止退装置及无人船布放回收设备的制作方法
1.本技术涉及无人船布放回收设备的技术领域,更具体地说,是涉及一种止退装置及无人船布放回收设备。
背景技术:
2.现有的无人船布放回收设备在用吊篮结构布放回收无人船时,吊篮结构受到海面风浪的影响容易造成倾斜,无人船有意外滑出吊篮结构的风险;
3.然而,现有的吊篮结构多数只有与船首部连接的锁止装置,无人船仍然有从吊篮结构的开口处滑出的风险。
技术实现要素:
4.本技术的目的在于提供一种止退装置及无人船布放回收设备,以解决现有技术中存在的无人船具有从吊篮结构的开口处滑出的风险的技术问题。
5.为实现上述目的,本技术采用的技术方案是一种止退装置,包括:
6.止退框架,设有第一抵止面和第二抵止面,所述第一抵止面和所述第二抵止面成倾斜角,所述止退框架在所述第一抵止面和所述第二抵止面之间设有第一转动轴;
7.止退板,与所述止退框架转动连接,所述止退板能够绕所述第一转动轴转动,所述止退板的靠近所述止退框架的表面被所述第一转动轴分隔为第一抵推面和第二抵推面,所述第一抵推面用于与所述第一抵止面抵接,所述第二抵推面与所述第二抵止面抵接;
8.手动操作装置,设有抵推端,所述抵推端用于抵推所述第一抵推面和所述第二抵推面之一,使所述止退板在止退状态和释放状态之间切换。
9.通过采用上述技术方案:
10.止退框架用于安装在起吊结构的靠近开口的部分,操作人员操作抵推端使得抵推端择一地抵于止退板的第一抵推面和第二抵推面上,使得止退板能够切换释放状态,进而使得无人船从开口进入起吊结构中,然后止退板切换止退状态,将止退板突出于无人船的移动路径上,降低无人船从起吊结构中脱落的风险。
11.在一个实施例中,所述手动操作装置包括操作杆,所述操作杆靠近所述止退板的一端形成有所述抵推端,所述操作杆的远离所述止退板的一端形成有操作端,所述操作杆与所述止退框架弹性连接,且所述抵推端能够择一地抵推在所述第一抵推面或者所述第二抵推面上。
12.通过采用上述技术方案,操作杆与止退框架弹性连接,利用弹力将止退板维持在止退状态或者释放状态,保证再不受外力的作用的情况下,止退板可以保持止退状态或者释放状态,提高止推板的稳定性。
13.在一个实施例中,所述手动操作装置还包括转动杆,所述转动杆的一端与所述止退框架的一侧转动连接,所述转动杆的另一端与所述止退框架的另一侧弹性连接,所述转动杆上设有与所述第一转动轴平行的第二转动轴,所述操作杆与所述转动杆转动连接且能
够绕第二转动轴转动,使所述抵推端能够择一地抵推在所述第一抵推面或者所述第二抵推面上。
14.通过采用上述技术方案,操作杆与转动杆转动连接,而转动杆的一端与止退框架的一侧转动连接,转动杆的另一端与止退框架的另一侧弹性连接,保证了操作杆与止退杆弹性连接,同时也保证了操作杆在转动时的稳定性。
15.在一个实施例中,所述手动操作装置还包括转动杆,所述转动杆的一端与所述止退框架的一侧弹性连接,所述转动杆的另一端与所述止退框架的另一侧弹性连接,所述转动杆上设有与所述第一转动轴平行的第二转动轴,所述操作杆与所述转动杆转动连接且能够绕第二转动轴转动,使所述抵推端能够择一地抵推在所述第一抵推面或者所述第二抵推面上。
16.通过采用上述技术方案,转动杆的两端与止退框架的两侧均弹性连接,提高了操作杆的抵推端的在第一抵推面和第二抵推面之间切换的灵活性。
17.在一个实施例中,所述抵推端上设有滑轮,使所述抵推端能够在所述第一抵推面和所述第二抵推面之间滑动。
18.通过采用上述技术方案,滑轮可以提高抵推端在第一抵推面和第二抵推面滑动的顺畅性。
19.在一个实施例中,所述操作杆设有折弯部,所述操作杆从所述折弯部向所述止退板延伸形成所述抵推端,所述操作杆从所述折弯部背离所述止退板延伸形成所述操作端,所述抵推端的长度方向和所述操作端的长度方向成倾斜角。
20.通过采用上述技术方案,操作杆设有折弯部,使得操作杆整体形状呈折弯结构,抵推端和操作端分别位于操作杆的两端,设置折弯部减少了抵推端和操作端之间长度,减少操作杆占用空间,提高操作杆的集成度。
