一种线上硅棒打码测距系统的制作方法
1.本实用新型属于硅棒相关设备技术领域,本实用新型涉及一种线上硅棒打码测距系统。
背景技术:
2.长毛硅棒在切断完成进入后续加工工序之前,人工需要将从切断机流出的每个硅棒的信息制作成随工单粘贴在硅棒上,在后续每个工序都需要人工扫描随工单录入硅棒信息,并且在在硅棒进入切方之前还需要对硅棒长度进行检验,缺点是人工扫随工单效率低,劳动强度大,整个生产线节拍浪费严重,且随工单易丢失。
技术实现要素:
3.本实用新型的目的是克服上述背景技术中的不足,提供一种线上硅棒打码测距系统,该系统可实现硅棒在输送线上就将信息记录在硅棒端面上,在记录硅棒信息的同时检测硅棒长度,并在打码完成后自动扫码,将信息传递给下一道工序,降低工人劳动强度,提高生产效率。
4.本实用新型解决其技术问题所采用的技术方案是:一种线上硅棒打码测距系统,包括上料输送线、打码机a、打码机b;打码机a和打码机b分别设置在上料输送线的侧面;
5.所述打码机a包括架体底座,架体底座顶部上固定设有气缸a、两组直线导轨a,两组直线导轨a分别设置在气缸a的两侧,气缸a上方设有气缸连接板a且气缸a与气缸连接板a相连接,气缸连接板a底部两侧分别通过滑块与两组直线导轨a活动连接;气缸连接板a上固定设有伺服模组a,伺服模组a上方设有伺服模组a连接板,伺服模组a与伺服模组a连接板之间通过滑动组件连接,所述伺服模组a一侧连接有伺服电机a,伺服模组a连接板上设有激光打码器a,伺服模组a连接板上设有连接支架,支架前端设有激光测距仪a,支架的支柱上通过固定件与二维码扫码头a连接,所述二维码扫码头a相邻处设有触点开关a,所述激光测距仪a处设有光源a。
6.所述打码机a与打码机b伺服模组型号不同,除伺服模组外,打码机b与打码机a其他结构相同。
7.所述上料输送线上设有到位传感器。
8.进一步的,所述上料输送线可以为锥辊线、倍速链输送线等输送方式;但不限定于锥辊线、倍速链输送线;实现其输送传递功能即可。
9.进一步的,打码机a与打码机b相邻设置。
10.进一步的,所述架体底座一侧设有电控箱;
11.进一步的,所述滑动组件为能实现伺服模组a连接板在伺服模组a上滑动移动即可,具体可以选择直线导轨和滑块。
12.进一步的,所述架体底座为立方体框架,每个竖直方向的边柱与水平方向的边柱连接后延伸至地面分别与地脚连接固定。
13.进一步的,所述光源a为光源板,光源板通过支架与伺服模组a连接板上的连接支架连接。
14.进一步的,所述架体底座采用方钢管焊接。
15.进一步的,所述架体底座上设有固定支架,用于稳定架体底座的框架。
16.所述激光打码器a、二维码扫码头a、激光测距仪a分别与mes系统连接。
17.所述到位传感器、上料输送线、气缸a、伺服模组a、触点开关a、光源a、伺服模组a连接板、伺服电机a分别与plc系统相连接。
18.进一步的,所述线上硅棒打码测距系统可作用于直径200-350mm的硅棒,长度最小200mm到1000mm的硅棒。
19.本实用新型与现有技术相比具有的有益效果是:
20.本实用新型提供的一种线上硅棒打码测距系统,弥补了人工扫码传递信息造成的效率低、耗费人力、信息易丢失等缺点,实现了硅棒信息传递的完全自动化,符合未来光伏产业乃至自动化行业的发展趋势。其中所述打码机a和打码机b均为横向气缸进给机构+纵向伺服模组进给机构,横向气缸进给机构结构简单,控制简单,维修方便,纵向丝杠进给机构由伺服电机控制,精度高,运行稳定。
附图说明
21.下面结合附图和实施例对本实用新型进一步说明:
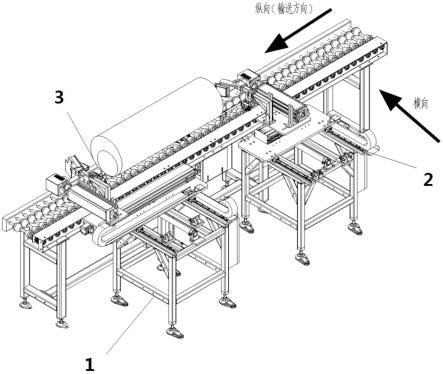
22.图1是本实用新型一种线上硅棒打码测距系统示意图。
23.图2是本实用新型一种线上硅棒打码测距系统隐藏上料输送线后的侧视图。
24.图3是本实用新型打码机a的主视图。
25.图4是本实用新型打码机a的俯视图。
26.图5是本实用新型打码机b的主视图。
27.图6是本实用新型打码机b的俯视图。
28.图7是本实用新型打码机a的立体图。
29.图8是本实用新型打码机b的立体图。
30.图中1.打码机a,2.打码机b,3.上料输送线,101.气缸a,102.伺服模组a,103.激光打码器a,104.二维码扫码头a,105.激光测距仪a,106.气缸连接板a,107.触点开关a,108.光源a,109.伺服模组a连接板,110.伺服电机a,111.直线导轨a,112.架体底座,201.气缸b,202.伺服模组b,203.激光打码器b,204.二维码扫码头b,205.激光测距仪b,206.气缸连接板b,207.触点开关b,208.光源b,209.伺服模组b连接板,210.伺服电机b,211.直线导轨b。
具体实施方式
31.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。下述实施例中与mes系统相连接的所述激光打码器a、二维码扫码头a、激光测距仪a、激光打码器b、二维码扫码头b、激光测距仪b均不限定某一具体型号,实现其功能即可。实施例中与plc系统相连接的到位传感器、上料输送线、气缸a、伺服模组a、触点开关a、光源a、伺服模组a连接板、伺服电机a、气缸b、伺服模组b、触点开关b、光源b、伺服模组b连接板、伺服电机b均不限定某一具体型号,实现其功能即可。
