一种铅酸蓄电池端子焊接用夹取机构的制作方法
一种铅酸蓄电池端子焊接用夹取机构
【技术领域】
1.本实用新型涉及铅蓄电池焊接的技术领域,特别是一种铅酸蓄电池端子焊接用夹取机构。
背景技术:
2.铅酸蓄电池的焊接,特别是电动车用铅酸蓄电池的汇流排及接线柱(端子)的焊接,是指将电池极群中的正极片与相邻电池单格的负极片熔化后串联一起实现汇流排焊接成一体的过程。最早采用手工焊接,选用气体高温燃烧后将极片的极耳熔化,并加入焊料,然后冷却成型,实现汇流排的焊接。随着自动化水平的提高,目前市场上一般采用铸焊方法,配合自动或半自动焊接机,实现电池汇流排及接线柱的焊接。铸焊方法是将合金铅在铅锅中加热熔化成液态,液态铅加入焊接模腔,再将电池倒放,极耳朝下插入铅液型腔,使极片熔化成一体,实现汇流排接线柱的焊接。
3.上述的手工气焊存在一定的缺陷:劳动强度大,焊接环境差,不利于操作工的身体健康。焊接质量一致性差,电池质量可控性差。自动或半自动铸焊同样存劳动强度大的缺点,同时因一直保温加温铅液,能耗较大,焊接成本较高。焊接环境无法相对隔离,铅烟尘污染大,影响操作工身体健康。
技术实现要素:
4.本实用新型的目的就是解决现有技术中的问题,提出一种铅酸蓄电池端子焊接用夹取机构,能够自动送端子,便于实现自动焊接。
5.为实现上述目的,本实用新型提出了一种铅酸蓄电池端子焊接用夹取机构,包括端子进料座、双工位上料机构、推料机构、机械手行走座和机械手夹取机构,所述端子进料座上设有进料导槽,所述进料导槽靠近出口的一端设有可移动的双工位上料机构,所述双工位上料机构上设有第一端子位、第二端子位,所述推料机构上设有可沿进料导槽长度方向移动的推料架,所述推料架用于将进料导槽内的端子推送至第一端子位、第二端子位上,所述机械手行走座的下方设置有可沿其长度方向移动的机械手夹取机构,所述机械手夹取机构位于双工位上料机构的上方,所述机械手夹取机构的下方设有两个可升降的端子抓取机械手,用于抓取第一端子位、第二端子位上的端子,并输送至焊接工位。
6.作为优选,所述双工位上料机构包括端子移位座、端子移位气缸和安装座,所述安装座上设有第一导轨,所述端子移位座通过移位滑座活动安装于第一导轨上,所述端子移位座上沿其长度方向设置依次设置有第一端子位、第二端子位,所述第一导轨与端子移位座的长度方向相平行,所述端子移位气缸安装于安装座一端的支架上,所述端子移位气缸的伸缩杆与移位滑座相连,用以驱动端子移位座沿第一导轨移动。
7.作为优选,所述推料机构还包括推料气缸,所述推料气缸的伸缩杆与推料架相连,用以驱动推料架移动,所述推料架的底部沿水平方向延伸有推板。
8.作为优选,所述机械手行走座的下方对称设有第二导轨,所述机械手夹取机构活
动安装于第二导轨上,所述机械手行走座的一端安装有平移气缸,所述平移气缸的伸缩杆与机械手夹取机构相连,用以驱动其沿第二导轨移动。
9.作为优选,所述机械手夹取机构还包括行走滑座、升降气缸、升降架,所述行走滑座安装于第二导轨上,所述平移气缸的伸缩杆与行走滑座相连,所述行走滑座的下方安装有升降气缸,所述升降气缸的伸缩杆与升降架相连接,所述升降架的底部对称安装有两个端子抓取机械手。
10.作为优选,所述端子抓取机械手包括端子夹取手指、以及驱动端子夹取手指松开或夹紧的夹取气缸,所述两个端子抓取机械手分别与第一端子位、第二端子位相对应。
11.作为优选,所述进料导槽的进口处的一侧设有导入斜槽。
12.本实用新型的有益效果:本实用新型通过端子进料座、双工位上料机构、推料机构、机械手行走座和机械手夹取机构等的配合,采用具有双工位的双工位上料机构,能够对接单出口的振动盘,将端子转换为双位置。并且采用端子抓取机械手对两个端子同时上料,能够提高焊接效率。此外,焊接时端子仍能够处于夹持状态,保证焊接过程端子的位置不会变动,有利于提高焊接精度,该装置适用于氩弧焊接蓄电池汇流排端子的焊接。
13.本实用新型的特征及优点将通过实施例结合附图进行详细说明。
【附图说明】
14.图1是本实用新型一种铅酸蓄电池端子焊接用夹取机构的结构示意图;
15.图2是本实用新型一种铅酸蓄电池端子焊接用夹取机构的内部结构示意图;
16.图3是本实用新型一种铅酸蓄电池端子焊接用夹取机构的主视示意图;
17.图4是本实用新型一种铅酸蓄电池端子焊接用夹取机构的右视示意图。
【具体实施方式】
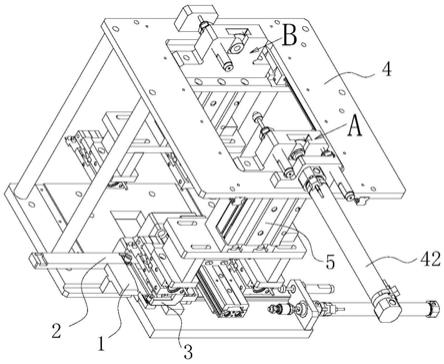