21.在一个实施例中,所述抵推端的长度小于所述操作端的长度。
22.通过采用上述技术方案,可以提高操作端的力矩,使得操作人员以较小的作用力即可驱使抵推端移动,降低操作需要的力度,使得操作更省力。
23.在一个实施例中,所述止退板设有限位套,所述限位套在所述第二抵推面与所述第二抵止面抵接时与所述止退框架抵接。
24.通过采用上述技术方案,限位套进一步提升了止退板在止退状态时的稳定性。
25.在一个实施例中,所述止退框架设有中空槽,所述抵推端伸入所述中空槽中以抵推所述第一抵推面和所述第二抵推面之一,使所述止退板朝所述第一抵止面或者所述第二抵止面转动以在止退状态和释放状态之间切换。
26.通过采用上述技术方案,止退框架的中空槽使得抵推端可以伸入且抵推第一抵推面或者第二抵推面之一,利于操作人员的操作。
27.本实施例还提供一种无人船布放回收设备,包括起吊结构和上述的止退装置,所述止退装置设于所述起吊结构的靠近开口的部分,用于开闭所述开口。
28.通过采用上述技术方案,降低了无人船从起吊结构上滑出的风险。
附图说明
29.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需要使用的
附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.图1是本技术实施例提供的无人船布放回收设备的立体结构图;
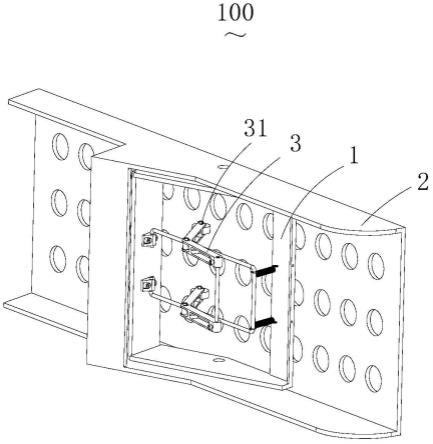
31.图2是本技术实施例提供的止退装置的立体结构图;
32.图3是本技术实施例提供的止退装置的爆炸图;
33.图4是本技术实施例提供的无人船布放回收设备止退状态时的俯视图;
34.图5是本技术实施例提供的无人船布放回收设备释放状态时的俯视图。
35.图中各附图标记为:
36.100-止退装置;200-起吊结构;300-容置槽;400-开口;500-无人船;
37.1-止退框架;2-止退板;3-手动操作装置;
38.11-第一抵止面;12-第二抵止面;13-第一转动轴;14-中空槽;21-第一抵推面;22-第二抵推面;23-限位套;31-抵推端;32-操作杆;33-操作端;34-转动杆;35-第二转动轴;36-滑轮。
具体实施方式
39.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
40.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接位于另一个元件上或者间接位于另一个元件上。当一个元件被称为“连接于”另一个元件,它可以是直接连接或间接连接至另一个元件。
41.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术,而不是指示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
42.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示相对重要性或指示技术特征的数量。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。以下结合具体实施例对本技术的具体实现进行更加详细的描述:
43.如图1所示,本技术实施例提供的一种止退装置100,安装在起吊结构200 上,起吊结构200设有用于容置无人船500的容置槽300和与容置槽300连通的开口400,止退装置100靠近开口400安装,用于开闭开口400,使得无人船 500在开口400打开时进入容置槽300中,当无人船500驶入容置槽300后,止退装置100将开口400关闭,防止无人船500从容置槽300中退出。