32.实施例1
33.一种线上硅棒打码测距系统,如图1-图8所示,包括上料输送线3、打码机a 1、打码机b 2;打码机a 1和打码机b 2分别设置在上料输送线3的侧面;
34.所述打码机a 1包括架体底座112,架体底座112顶部上固定设有气缸a 101、两组直线导轨a 111,两组直线导轨a 111分别设置在气缸a 101的两侧,气缸a 101上方设有气缸连接板a 106且气缸a 101与气缸连接板a 106相连接,气缸连接板a 106底部两侧分别通过滑块与两组直线导轨a 111活动连接;气缸连接板a 106上固定设有伺服模组a 102,伺服模组a 102上方设有伺服模组a连接板109,伺服模组a 102与伺服模组a连接板109之间通过滑动组件连接,所述伺服模组a 102一侧连接有伺服电机a 110,伺服模组a连接板109上设有激光打码器a 103,伺服模组a连接板109上设有连接支架,支架前端设有激光测距仪a 105,支架的支柱上通过固定件与二维码扫码头a 104连接,所述二维码扫码头a 104相邻处设有触点开关a 107,所述激光测距仪a 105处设有光源a 108。
35.所述打码机a 1与打码机b 2上伺服模组型号不同,其他结构相同。具体为:所述打码机b 2包括架体底座112,架体底座112顶部上固定设有气缸b 201、两组直线导轨b 211,两组直线导轨b 211分别设置在气缸b 201的两侧,气缸b 201上方设有气缸连接板b 206且气缸b 201与气缸连接板b 206相连接,气缸连接板b 206底部两侧分别通过滑块与两组直线导轨b 211活动连接;气缸连接板b 206上固定设有伺服模组b 202,伺服模组b 202上方设有伺服模组b连接板209,伺服模组b 202与伺服模组b连接板209之间通过滑动组件连接,所述伺服模组b 202一侧连接有伺服电机b 210,伺服模组b连接板209上设有激光打码器b 203,伺服模组b连接板209上设有连接支架,支架前端设有激光测距仪b 205,支架的支柱上通过固定件与二维码扫码头b 204连接,所述二维码扫码头b 204相邻处设有触点开关b 207,所述激光测距仪b 205处设有光源b 208。
36.所述上料输送线3上设有到位传感器。
37.进一步的,所述上料输送线3可以为锥辊线、倍速链输送线等输送方式;但不限定于锥辊线、倍速链输送线;实现其输送传递功能即可。
38.进一步的,打码机a 1与打码机b 2相邻设置。打码机a 1的伺服模组型号为tcd135-p10-s750-z-b-g2;打码机b 2的伺服模组型号为tcd135-p10-s100-z-b-g2。
39.进一步的,所述架体底座112一侧设有电控箱;
40.进一步的,所述滑动组件为能实现伺服模组a连接板109在伺服模组a 102上滑动移动、能实现伺服模组b连接板209在伺服模组b 202上滑动移动即可,具体可以为直线导轨和滑块
41.进一步的,所述架体底座112为立方体框架,每个竖直方向的边柱与水平方向的边柱连接后延伸至地面分别与地脚连接固定。
42.进一步的,所述光源a 108为光源板,光源板通过支架与伺服模组a连接板109上的连接支架连接。所述光源b 208为光源板,光源板通过支架与伺服模组b连接板209上的连接支架连接。
43.进一步的,所述架体底座112采用方钢管焊接。
44.进一步的,所述架体底座112上设有固定支架,用于稳定架体底座112的框架。
45.所述激光打码器a 103、二维码扫码头a 104、激光测距仪a 105分别与mes系统连
接。所述激光打码器b 203、二维码扫码头b 204、激光测距仪b 205分别与mes系统连接。
46.所述到位传感器、上料输送线3、气缸a 101、伺服模组a 102、触点开关a 107、光源a 108、伺服模组a连接板109、伺服电机a 110分别与plc系统相连接。
47.所述气缸b 201、伺服模组b 202、触点开关b 207、光源b 208、伺服模组b连接板209、伺服电机b 210分别与plc系统相连接。
48.该系统的工作流程具体为:先是切断后的硅棒沿上料输送线3输送,通过上料输送线3上的到位传感器检测硅棒到位至打码工位,上料输送线3停止并发送信号给plc系统,通过plc系统让打码机a 1和打码机b 2,打码机a 1和打码机b 2的横向进给气缸动作,带动整个伺服模组、激光测距仪、二维码扫码头、激光打码器前伸,气缸到位后发送信号给plc系统,plc系统给伺服模组信号,由于每根硅棒长度不相同,伺服模组带动激光测距仪、二维码扫码头、激光打码器纵向移动,触点开关接触硅棒断面,纵向移动到位,系统将硅棒信息输送给激光打码器在硅棒断面打印二维码及晶编信息,在激光打码的同时激光测距仪检测硅棒长度是否合格,打码完成后二维码扫码头读取二维码信息传递给下一个工序,完成整个动作。依次循环。
49.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1