一种多旋翼载人飞行器的电机转速调节系统的制作方法
1.本实用新型是一种多旋翼载人飞行器的电机转速调节系统,属于电机调速控制技术领域。
背景技术:
2.随着飞行汽车的兴起,载人飞行汽车日益成熟,其采用的动力系统主要为电动多旋翼系统,特别对于大载重的飞行汽车或载人飞行器,需要配套6个或8个或以上的旋翼,从而要求用于控制电机的电子调速器离飞控系统较远,而且布局在多旋翼包围的电磁环境复杂的空间内,导致传统电机调速系统的pwm输入信号在飞行过程中受电磁干扰严重,影响飞行安全,甚至导致严重的飞行事故。另外由于多旋翼的应用,每个旋翼均需要配套一个电机调速系统,传统电机调速系统采用pwm的控制方式,要求飞控系统具备6个或8个或更多的pwm信号输出接口,大大增加飞控设计复杂度。
3.因此,针对上述载人飞行器采用传统电机调速系统的痛点问题,提出了一种多旋翼载人飞行器新型电机调速系统。
技术实现要素:
4.本实用新型要解决的技术问题是针对以上不足,提供一种多旋翼载人飞行器的电机转速调节系统,摒弃了传统的pwm信号输入方案,彻底解决了传统方案中pwm信号传输抗干扰能力弱的痛点问题,can总线长距离可靠传输以及拓扑网络结构特性,具有出色的抗电磁干扰能力,完全适配载人飞行器高可靠、大尺寸、多旋翼的要求,可广泛应用于各种载人飞行器。
5.为解决以上技术问题,本实用新型采用以下技术方案:
6.一种多旋翼载人飞行器的电机转速调节系统,包括控制系统、双冗余can总线接口、转速采集模块和电机驱动电路,控制系统连接双冗余can总线接口、转速采集模块和电机驱动电路,转速采集模块和电机驱动电路连接有外部电机。
7.进一步的,所述控制系统包括高可靠嵌入式处理器、时钟复位电路、sram单元、调试接口和flash单元,高可靠嵌入式处理器连接时钟复位电路、sram单元、调试接口和flash单元。
8.进一步的,所述高可靠嵌入式处理器包括芯片u1a和芯片u1b,芯片u1a和芯片u1b的型号为s698-t。
9.进一步的,所述高可靠嵌入式处理器还包括芯片osc1,芯片osc1的1脚连接有电阻r26一端,电阻r26另一端连接有芯片osc1的4脚、电容c4一端、电容c1一端和电感l1一端,电容c1另一端和电容c4另一端接地,电感l1另一端接vcc_3.3v电源,芯片osc1的3脚连接有电阻r29一端,电阻r29另一端连接有电容c9一端和芯片u1a的ar7脚,电容c9另一端接地。
10.进一步的,所述高可靠嵌入式处理器还包括芯片osc2,芯片osc2的1脚连接有电阻r27一端,电阻r27另一端连接有芯片osc2的4脚、电容c5一端、电容c2一端和电感l2一端,电
容c2另一端和电容c5另一端接地,电感l2另一端接vcc_3.3v电源,芯片osc2的3脚连接有电阻r30一端,电阻r30另一端连接有电容c7一端和芯片u1a的n31脚,电容c7另一端接地。
11.进一步的,所述高可靠嵌入式处理器还包括芯片osc3,芯片osc3的1脚连接有电阻r28一端,电阻r28另一端连接有芯片osc3的4脚、电容c3一端、电容c6一端和电感l3一端,电容c3另一端和电容c6另一端接地,电感l3另一端接vcc_3.3v电源,芯片osc3的3脚连接有电阻r31一端,电阻r31另一端连接有电容c8一端和芯片u1a的p32脚,电容c8另一端接地。
12.进一步的,所述时钟复位电路包括芯片u3,芯片u3的型号为imp811teust-t,芯片u3的3脚连接有电阻r39一端、开关k1的3脚和4脚、二极管d104一端和二极管d22一端,电阻r39另一端接vcc_3.3v电源,开关k1的1脚和2脚接地,二极管d104另一端连接有,二极管d22另一端连接有芯片u1a的ap12脚,芯片u3的2脚连接有电阻r40一端和芯片u1a的aa35脚,电阻r40另一端接vcc_3.3v电源,芯片u3的4脚连接有电容c11一端,并接vcc_3.3v电源,电容c11另一端接地。
13.进一步的,所述双冗余can总线接口包括1#can总线收发器、1#光耦隔离、2#can总线收发器、2#光耦隔离,1#can总线收发器连接1#光耦隔离,2#can总线收发器连接2#光耦隔离。
14.本实用新型采用以上技术方案,与现有技术相比,具有如下技术效果:
15.摒弃了传统的pwm信号输入方案,彻底解决了传统方案中pwm信号传输抗干扰能力弱的痛点问题,can总线长距离可靠传输以及拓扑网络结构特性,具有出色的抗电磁干扰能力,完全适配载人飞行器高可靠、大尺寸、多旋翼的要求,可广泛应用于各种载人飞行器。
附图说明
16.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
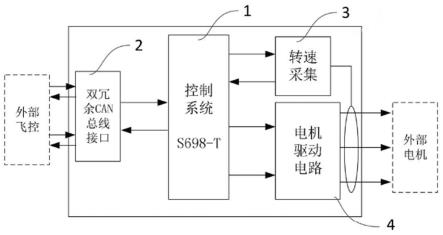
17.图1为本实用新型实施例所述的多旋翼载人飞行器新型电子调速器的系统框图;
18.图2为本实用新型实施例所述的控制系统的系统框图;
19.图3为本实用新型实施例所述的双冗余can总线接口的系统框图;
20.图4为本实用新型实施例所述的信息电子调速器组网应用示意图;
21.图5和图6为本实用新型实施例中高可靠嵌入式处理器的部分电路图;
22.图7为本实用新型实施例中时钟复位电路的电路图;
23.图8为本实用新型实施例中高可靠嵌入式处理器的部分电路图。
具体实施方式