44.如图2和图3所示,止退装置100包括:止退框架1、止退板2以及手动操作装置3;止退框架1用于安装在起吊结构200靠近开口400的部分,止退框架1设有第一抵止面11和第二抵止面12,第一抵止面11和第二抵止面12 成倾斜角,止退框架1在第一抵止面11和第二抵止面12之间设有第一转动轴 13;止退板2与止退框架1转动连接,止退板2能够绕第一转动轴13转动,止退板2的靠近止退框架1的表面被第一转动轴13分隔为第一抵推面21和第二抵
推面22,第一抵推面21用于与第一抵止面11抵接,第二抵推面22用于与第二抵止面12抵接;手动操作装置3设有抵推端31,抵推端31用于抵推第一抵推面21和第二抵推面22之一,使止退板2朝第一抵止面11或者第二抵止面 12转动以在止退状态和释放状态之间切换。
45.本实施例提供的止退装置100的工作原理如下:
46.如图4所示,止退板2有多种状态,第一种是止退状态,操作人员将抵推端31抵于第一抵推面21上,使止退板2绕第一转动轴13朝第二抵止面12转动,带动第二抵推面22朝第二抵止面12靠近,直至第二抵推面22与第二抵止面12抵接,此时,止退板2与无人船500进出起吊结构200的移动方向成倾斜角,即止退板2在无人船500的移动路径上突出设置,能够防止已经进入起吊结构200的无人船500从起吊结构200中退出,因此止退板2呈止退状态;
47.如图5所示,第二种是释放状态,操作人员将抵推端31抵推于第二抵推面 22上,使止退板2绕第一转动轴13朝第一抵止面11转动,带动第一抵推面21 朝第一抵止面11靠近,直至第一抵推面21与第一抵止面11抵接,止退板2 与无人船500进出起吊结构200的移动方向平行,且不突出于止退板2在无人船500的移动路径上,无人船500可以自由进出起吊结构200,因此止退板2 呈释放状态。
48.通过采用上述技术方案:
49.止退框架1用于安装在起吊结构200的靠近开口400的部分,操作人员操作抵推端31使得抵推端31择一地抵于止退板2的第一抵推面21和第二抵推面 22上,使得止退板2能够切换释放状态,进而使得无人船500从开口400进入起吊结构200中,然后止退板2切换止退状态,将止退板2突出于无人船500 的移动路径上,降低无人船500从起吊结构200中脱落的风险。
50.请再次参阅图2和图3,在一个实施例中,手动操作装置3包括操作杆32,操作杆32靠近止退板2的一端形成有抵推端31,操作杆32的远离止退板2的一端形成有操作端33,操作杆32与止退框架1弹性连接,且抵推端31能够择一地抵推在第一抵推面21或者第二抵推面22上;操作人员通过转动或者移动的方式,手动转动或者手动移动操作杆32的操作端33,使得抵推端31的抵推在第一抵推面21或者第二抵推面22上,当抵推端31抵推在第一抵推面21时,由于操作杆32与止退框架1弹性连接,弹力使得抵推端31维持抵推第一抵推面21,使得止退板2的第二抵推面22保持与第二抵止面12抵接的状态,即使得止退板2维持止退状态;操作人员手动克服弹力的作用,将抵推端31切换到抵推第二抵推面22,然后在弹力的作用下使得抵推端31维持抵推第二抵推面 22,使得止退板2的第一抵推面21保持与第一抵止面11抵接的状态,即使得止退板2维持释放状态。
51.通过采用上述技术方案,操作杆32与止退框架1弹性连接,利用弹力将止退板2维持在止退状态或者释放状态,保证再不受外力的作用的情况下,止退板2可以保持止退状态或者释放状态,提高止推板的稳定性。
52.在一个实施例中,手动操作装置3还包括转动杆34,转动杆34的一端与止退框架1的一侧转动连接,转动杆34的另一端与止退框架1的另一侧弹性连接,转动杆34上设有与第一转动轴13平行的第二转动轴35,操作杆32与转动杆34转动连接且能够绕第二转动轴35转动,使抵推端31能够择一地抵推在第一抵推面21或者第二抵推面22上。
