给汽车电子水泵装配转子的方法和装置与流程
1.本发明涉及汽车配件电子水泵生产技术领域,尤其是指一种给汽车电子水泵装配转子的方法和装置。
背景技术:
2.在汽车发动机的缸体里,有多条供冷却水循环的水道,与置于汽车前部的散热器(俗称水箱)通过水管相连接,构成一个大的水循环系统,在发动机的上出水口,装有一个水泵,通过风扇皮带来带动,把发动机缸体水道内的热水泵出,把冷水泵入。
3.汽车电子水泵中包括电机组件、转子、控制器、密封圈、后盖等,在电子水泵组装过程中,需要将转子安装于电机的中心轴上,其中,装配要求为转子(含石墨磁环结构)压装时不允许有刮擦、磕碰,并且如图1所示,转子与电机轴安装后间隙配合公差在0.025mm-0.075mm的范围内。
4.现有的装配方式有以下两种:1、全程采用人工进行组装。
5.2、采用如中国实用新型专利(cn215358301u)公开的一种汽车水泵电机组装装置,通过输送线托盘工装对电机进行定位,并通过伺服机构驱动气缸抓手组件下压行,将转子装配于电机轴上。
6.但上述装配方式目前缺陷:依靠操作人员手工组装或依靠伺服驱动组装电机和转子,搬运电机或转子时会产生刮擦、磕碰,电机和转子之间会存在定位误差,最终导致在装配时候,不能安全可靠装配到位,会出现装配错位等现象。
技术实现要素:
7.针对现有技术的不足,本发明公开了一种给汽车电子水泵装配转子的方法和装置。
8.本发明所采用的技术方案如下:一种给汽车电子水泵装配转子的方法,包括以下步骤:步骤s1:机械抓手抓取带磁性的转子,所述机械抓手的压紧气缸伸出抵紧所述转子,所述机械抓手将所述转子输送至电机所在位置的上方;步骤s2:所述机械抓手将所述转子下移并靠近所述电机,所述机械抓手通过在垂直平面内浮动进行一次找正;同时,所述机械抓手通过径向振动,带动所述机械抓手进行二次找正;步骤s3:所述机械抓手找正后下移直至所述机械抓手的多指气爪的夹指靠近所述电机后,所述振动器停止工作;所述机械抓手的压紧气缸缩回,所述机械抓手的多指气爪打开,所述转子自动吸合到所述电机内。
9.其进一步的技术特征在于:在步骤s1中,所述机械抓手抓取所述转子后,通过平衡气缸和位移传感器平衡所述机械抓手的重量。
10.其进一步的技术特征在于:在步骤s1中,所述电机设置在电机定位块内进行限位。
11.其进一步的技术特征在于:在步骤s2中,所述机械抓手通过平面浮动补偿器进行通气动作,带动所述机械抓手在垂直平面内进行浮动;并且,所述平面浮动补偿器的补偿累计误差为
±
0.5mm。
12.其进一步的技术特征在于:在步骤s2中,所述机械抓手通过振动器进行径向振动。
13.其进一步的技术特征在于:在步骤s2中,所述电机通过所述机械抓手的浮动压杆抵紧并限制移动。
14.一种给汽车电子水泵装配转子的装置,用于实施上述所述的给汽车电子水泵装配转子的方法,包括:多指气动夹爪,用于抓紧转子;找正模块,连接所述多指气动夹爪,用于机械抓手在垂直平面内浮动的一次找正和机械抓手径向振动的二次找正;平衡气缸,安装于所述多指气动夹爪之上,且所述平衡气缸设有位移传感器;压紧气缸,设置于所述多指气动夹爪的中心处,用于伸出抵紧转子或缩回远离转子。
15.其进一步的技术特征在于:所述找正模块包括平面浮动补偿器、平面浮动补偿器连接板和振动器,所述多指气动夹爪连接所述平面浮动补偿器连接板,所述平面浮动补偿器连接板之上安装所述平面浮动补偿器,并且,所述振动器设置在所述平面浮动补偿器连接板上;所述平面浮动补偿器的中心和所述多指气动夹爪的重心重合。
16.其进一步的技术特征在于:还包括浮动压杆,和所述多指气动夹爪固定连接,用于抵紧转子。
