗,节约产业园占地面积。
5.现有传统玉米收获设备仅限于将田地里的玉米秸秆上的玉米果实收获,并将玉米秸秆打碎制作青贮发酵饲料或打碎还田,不能将玉米秸秆资源利用最大化。
技术实现要素:
6.本发明的目的就是针对现有技术的不足,提出一种无人遥控玉米全收获机器人系统。通过对玉米收获、玉米秸秆回收以及玉米秸秆各组分分离,以解决节约人员劳动力,节约场地增加设备,提高玉米收获效率,增加玉米秸秆资源利用。
7.为实现上述目的,本发明采用如下方案。
8.一种无人遥控玉米全收获机器人系统包括无人遥控机器人和地头工作站,其中无人遥控机器人包括玉米秸秆夹持切断机构,去玉米秸秆叶和果实机构,去硬节和去穰机构,地头工作站包括各组分粉碎机构、膨胀机构、造粒机构。
9.进一步,所述无人遥控机器人通过电力驱动,在农田内对玉米秸秆进行收获与组分分离。
10.进一步,所述无人遥控机器人在工作时,由主动旋转胶辊与从动旋转胶辊组成的玉米秸秆去叶及穗装置在切断装置将玉米秸秆从根部切断后将玉米秸秆的叶及穗利用胶辊的摩擦力扭断切下。
11.进一步,所述无人遥控机器人的玉米秸秆去叶及穗装置中的从动胶辊为仿手形结构,在玉米秸秆进入玉米秸秆去叶及穗装置后不会因为从动胶辊挤压力过大使玉米穗压碎。
12.进一步,所述无人遥控机器人的玉米秸秆去叶及穗装置,该装置将玉米秸秆叶及穗扭断切下后,由转动拨杆拨动已去叶及穗后的玉米秸秆将其送入去硬节与皮穰分离装置。
13.进一步,所述无人遥控机器人的玉米秸秆去叶及穗装置,在将玉米秸秆叶及穗去除后,被扭下的叶及穗通过主动胶辊与从动胶辊旋转产生的摩擦力旋转向上运送到顶部的旋转传输装置。
14.进一步,所述无人遥控机器人的顶部旋转传输装置,将玉米秸秆叶及果实向后方传动并送入过滤筛网,筛网的空隙可将玉米秸秆叶与穗分离开。
15.进一步,所述无人遥控机器人的玉米秸秆去叶及穗机构,将玉米秸秆的叶与穗去除后,传输机构将玉米秸秆送入玉米秸秆去穰及硬节机构。
16.进一步,所述无人遥控机器人的去硬节及皮穰分离装置,每一组由三对传动轮、一个扶持轮、去硬节刀具及皮穰分离剖刮一体刀具组成。
17.进一步,所述无人遥控机器人的玉米秸秆去穰及硬节机构由剖刮一体刀具、弹性自适应装置、双铡刀、限位装置等组成,以完成夹持,去硬节,去穰等步骤。
18.进一步,所述无人遥控机器人的玉米秸秆去穰去硬节机构,将去叶去果实的玉米秸秆夹持后,送入去硬节机构的双闸刀部,弹性自适应滚轮在滚动经过玉米秸秆硬节时发生瞬时形变,双铡刀工作,将玉米秸秆硬节切下。
19.进一步,所述无人遥控机器人的玉米秸秆去穰去硬节机构中双铡刀将玉米秸秆硬节切除后,由传动轮将切下硬节的玉米秸秆送入皮穰分离机构,去穰机构的剖刮一体刀具与弹性自适应连杆相连,剖刮一体刀具从去硬节后的玉米秸秆中线入刀,双犁形的刀刃在将玉米秸秆切开展平的同时,将玉米秸秆穰从玉米秸秆皮内刮下。
20.进一步,所述无人遥控机器人的玉米秸秆去叶去果实机构及玉米秸秆去穰去硬节机构将玉米秸秆各组分分离后,将各组分分别收储在运输设备中送往地头的工作站。
21.进一步,所述无人遥控机器人系统的地头工作站包括膨化造粒机,粉碎机及压块机。
22.进一步,所述无人遥控系统的地头工作站将收获的玉米秸秆各组分粉碎膨化后造粒,方便玉米秸秆的运输与处理。
附图说明
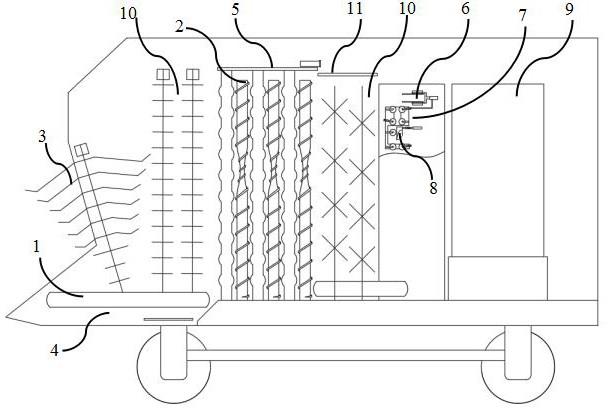
23.图1是本发明无人遥控机器人的田间操作主体结构图。