18.参阅图1至图4本实用新型一种铅酸蓄电池端子焊接用夹取机构,包括端子进料座1、双工位上料机构2、推料机构3、机械手行走座4和机械手夹取机构5,所述端子进料座1上设有进料导槽11,所述进料导槽11靠近出口的一端设有可移动的双工位上料机构2,所述双工位上料机构2上设有第一端子位211、第二端子位212,所述推料机构3上设有可沿进料导槽11长度方向移动的推料架32,所述推料架32用于将进料导槽11内的端子推送至第一端子位211、第二端子位212上,所述机械手行走座4的下方设置有可沿其长度方向移动的机械手夹取机构5,所述机械手夹取机构5位于双工位上料机构2的上方,所述机械手夹取机构5的下方设有两个可升降的端子抓取机械手54,用于抓取第一端子位211、第二端子位212上的端子,并输送至焊接工位。
19.为了实现双工位上料,多采用双出口振动盘上料,但双出口振动盘结构复杂,要求高。在本实施例中,为了对接单出口的振动盘,增设端子移位部分,通过双工位上料机构2能够将单出口上料的端子转换成双位置。具体的,所述双工位上料机构2包括端子移位座21、端子移位气缸22和安装座23,所述安装座23上设有第一导轨231,所述端子移位座21通过移位滑座210活动安装于第一导轨231上,所述端子移位座21上沿其长度方向设置依次设置有第一端子位211、第二端子位212,所述第一导轨231与端子移位座21的长度方向相平行,所述端子移位气缸22安装于安装座23一端的支架232上,所述端子移位气缸22的伸缩杆与移
位滑座210相连,用以驱动端子移位座21沿第一导轨231移动。
20.进一步地,所述推料机构3还包括推料气缸31,所述推料气缸31的伸缩杆与推料架32相连,用以驱动推料架32移动,所述推料架32的底部沿水平方向延伸有推板321。
21.进一步地,所述机械手行走座4的下方对称设有第二导轨41,所述机械手夹取机构5活动安装于第二导轨41上,所述机械手行走座4的一端安装有平移气缸42,所述平移气缸42的伸缩杆与机械手夹取机构5相连,用以驱动其沿第二导轨41移动。
22.进一步地,所述机械手夹取机构5还包括行走滑座51、升降气缸52、升降架53,所述行走滑座51安装于第二导轨41上,所述平移气缸42的伸缩杆与行走滑座51相连,所述行走滑座51的下方安装有升降气缸52,所述升降气缸52的伸缩杆与升降架53相连接,所述升降架53的底部对称安装有两个端子抓取机械手54。
23.进一步地,所述端子抓取机械手54包括端子夹取手指、以及驱动端子夹取手指松开或夹紧的夹取气缸,所述两个端子抓取机械手54分别与第一端子位211、第二端子位212相对应。
24.进一步地,所述进料导槽11的进口处的一侧设有导入斜槽12,便于端子进入。
25.本实用新型工作过程:
26.本实用新型一种铅酸蓄电池端子焊接用夹取机构,在使用的过程中,
27.参与图1、图2,端子通过单出口的振动盘由进料导槽11的端子左侧的入口送入,在推料气缸31作用下,推板32能够将端子推送到端子移位座21的第一端子位211后返回,等待下一个端子送到进料导槽11的端子入口;然后在端子移位气缸22作用下,端子移位座21向右移动,使第二端子位212平移到第一端子位211所在的位置,在推料气缸31作用下,推板32将端子推到第二端子位212后返回,等待下周期的动作,至此完成一次端子移位座21的上料动作。
28.机械手夹取机构5此时处于图1所示的a处,并且两个端子抓取机械手54处于第一端子位211、第二端子位212的上方,此时端子夹取手指为张开状态,在升降气缸52作用下,端子夹取手指下移,张开手指套住端子圆柱,端子夹取气缸动作,夹紧端子。
29.升降气缸52上升,带动端子上升到位。平移气缸42动作,控制机械手夹取机构5移动至图1所示的b处,即将端子平移到焊接位上方,然后升降气缸52控制端子抓取机械手54下降,端子被送到焊接位,此时,端子夹取手指不动,保持端子焊接过程不动,不移位,待焊接完成后再松开。最后,升降气缸52上升,带动张开手指的端子抓取机械手54上升,平移气缸42再次动作,控制机械手夹取机构5复位至图1所示的a处,此时张开的手指两个端子抓取机械手54处于第一端子位211、第二端子位212的上方,等待下周期的动作。
30.上述实施例是对本实用新型的说明,不是对本实用新型的限定,任何对本实用新型简单变换后的方案均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1