53.具体地,转动杆34与止退框架1转动连接,转动杆34能够朝靠近止退板 2和背离止退板2的方向转动,使得转动连接在转动杆34上的操作杆32也随着转动杆34的转动而靠近
和背离止退板2,进而使得操作杆32上的抵推端31 能够在第一抵推面21和第二抵推面22之间切换抵推。
54.通过采用上述技术方案,操作杆32与转动杆34转动连接,而转动杆34 的一端与止退框架1的一侧转动连接,转动杆34的另一端与止退框架1的另一侧弹性连接,保证了操作杆32与止退框架1弹性连接,同时也保证了操作杆 32在转动时的稳定性。
55.在另一个实施例中,与上述实施例的不同之处在于:
56.手动操作装置3还包括转动杆34,转动杆34的一端与止退框架1的一侧弹性连接,转动杆34的另一端与止退框架1的另一侧弹性连接,转动杆34上设有与第一转动轴13平行的第二转动轴35,操作杆32与转动杆34转动连接且能够绕第二转动轴35转动,使抵推端31能够择一地抵推在第一抵推面21 或者第二抵推面22上。
57.具体地,转动杆34的两端与止退框架1的两侧均弹性连接,转动杆34能够朝靠近止退板2和背离止退板2的方向移动,使得转动连接在转动杆34上的操作杆32也随着转动杆34的移动而靠近和背离止退板2,进而使得操作杆32 上的抵推端31能够在第一抵推面21和第二抵推面22之间切换抵推。
58.通过采用上述技术方案,转动杆34的两端与止退框架1的两侧均弹性连接,提高了操作杆32的抵推端31的在第一抵推面21和第二抵推面22之间切换的灵活性。
59.在一个实施例中,抵推端31上设有滑轮36,使抵推端31能够在第一抵推面21和第二抵推面22之间滑动。
60.通过采用上述技术方案,滑轮36可以提高抵推端31在第一抵推面21和第二抵推面22滑动的顺畅性。
61.在一个实施例中,操作杆32设有折弯部,操作杆32从折弯部向止退板2 延伸形成抵推端31,操作杆32从折弯部背离止退板2延伸形成操作端33,抵推端31的长度方向和操作端33的长度方向成倾斜角。
62.通过采用上述技术方案,操作杆32设有折弯部,使得操作杆32整体形状呈折弯结构,抵推端31和操作端33分别位于操作杆32的两端,设置折弯部减少了抵推端31和操作端33之间长度,减少操作杆32占用空间,提高操作杆 32的集成度。
63.在一个实施例中,抵推端31的长度小于操作端33的长度。
64.通过采用上述技术方案,可以提高操作端33的力矩,使得操作人员以较小的作用力即可驱使抵推端31移动,降低操作需要的力度,使得操作更省力。
65.在一个实施例中,止退板2设有限位套23,限位套23在第二抵推面22与第二抵止面12抵接时与止退框架1抵接。
66.通过采用上述技术方案,限位套23进一步提升了止退板2在止退状态时的稳定性。
67.在一个实施例中,止退框架1设有中空槽14,抵推端31伸入中空槽14中以抵推第一抵推面21或者第二抵推面22之一,使止退板2朝第一抵止面11 或者第二抵止面12转动以在止退状态和释放状态之间切换。
68.通过采用上述技术方案,止退框架1的中空槽14使得抵推端31可以伸入且抵推第一抵推面21或者第二抵推面22之一,利于操作人员的操作。
69.本实施例还提供一种无人船布放回收设备,包括起吊结构200和上述的止退装置100,止退装置100设于起吊结构200的靠近开口400的部分,用于开闭开口400。
70.具体地,起吊结构200设有用于容置无人船500的容置槽300和与容置槽 300连通的开口400,止退装置100靠近开口400安装,用于开闭开口400,使得无人船500在开口400打开时进入容置槽300中,当无人船500驶入容置槽 300后,止退装置100将开口400关闭,防止无人船500从容置槽300中退出。
71.通过采用上述技术方案,降低了无人船500从起吊结构200上滑出的风险。
72.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1