24.实施例1,如图1所示,一种多旋翼载人飞行器的电机转速调节系统,包括控制系统1、双冗余can总线接口2、转速采集模块3和电机驱动电路4,控制系统1连接双冗余can总线接口2、转速采集模块3和电机驱动电路4,转速采集模块3和电机驱动电路4连接有外部电机,控制系统1主要实现所述新型电子调速器的控制功能,实时接收并解析can总线接口接收到的控制指令,根据指令控制电机驱动电路4输出外部电机的控制信号,同时控制转速采
集模块3实时采集外部电机驱动信号的电流大小及方向,计算出外部电机的转速,并根据需要对外部电机的控制信号进行微调;所述双冗余can总线接口2,提供互相独立的互为备份的两个can总线接口,通过can总线网络实现与飞控系统的数据交互,接收飞控系统发送过来的控制指令,并将自身的工作状态参数发送给飞控系统;所述转速采集模块3主要实现外部电机控制信号的电流大小、方向的采集,并将采集结果提供给所述控制系统1,由控制系统1计算出外部电机的转速参数;所述电机驱动电路4主要由大功率mosfet管组成的桥电路组成,实现外部电机控制信号的输出。
25.如图2所示,所述控制系统1包括高可靠嵌入式处理器101、时钟复位电路102、sram单元103、调试接口104和flash单元105,高可靠嵌入式处理器101连接时钟复位电路102、sram单元103、调试接口104和flash单元105,所述高可靠嵌入式处理器101采用s698-t,作为所述新型电子调速器的主控制器,提供can总线接口数据控制管理、数据分析解算、业务管理等功能;所述时钟复位电路102为所述高可靠嵌入式处理101提供复位;所述sram单元103为所述高可靠嵌入式处理器101提供数据存储器;所述调试接口104为所述高可靠嵌入式处理器101提供调试接口;所述flash单元105为所述高可靠嵌入式处理器101提供程序存储器。
26.如图5和图6所示,所述高可靠嵌入式处理器101包括芯片u1a和芯片u1b,芯片u1a和芯片u1b的型号为s698-t。
27.如图8所示,所述高可靠嵌入式处理器101还包括芯片osc1,芯片osc1的1脚连接有电阻r26一端,电阻r26另一端连接有芯片osc1的4脚、电容c4一端、电容c1一端和电感l1一端,电容c1另一端和电容c4另一端接地,电感l1另一端接vcc_3.3v电源,芯片osc1的3脚连接有电阻r29一端,电阻r29另一端连接有电容c9一端和芯片u1a的ar7脚,电容c9另一端接地。
28.所述高可靠嵌入式处理器101还包括芯片osc2,芯片osc2的1脚连接有电阻r27一端,电阻r27另一端连接有芯片osc2的4脚、电容c5一端、电容c2一端和电感l2一端,电容c2另一端和电容c5另一端接地,电感l2另一端接vcc_3.3v电源,芯片osc2的3脚连接有电阻r30一端,电阻r30另一端连接有电容c7一端和芯片u1a的n31脚,电容c7另一端接地。
29.所述高可靠嵌入式处理器101还包括芯片osc3,芯片osc3的1脚连接有电阻r28一端,电阻r28另一端连接有芯片osc3的4脚、电容c3一端、电容c6一端和电感l3一端,电容c3另一端和电容c6另一端接地,电感l3另一端接vcc_3.3v电源,芯片osc3的3脚连接有电阻r31一端,电阻r31另一端连接有电容c8一端和芯片u1a的p32脚,电容c8另一端接地。
30.所述芯片osc1、芯片osc2和芯片osc3构成高可靠嵌入式处理器101的有源晶振电路。
31.如图7所示,所述时钟复位电路102包括芯片u3,芯片u3的型号为imp811teust-t,芯片u3的3脚连接有电阻r39一端、开关k1的3脚和4脚、二极管d104一端和二极管d22一端,电阻r39另一端接vcc_3.3v电源,开关k1的1脚和2脚接地,二极管d104另一端连接有,二极管d22另一端连接有芯片u1a的ap12脚,芯片u3的2脚连接有电阻r40一端和芯片u1a的aa35脚,电阻r40另一端接vcc_3.3v电源,芯片u3的4脚连接有电容c11一端,并接vcc_3.3v电源,电容c11另一端接地。
32.如图3所示,所述双冗余can总线接口2包括1#can总线收发器201、1#光耦隔离202、
2#can总线收发器203、2#光耦隔离204组成,所述1#can总线收发器201和2#总线收发器203采用专用的can总线收发器芯片设计,实现can总线信号电平的转换;所述1#光耦隔离202和2#光耦隔离204采用光耦隔离器件设计,实现上述新型电子调速器外部通信接口的电气隔离。
33.所述多旋翼载人飞行器新型电子调速器摒弃了传统飞行器所用的pwm信号控制方案,采用了便于组网扩展、具有良好抗干扰能力的双冗余can总线接口,can总线采用屏蔽双绞线作为通信介质,不但抗干扰能力强,而且协议上具有良好的容错能力。另外双冗余总线接口架构,进一步提升了接口通信的可靠性。
34.如图4所示,基于can总线网络,可通过网络节点的方式,快速扩展增加所述多旋翼载人飞行器新型电子调速器,适应于各自不同尺寸、不同旋翼的载人飞行器,具有安全、可靠的先天优势。
35.本实用新型的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好的说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1