17.其进一步的技术特征在于:还包括电机定位块,设置在所述多指气动夹爪的下方,用于定位电机。
18.本发明的上述技术方案相比现有技术具有以下优点:本发明针对现有的零件定位误差、搬运误差等,造成装配不良现象,提出了两次找正及振动装配的方案,具体地,给汽车电子水泵装配转子的装置上增设振动器和平面浮动补偿器,解决定位的累计误差;并且,给汽车电子水泵装配转子的装置上增设平衡气缸和位移传感器,解决由于抓手重量导致装配时刮擦、磕碰等问题。
19.本发明可以保证产品一致性及稳定性更好,电机转子组装产线可以实现大批量生产。
20.本发明的装配方法中的各个步骤的操作时间在可控的节拍内,并且本发明可以减少作业人员数量,提高空间利用率。
附图说明
21.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
22.图1是转子与电机轴安装后间隙配合公差的示意图。
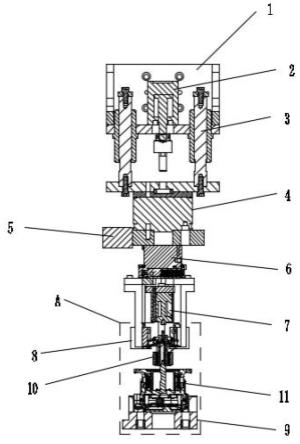
23.图2是本发明中给汽车电子水泵装配转子的方法的第一状态的示意图。
24.图3是本发明中给汽车电子水泵装配转子的方法的第二状态的示意图。
25.图4是图3中a处的放大示意图。
26.图5是本发明中给汽车电子水泵装配转子的方法的第三状态的示意图。
27.图6是图5中b处的放大示意图。
28.图7是本发明中给汽车电子水泵装配转子的方法的第四状态的示意图。
29.图8是图7中c处的放大示意图。
30.说明书附图标记说明:1、抓手安装板;2、平衡气缸;3、导向柱;4、平面浮动补偿器;5、振动器;6、多指气动夹爪;7、压紧气缸;8、浮动压杆;9、电机定位块;10、转子;11、电机。
具体实施方式
31.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
32.关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明,此外,在全部实施例中,相同的附图标号表示相同的元件。
33.实施例1:一种给汽车电子水泵装配转子的方法,包括以下步骤:如图2所示,步骤s1:机械抓手抓取带磁性的转子,机械抓手的压紧气缸伸出抵紧转子,机械抓手将转子输送至电机所在位置的上方;结合图3-图6,步骤s2:机械抓手将转子下移并靠近电机,机械抓手通过在垂直平面内浮动进行一次找正;同时,机械抓手通过径向振动,带动机械抓手进行二次找正;结合图7和图8,步骤s3:机械抓手找正后下移直至机械抓手的多指气爪的夹指靠近电机后,振动器停止工作;机械抓手的压紧气缸缩回,机械抓手的多指气爪打开,转子自动吸合到电机内。
34.上述提供了一种给汽车电子水泵装配转子的方法,克服现有技术的难点如下:(1)转子和电机之间自身的装配精度高;(2)转子和电机之间配合部分材料特殊,不允许磕碰及划伤;(3)转子或电机的定位部分误差相对较大;(4)人工搬运误差较大。
35.在本实施例中,在步骤s1中,机械抓手抓取转子后,通过平衡气缸和位移传感器平衡机械抓手的重量。
36.在本实施例中,在步骤s1中,电机设置在电机定位块内进行限位。
37.在本实施例中,在步骤s2中,机械抓手通过平面浮动补偿器进行通气动作,带动机械抓手在垂直平面内进行浮动;并且,平面浮动补偿器的补偿累计误差为
±
0.5mm。
38.在本实施例中,在步骤s2中,机械抓手通过振动器进行径向振动。
39.在本实施例中,在步骤s2中,电机通过机械抓手的浮动压杆抵紧并限制移动。
