一种机器人抓手的制作方法
1.本申请涉及机械加工领域,尤其涉及一种机器人抓手。
背景技术:
2.相关技术中,采用铁钳夹取棒料,由于铁钳两摆臂的同步性较难控制,导致棒料被夹住时的位置相对于其初始位置会发生偏移。
技术实现要素:
3.本申请旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本申请的目的在于提出一种机器人抓手,能够保证棒料被夹住时位置的相对稳定。
5.为实现上述目的,本申请提出了一种机器人抓手,包括底座,所述底座上配置有可沿所述底座的纵向做往复运动的活动板,所述活动板两侧的所述底座上配置有可沿所述底座的横向做往复运动的滑板,所述活动板与所述滑板通过连接板铰接,所述活动板带动两侧的所述滑板同步运动,以使两所述滑板同时接触棒料。
6.根据本申请提出的机器人抓手,通过在底座上配置沿纵向往复运动的活动板,在活动板的两侧配置沿横向往复运动的滑板,并使活动板和滑板之间通过连接板铰接,当活动板带动两滑板同步运动时,两滑板会同时接触棒料,保证了棒料被夹住时位置不发生偏移。
7.另外,根据本申请提出的机器人抓手还可以具有如下附加技术特征:
8.进一步地,所述活动板与固接在所述底座上的伸缩杆传动连接。
9.进一步地,所述伸缩杆为液压伸缩杆。
10.进一步地,所述活动板的底部设置支撑板。
11.进一步地,所述底座上构造有用于和所述滑板滑动卡接的滑轨。
12.进一步地,所述滑轨平行设置两个。
13.进一步地,所述滑板在所述活动板的两侧对称布置。
14.进一步地,所述连接板在所述活动板的两侧对称布置。
15.进一步地,所述滑板上固接支撑臂,所述支撑臂的外端设置夹板。
16.进一步地,所述夹板在所述活动板的两侧对称布置。
附图说明
17.本申请上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
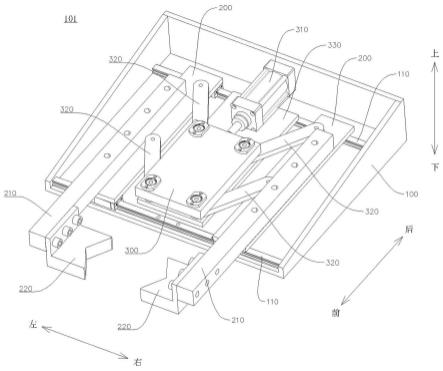
18.图1为根据本申请实施例的机器人抓手的示意图;
19.附图标记:
20.101、机器人抓手;
21.100、底座;
22.110、滑轨;
23.200、滑板;
24.210、支撑臂;
25.220、夹板;
26.300、活动板;
27.310、气缸;
28.320、连接板;
29.330、支撑板。
具体实施方式
30.下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
31.下面参考附图描述本申请实施例的机器人抓手。
32.如图1所示,根据本申请实施例的机器人抓手101包括底座100、滑板200和活动板300。
33.其中,底座100被构造成矩形板状,所述底座100的左右两侧以及后侧向上延伸形成侧壁。
34.在本实施例中,气缸310的固定端连接在底座100的后侧壁的内侧,液压杆310的活动端与活动板300固定连接,活动板300在气缸310的带动下沿底座100的前后方向做往复运动。
35.可以理解的是,为了保证活动板300运动的平稳性,在活动板300下方的底座100上固定连接有支撑板330,活动板300可滑动的放置在支撑板330的上方,以保证活动板300处于水平状态。
36.另外,在底座100上还固定连接有两个相互平行的滑轨110,滑轨110沿底座100的左右方向(即横向)延伸。
37.滑板200的两端可滑动地卡接在滑轨110上,且滑板200与滑轨110保持垂直。
38.作为一例,两个滑板200在活动板300的左右两侧对称布置。
39.活动板300的左右两个各设置有两个连接板320,连接板320的两端分别与活动板300和滑板200铰接。
40.作为一例,位于活动板300同一侧的两个连接板320保持平行设置,且活动板300两侧的连接板320保持对称设置。
41.可以理解的是,气缸310的伸缩可以带动活动板300沿底座100的前后方向(即纵向)做往复运动,通过连接板320的铰接作用,进而可以带动两侧的滑板200沿滑轨110做往复运动。
42.还可以理解的是,由于连接板320对称布置在活动板300的左右两侧,同时,滑板200也对称布置在活动板300的左右两侧,因此,活动板300的移动可以带动两侧的滑板200做同步移动。
43.需要说明的是,连接板320铰接在活动板300的底面,为了保证活动板300移动的平稳性,应使连接板320贴靠在支撑板330的表面。
44.在本实施例中,沿滑板200的纵长方向在滑板200上固接有支撑臂210,支撑臂210的外端伸出至底座100的外部,且在支撑臂210的外端部的固接有夹板220。
45.需要说明的是,支撑臂210在活动板300的左右两侧保持对称布置,同时,夹板220在活动板300的左右两侧也保持对称布置。
46.可以理解的是,夹板220在支撑臂210的带动下会随滑板200同步运动,将棒料放置在活动板300的中间位置处,通过活动板300的运动可以带动两侧的夹板220同步向内侧运动,并同时与棒料接触,以夹紧棒料,使棒料被夹住时其位置不发生偏移,保证了夹取的精准度。
47.尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替代和变型。
技术特征:
1.一种机器人抓手,其特征在于,包括底座,所述底座上配置有可沿所述底座的纵向做往复运动的活动板,所述活动板两侧的所述底座上配置有可沿所述底座的横向做往复运动的滑板,所述活动板与所述滑板通过连接板铰接,所述活动板带动两侧的所述滑板同步运动,以使两所述滑板同时接触棒料。2.如权利要求1所述的机器人抓手,其特征在于,所述活动板与固接在所述底座上的伸缩杆传动连接。3.如权利要求2所述的机器人抓手,其特征在于,所述伸缩杆为液压伸缩杆。4.如权利要求1所述的机器人抓手,其特征在于,所述活动板的底部设置支撑板。5.如权利要求1所述的机器人抓手,其特征在于,所述底座上构造有用于和所述滑板滑动卡接的滑轨。6.如权利要求5所述的机器人抓手,其特征在于,所述滑轨平行设置两个。7.如权利要求6所述的机器人抓手,其特征在于,所述滑板在所述活动板的两侧对称布置。8.如权利要求7所述的机器人抓手,其特征在于,所述连接板在所述活动板的两侧对称布置。9.如权利要求8所述的机器人抓手,其特征在于,所述滑板上固接支撑臂,所述支撑臂的外端设置夹板。10.如权利要求9所述的机器人抓手,其特征在于,所述夹板在所述活动板的两侧对称布置。
技术总结
本申请提出了一种机器人抓手,包括底座,所述底座上配置有可沿所述底座的纵向做往复运动的活动板,所述活动板两侧的所述底座上配置有可沿所述底座的横向做往复运动的滑板,所述活动板与所述滑板通过连接板铰接,所述活动板带动两侧的所述滑板同步运动,以使两所述滑板同时接触棒料。能够保证棒料被夹住时位置的相对稳定。相对稳定。相对稳定。
技术研发人员:刘光辉 孙红星 刘丹 刘百宣 刘华 王涛 张义帅 张超 张京学 云淑娟
受保护的技术使用者:郑州机械研究所有限公司
技术研发日:2022.02.22
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1