一种机器人三维路径智能识别记录装置
1.本实用新型涉及机器人技术领域,具体地说,涉及一种机器人三维路径智能识别记录装置。
背景技术:
2.机器学习是人工智能的核心,是使计算机具有智能的根本途径,现有的搭载人工智能技术的机器人依然是需要通过机器学习的方法实现机器人的智能化,对于需要实现智能识别道路,躲避道路上的障碍物的机器人而言,先通过大数据采集道路信息样本,是机器学习的第一步,现有的机器人在采集道路信息的时候,大多使用简单的万向轮移动,移动不便,难以适应于高低错落的复杂环境,无法准确细致的记录周边的三维路径情况,同时由于在户外记录路径情况,因此机器人需要面对不同的天气情况,防止因为天气过热或过冷,而导致芯片,摄像头模组等装置不能正常工作。
技术实现要素:
3.本实用新型的目的在于提供一种机器人三维路径智能识别记录装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供一种机器人三维路径智能识别记录装置,包括拍摄装置,安装在所述拍摄装置后侧的移动装置,安装在所述移动装置上侧的吹风装置,所述拍摄装置包括摄像球机,所述移动装置包括支撑板,所述支撑板下侧安装有履带,所述履带和所述支撑板之间安装有连接装置,所述连接装置包括连接筒,所述连接筒内置有纵向转轴,所述连接筒下侧安装有连接块,所述连接块内侧安装有横向转轴,所述连接块下侧安装有连接杆,所述连接杆下侧安装有连接套。
5.作为本技术方案的进一步改进,所述摄像球机下侧安装有第一转动轴,所述第一转动轴下侧安装有第一电机。
6.作为本技术方案的进一步改进,所述吹风装置包括风扇盒,所述风扇盒内置有扇叶,所述扇叶后侧安装有第二转动轴,所述第二转动轴后侧安装有第二电机。
7.作为本技术方案的进一步改进,所述风扇盒前侧安装有防尘板,所述防尘板表面安装有防尘网。
8.作为本技术方案的进一步改进,所述。防尘板和所述风扇盒表面开设有连接孔,所述连接孔内置有连接栓,所述连接栓和所述连接孔螺纹连接
9.作为本技术方案的进一步改进,所述风扇盒前侧安装有保护盖,所述保护盖为圆台形结构,所述保护盖和所述风扇盒之间安装有输气管。
10.作为本技术方案的进一步改进,所述风扇盒底部安装有支撑柱。
11.与现有技术相比,本实用新型的有益效果:
12.该机器人三维路径智能识别记录装置中,通过横向转轴的转动便于使得整个装置在竖直方向上上下活动,并且通过纵向转轴的转动便于整个装置在水平方向上左右转动,
使得整个装置能够在不同的地形场景顺畅地移动,提高了整个装置的对不同路面的适应性。
附图说明
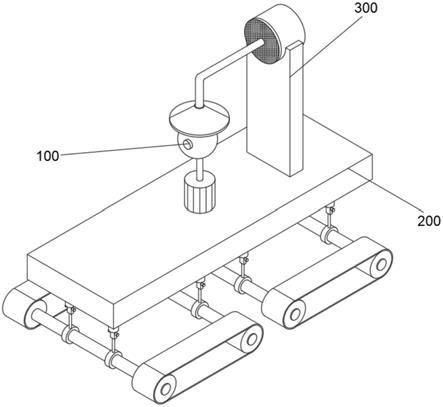
13.图1为实施例1的整体结构示意图;
14.图2为实施例1的拍摄装置结构示意图;
15.图3为实施例1的移动装置结构示意图;
16.图4为实施例1的连接装置结构拆分图;
17.图5为实施例1的吹风装置结构拆分图。
18.图中各个标号意义为:
19.100、拍摄装置;
20.110、摄像球机;111、第一转动轴;112、第一电机;
21.200、移动装置;
22.210、支撑板;
23.220、履带;
24.230、连接装置;231、连接筒;232、纵向转轴;233、连接块;234、横向转轴;235、连接杆;236、连接套;
25.300、吹风装置;
26.310、风扇盒;311、防尘板;3111、防尘网;3112、连接孔;3113、连接栓;
27.312、扇叶;313、第二转动轴;314、第二电机;
28.320、保护盖;321、输气管;
29.330、支撑柱。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.实施例1
33.请参阅图1
‑
图5所示,本实施例提供一种机器人三维路径智能识别记录装置,包括拍摄装置100,安装在拍摄装置100后侧的移动装置200,安装在移动装置200上侧的吹风装置300,拍摄装置100包括摄像球机110,摄像球机110的工作原理大致是景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,再通过usb接口传输到电脑中处理,通过显
示器就可以看到图像,移动装置200包括支撑板210,支撑板210下侧安装有履带220,履带220和支撑板210之间安装有连接装置230,连接装置230包括连接筒231,连接筒231内置有纵向转轴232,连接筒231下侧安装有连接块233,连接块233内侧安装有横向转轴234,连接块233下侧安装有连接杆235,连接杆235下侧安装有连接套236,连接套236和履带220之间的连接轴插接配合,便于支撑整个装置,通过横向转轴234便于使得整个装置在竖直方向上上下活动,并且通过纵向转轴232便于整个装置在水平方向上左右转动,使得整个装置能够适应于不同的地形场景,提高了整个装置的对不同路面的适应性。
34.本实施例中,摄像球机110下侧安装有第一转动轴111,第一转动轴111下侧安装有第一电机112,通过第一电机112带动摄像球机110的转动,便于整个装置全方位的周边环境。
35.进一步的,吹风装置300包括风扇盒310,风扇盒310内置有扇叶312,扇叶312后侧安装有第二转动轴313,第二转动轴313后侧安装有第二电机314,通过第二电机314带动扇叶312的转动,专门对于整个装置吹风,帮助了整个装置快速散热。
36.更进一步的,风扇盒310前侧安装有防尘板311,防尘板311表面安装有防尘网3111,避免灰尘进入风扇盒310中,影响扇叶312的正常旋转。
37.具体的,防尘板311和风扇盒310表面开设有连接孔3112,连接孔3112内置有连接栓3113,通过连接栓3113和连接孔3112的螺纹连接,使得风扇盒310和防尘板311便于拆装,便于工作人员清理防尘网3111。
38.值得说明的是,风扇盒310前侧安装有保护盖320,保护盖320为圆台形结构,保护盖320和风扇盒310之间安装有输气管321,保护盖320能够有效保护摄像球机110,同时扇叶312吹出的风在保护盖320的引流下,有效消除摄像球机110表面的雾气,避免影响整个装置的拍摄记录。
39.此外,风扇盒310底部安装有支撑柱330,提高了整个装置的稳定性。
40.本实施例中的机器人三维路径智能识别记录装置在具体使用时,通过横向转轴234便于使得整个装置在竖直方向上上下活动,并且通过纵向转轴232便于整个装置在水平方向上左右转动,使得整个装置能够适应于不同的地形场景,提高了整个装置的对不同路面的适应性,连接套236和履带220之间的连接轴插接配合,便于支撑整个装置,通过第一电机112带动摄像球机110的转动,便于整个装置全方位的周边环境,通过第二电机314带动扇叶312的转动,专门对于整个装置吹风,帮助了整个装置快速散热,同时扇叶312吹出的风在保护盖320的引流下,有效消除摄像球机110表面的雾气,避免影响整个装置的拍摄记录。
41.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1