40.实施例2:一种给汽车电子水泵装配转子的装置,用于实施实施例1提供的给汽车电子水泵装配转子的方法,包括:多指气动夹爪6,用于抓紧转子10;找正模块,连接多指气动夹爪6,用于机械抓手在垂直平面内浮动的一次找正和机
械抓手径向振动的二次找正;平衡气缸2,安装于多指气动夹爪6之上,且平衡气缸2设有位移传感器;平衡气缸2用于平衡多指气动夹爪6的重量,防止多指气动夹爪6的自重过大导致转子10磕碰损伤;当转子10与电机11装配位置偏差过大时,多指气动夹爪6会上浮,位移传感器报警,避免转子10与电机11错位装配,导致转子10损坏。
41.压紧气缸7,设置于多指气动夹爪6的中心处,用于伸出抵紧转子10或缩回远离转子10。压紧气缸7有效防止转子10发生打滑及和电机11装配时被顶出。
42.上述提供了一种给汽车电子水泵装配转子的装置,可稳定、可靠地装配到位,不会损伤装配零件,有效提高自动化程度。
43.在本实施例中,多指气动夹爪6为三指气动夹爪。具体地,三指气动夹爪的相邻两个夹指之间形成120
°
的夹角。并且,考虑到夹持位置、转子外圆大小的偏差的因素影响,三指气动夹爪的每个夹指设计v型口,保证两点接触转子,同时三指气动夹爪的夹指的材料需要选择非导磁材料。
44.在本实施例中,平衡气缸2的缸径选择需要匹配多指气动夹爪6和转子10的总重量,平衡气缸2增加精密调压阀,调节精密减压阀可以较准确的平衡多指气动夹爪6的重量。
45.在本实施例中,位移传感器的行程为10mm,行程若有变化,可直接反馈给可编程的存储器,在可编程的存储器的内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,通过数字式或模拟式的输入输出来控制平衡气缸2的状态。
46.在本实施例中,找正模块包括平面浮动补偿器4、平面浮动补偿器连接板和振动器5,多指气动夹爪6连接平面浮动补偿器连接板,平面浮动补偿器连接板之上安装平面浮动补偿器4,并且,振动器5设置在平面浮动补偿器连接板上;平面浮动补偿器4的中心和多指气动夹爪6的重心重合。平面浮动补偿器4用于补偿装配累计误差;振动器5在装配时进行振动,振动频次可通过节流阀调节,增加装配可靠性。
47.在本实施例中,给汽车电子水泵装配转子的装置还包括浮动压杆8,和多指气动夹爪6固定连接,用于抵紧转子10。具体地,在多指气动夹爪6的固定部设置一固定板,固定板沿多指气动夹爪6的径向延伸一定的长度,其长度要求根据转子10装配后的高度设计,浮动压杆8垂直穿过固定板并安装于该固定板上。
48.在本实施例中,给汽车电子水泵装配转子的装置还包括导向柱3和导向安装板,导向安装板的一侧面用于固定平面浮动补偿器4,导向安装板的另一侧面用于安装导向柱3,导向柱3起到平衡气缸2的浮导向作用。
49.在本实施例中,给汽车电子水泵装配转子的装置还包括电机定位块9,设置在多指气动夹爪6的下方,用于定位电机。具体地,电机定位块9开设凹槽,凹槽的形状和电机11的外壳的形状契合,能够较好地固定电机11,避免电机11产生位移。
50.在本实施例中,给汽车电子水泵装配转子的装置还包括抓手安装板1,可将给汽车电子水泵装配转子的装置安装于机器人或伺服模组上。并且,导向柱3穿过抓手安装板1。
51.在本发明实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术
语在本发明中的具体含义。
52.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1