24.图2是本发明无人遥控机器人的去叶及果实机构示意图。
25.图3是本发明无人遥控机器人的双刀去硬节机构结构与剖刮一体刀具示意图。
26.图4是本发明无人遥控机器人的主转动滚轮与从转动滚轮结构示意图。
27.图1中1-夹持及切断装置;2-去叶及穗装置;3-扶持爪;4-定位传感器;5-传动带;6-双刀去节装置;7-剖刮一体刀具;8-传动滚轮;9-控制模块;10-转动拨杆;11-筛网。
28.图2中12-主转动胶辊;13-从动胶辊;14-传动链条;15-弹性自适应装置。
29.图3中16-剖切刃口;17-犁形刃口;18-弹性自适应杆;19-切刀;20-联动机构;21-形变传感器;22-主转动滚轮;23-从转动滚轮;24-扶持轮。
30.图4中25-主转动滚轮;26-从转动滚轮;27-防滑槽。
具体实施方式
31.为本发明的工作方案与创新技术叙述更加清楚,下面将对本发明的技术方案进行详细的描述。所描述的实例仅仅是本发明多种实施方案中的一部分实施例,而不是全部的实施例。基于本发明中的所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本
文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
32.如图1所示,本发明提供了一种全新的无人遥控玉米收获机器人,其工作流程如下,首先,无人遥控玉米全收获机器人在农田中,定位传感装置4扫描定位每颗玉米秸秆植株的节位,扶持爪3将玉米秸秆归拢扶持,切断装置1从玉米秸秆植株底部将其切断。随着切断装置1将玉米秸秆切断后,玉米秸秆收获机器人向前运动,将玉米秸秆经过扶持爪3送入去叶及果实装置2中,去叶及果实装置2的主转动胶辊12与从动胶辊13将玉米秸秆卷入,主转动胶辊12由顶部传动链条14带动,去叶及果实装置2的主转动胶辊12与从动胶辊13将玉米秸秆卷入扭转,弹性自适应装置15根据玉米秸秆的粗细将从动胶辊13压紧,为扭断玉米秸秆叶及果实增大摩擦力,主转动胶辊12与从动胶辊13将玉米秸秆叶及穗扭断后,去除后的叶及果实在胶辊的转动下传送至顶部的传动带5上,顶部传动带5将玉米秸秆叶与穗传输至筛网11并将其分离,经过去叶及穗的玉米秸秆被转动拨杆10拨入转动滚轮8后被夹持,每组三对主转动滚轮22、从转动滚轮23与扶持轮24在弹性自适应装置9的作用下将玉米秸秆夹紧,从转动滚轮23与形变传感器21相连,主转动滚轮22转动带动玉米秸秆向上移动,在从转动滚轮23滚过玉米秸秆硬节后形变传感器21识别到玉米秸秆硬节,切刀19弹出将玉米秸秆硬节切除,扶持轮24在切刀19切除硬节时给玉米秸秆支撑,在切刀19切除硬节之后,去除硬节的玉米秸秆在主转动滚轮22的带动下向上运动,在进入下一个去茎节与剖穰机构时,从转动滚轮23形变传感器被触发,控制剖刮一体刀具7弹出,被去除茎节的玉米秸秆由下往上运动,剖刮一体刀具7切入已去节的玉米秸秆中,剖切刃口16在玉米秸秆横截面中间入刀,犁形刃口17沿着玉米秸秆皮穰相接处切入并将玉米秸秆皮穰分离,弹性自适应杆18联接着剖刮一体刀具7,可以使剖刮一体刀具7始终可以切入不同直径的玉米秸秆中间,分离后的玉米秸秆叶、果实、硬节、穰以及秸秆皮在每一步骤结束后分别收储, 机器人遥控器与机器人控制器通过无线模块通讯,遥控器控制机器人工作,视频监控系统实时监控机器人工作环境。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1