一种智能牵引调速的高压电动机场牵引车的制作方法
1.本发明涉及机场用电动牵引车,尤其涉及一种智能牵引调速的高压电动机场牵引车。
背景技术:
2.目前机场运送行李的牵引车主要有两大类,一类是内燃牵引车,一类是电动牵引车。由于环保要求的不断提高,内燃牵引车已逐渐退出市场,电动牵引车目前在广泛运用。
3.市场上电动牵引车的工作电压一般在24-80v居多,与低压供电的电动牵引车相比,高压供电的电动牵引车在驱动的功率范围上有优势。
4.中国专利文献cn207790341u披露了一种重载电动牵引车电力控制系统,包括高压系统和低压系统,低压系统通过直流转换器连接在高压系统上,所述高压系统包括高压电池包组和高压配电控制箱,高压电池包内设有bms电池管理系统,高压配电控制箱可为驱动电机、转向电机、空调、低压电池充电机提供高压电源。
5.上述电动牵引车的vcu具有换档和调速功能,但这种车调速控制方式存在缺陷,主要是牵引力无法实时监控,在驾驶牵引车的过程中,牵引力需要受到严格限制,不允许超限,特别是牵引力超限时仍然加速行驶的情况。
6.为避免牵引力超限和牵引力超限时的超速驾驶问题,有必要提供技术手段加以控制。
技术实现要素:
7.本发明的目的在于提供一种智能牵引调速的高压电动机场牵引车,可实现对牵引力的实时检测与监控,并根据牵引力的监测数据对速度进行调节。
8.为此,本发明提供了一种智能牵引调速的高压电动机场牵引车,包括高压电源、高压配电盒、直流转换器、低压电源、转向电控、转向电机、整车控制器、行走电控、以及驱动电机,其特征在于,还包括半自动脱钩机构、牵引销、后牵引座结构件、上牵引力感应座、中牵引力感应座、下牵引力感应座,其中,所述上牵引力感应座、中牵引力感应座和下牵引力感应座各自通过传感线与整车控制器电连接,用于各自采集牵引销上中下三个位置的牵引力,所述整车控制器用于根据牵引销上中下三个位置的牵引力来计算整车牵引力,所述整车控制器还用于获知机场牵引车的行驶工况、各行驶工况下对应的牵引力限定值、并判断实测的整车牵引力是否超出该行驶工况下对应的牵引力设定值,若超出则向行走电控发送电机减速指令,以限制牵引力的提升。
9.本发明提供了工作电压在300v以上的高压牵引车,其在满足了用户对牵引功率需求的同时,提升了产品的工作效率、充电效率,实现了牵引力的实时监测和智能调速,精准匹配整机工作状态,降低无效功率耗损和故障的发生。
10.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
11.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
12.图1是根据本发明的高压电动机场牵引车的整车结构示意图;
13.图2是根据本发明的高压电动机场牵引车的内部结构示意图;
14.图3示出了根据本发明的高压电动机场牵引车的车尾结构;
15.图4是根据本发明的高压电动机场牵引车的智能牵引机构的放大示意图;
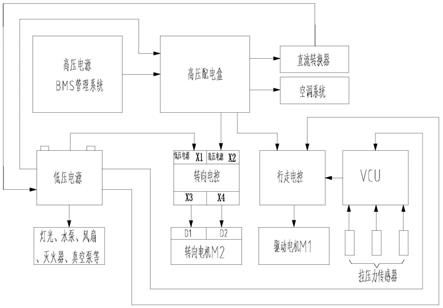
16.图5是根据本发明的高压电动机场牵引车的电力控制系统的框图;以及
17.图6是根据本发明的高压电动机场牵引车的电力控制系统的总线图。
具体实施方式
18.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
19.如图1所示,本发明的高压电动机场牵引车包括:驾驶室总成1、半自脱钩操纵杆2、驾驶操作系统3、灭火器装置4、平衡重5、驱动桥与驱动轮总成6、散热栏7、转向桥与转向轮总成8、前舱室9、板簧悬架机构10、前牵引销11、全散热栏12、航空灯13、转向灯14、前引擎盖15、后视镜16、挡风玻璃17。
20.结合参照图2和图5,本牵引车的电气控制系统的主要部件包括永磁同步驱动电机(驱动电机m1)1、直流转换器(dc-dc)2、液冷系统3、行走电控4、转向电控5、整机控制器(vcu)6、高压配电盒7、低压电源8、高压电源及bms管理系统9、以及自动灭火装置10。
21.本电气控制系统采用双电路系统设计,一是高压工作系统,工作电压为307.2v,主要功率输出部位为驱动系统、转向系统、空调系统以及直流转换器(低压蓄电池的充电系统)。二是低压工作系统,主要为高压配电盒、行走电控(驱动电机控制器)、转向电控(转向电机控制器)、vcu提供工作电源以及为灯光(整车照明和各种信号灯)、水泵、真空泵(刹车系统的真空助力泵)、散热风扇、自动灭火装置等提供电源。
22.高压工作系统为主要功率输出装置,由一组高压锂电池作为动力来源,同时可以为低压蓄电池供电,后者为照明等其他系统供电。
23.永磁同步驱动电机是主要动力输出部件,根据整机控制器(vcu)的信号指令输出扭矩。
24.高压配电盒用于对整个高压系统电源分配进行检测并通过can总线与各控制单元进行通讯,实现高压电源的供给及系统保护(见图6)。
25.优选地,在图6中,ncan和wcan是两路can通讯线,ncan是整车控制器与电机控制器之间的通讯,wcan是整车控制器与仪表,转向控制器,高压配电盒,电池之间的通讯,采用两条can通讯线避免了通讯信号在同一条线上易干扰现象,另外,采用两条can通讯,线束制作工艺较简单,可靠性提高。
26.行走电控用于控制驱动电机的运行。转向电控用于控制转向电机的运行。其中,转向电控为高低压双模式电控,相应地转向电机也为高低压双模式驱动电机。正常情况下是高压转向,当高压发生故障(高压无输出),电控将利用24v小电瓶作为电源,启动低压转向系统,确保转向系统正常运行,如此提高了整车安全性。
27.整机控制器(vcu)用于依据制定的整机策略,根据系统工况、外部工况,如不同的驱动电机在空载、满载、平路、爬坡、起步、制动等等状态下可通过参数设定进行试验匹配,以提高系统的安全性、可靠性以及驾乘的舒适性。
28.液冷系统包含水泵、储液罐、液冷风扇等,对电机、控制器主要部件进行冷却。
29.采用高压工作系统的主要目的和优点如下:
30.1、功率大。由于采用了高压供电,所以驱动的功率范围大,可轻松实现300kn以上的牵引能力,对提高机场物资的运送能力有重要意义。
31.2、效率高。采用与高压供电匹配的永磁同步驱动电机,低速大扭矩,工作效率提升明显,同样功率的电机体积更小,且可以使用水冷进行散热,运行平稳,故障率低。
32.3、充电快。采用高压充电,充电速度快,充电时间比普通的牵引车降低了70%,只需3h即可充满,降低了充电等待时间,进一步提供了用户的使用效率。
33.4、结构紧凑。由于采用高压电,同等功率下工作电流小,工作电路的线径小,易于整车线路的布局与设计,使整车结构紧凑,同时在量产后生产成本低。
34.如图4所示,本发明的高压电动机场牵引车还包括半自动脱钩机构31、传感线管32、后牵引座结构件33、上牵引力感应座34、传感线35、中牵引力感应座36、下牵引力感应座37、牵引销38。
35.本发明还设计了牵引监测与智能调速系统,主要通过牵引力感应座采集数据,并反馈在仪表上,同时经过整机控制器分析,智能制定整车策略,匹配整车的速度参数,使整机以最优的状态运行;提升运行效率,延长工作时间,降低故障率。
36.如图5所示,该牵引监测与智能调速系统包括:三个拉压力传感器、牵引力传感线、整机控制器(vcu)、行走电控、驱动电机m1。
37.牵引力测量采用三个拉压力传感器,即上牵引力感应座4、中牵引力感应座6、下牵引力感应座7。这三个拉压力传感器分别固定在后牵引座结构件3上的上、中、下三个位置,这种结构最大的优点在于可多点检测牵引钩上的牵引阻力,避免拖斗因行驶过程中惯性串动造成的测量误差。
38.上、中、下三个拉压力传感器将采集到的数据通过传感线(屏敝线缆)适时传输给整车控制器(vcu),vcu再对采集到的上、中、下三个位置的牵引力进行求和运算,得到整车的牵引力。
39.考虑车辆行驶过程中颠簸或惯性造成牵引挂钩与牵引销之间上下受力点发生改变导致传感器测量点偏移,三个传感器受力也是不一样的,挂钩越接近某个传感器,这个传感器的受力也是最大的,受力方向正是牵引力方向,其他两个受力相对较小,方向与牵引力方向有细微的偏移,可以忽略不计,故三个传感器受力之和可以看作实际牵引力。
40.根据整车的设计参数和工况要求,整机控制器(vcu)可在不同的工况条件下(如空载、满载、平路、爬坡、起步、制动等)设置相应的“牵引力限定值”,如果实测牵引力大于vcu设定值,vcu将通过can总线将信息传送给行走电控,行走电控通过降低行驶速度(即电机转速)来控制牵引力进一步上升,避免“过载”运行,有效地保护整机设备。
41.本发明在满足了用户对牵引功率的需求的同时,提升了产品的工作效率、充电效率,实现了牵引力的实时监测和智能调速,精准匹配整机工作状态,降低无效功率耗损和故障的发生。
42.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1