红外感应垃圾袋破袋机的制作方法
[0001]
本发明涉及垃圾收集处理技术领域,特别是一种红外感应垃圾袋破袋机。
背景技术:
[0002]
在垃圾分类的时代,在倒易腐垃圾时,如果易腐垃圾是用塑料垃圾袋装的,要先将塑料袋内的易腐垃圾倒在易腐垃圾桶内,再将装易腐垃圾的垃圾袋扔到干垃圾桶内,因为垃圾袋属于干垃圾,不属于易腐垃圾,在倒易腐垃圾的过程中,因需要将垃圾袋反过来倾倒里面的湿垃圾,所以这经常会引起湿垃圾弄脏手和弄脏衣服的情况发生。这个倒湿垃圾的过程很麻烦,弄脏手或衣服更是让人心中不适,另外,由于袋装垃圾所用的垃圾袋大小不一,有的大袋套小袋,有个袋子很结实,袋内垃圾成分十分复杂,增大破袋难度,因此破袋已成为垃圾预处理的一大关键;并且大部分的垃圾袋破袋机,体积过于庞大,并不方便移动,垃圾桶与破袋装置一体化,后续垃圾传输处理难,智能化较低,并不会自行判断有无垃圾袋的投入,需要人工的启动,耗时耗力,还有一部分的垃圾袋破袋机采用开放设计,破袋的装置直接裸露,安全隐患较大。
技术实现要素:
[0003]
本发明的目的是为了解决上述现有技术的不足而提供一种红外感应垃圾袋破袋机。
[0004]
为了实现上述目的,本发明所设计的红外感应垃圾袋破袋机,它包括支架,所述支架包括支撑架、放置架,所述放置架上设有底盘组件,所述底盘组件包括底盘、刀片切割组件、控制刀片切割组件的控制组件,所述底盘上设有切割口,所述控制组件包括相互电气连接的红外感应装置、控制主板所述底盘组件上设有外壳,所述外壳上设有与切割口相配合的进料口。
[0005]
为了更好的支撑底盘组件以及投放垃圾桶,所述支撑架包括底杆、连接杆、支撑杆,所述支撑杆分别连接底杆和放置架,并呈“凵”字结构,所述连接杆设置在支撑杆之间。
[0006]
为了方便破袋,所述切割口为三角形,所述三角形包括三角形底边与两侧的三角形斜边,所述三角形斜边上均设有刀片切割组件,所述三角形底边上设有红外感应装置。
[0007]
所述切割口为梯形,所述梯形包括梯形底边与梯形斜边,所述梯形斜边上均设有刀片切割组件,所述梯形底边上设有红外感应装置。
[0008]
为了更智能的破袋,所述刀片切割组件包括电机模组、传动模组、刀片模组,所述电机模组包括电机,所述电机与控制主板电气连接,所述刀片模组包括刀片支架、切割刀片,所述刀片支架固定在底盘上,所述切割刀片包括刀头,所述红外感应装置包括红外发生端与红外接收端,所述红外发生端与红外接收端相对放置在切割口处。
[0009]
为了更方便的破袋,所述传动模组上设有保护外壳,所述保护外壳固定在底盘上,所述传动模组包括固定滑块、大齿轮、传动齿轮、小齿轮,所述大齿轮上设有固定滑块,所述传动齿轮包括与小齿轮啮合的传动上齿、与大齿轮啮合的传动下齿,所述小齿轮与电机配
合转动连接,所述切割刀片上设有主导向槽,所述主导向槽上设有相匹配的导向环,所述导向环与固定滑块相互配合,所述固定滑块包括偏心轮、固定块。
[0010]
为了让切割刀片跟稳定,所述切割刀片上还设有副导向槽,所述刀片支架上设有固定孔,所述刀片支架与切割刀片上设有导向装置,所述导向装置包括螺钉、导向片、螺母,所述导向片设置在螺钉上,所述螺钉先后穿过副导向槽、固定孔并与螺母连接固定。
[0011]
为了让垃圾袋投放更加便利、安全,所述外壳上还设有滑道支架,所述滑道支架上设有滑道,所述滑道呈漏斗状。
[0012]
为了让破袋的刀头强度更高,所述刀头呈锯齿状。
[0013]
本发明得到的红外感应垃圾袋破袋机,利用红外感应装置实现了垃圾袋投入时自动的破袋,高效率、高智能化,并且本产品体积小、方便移动,刀片切割组件不裸露让垃圾袋投放更加便利、更好的保护人的安全。
附图说明
[0014]
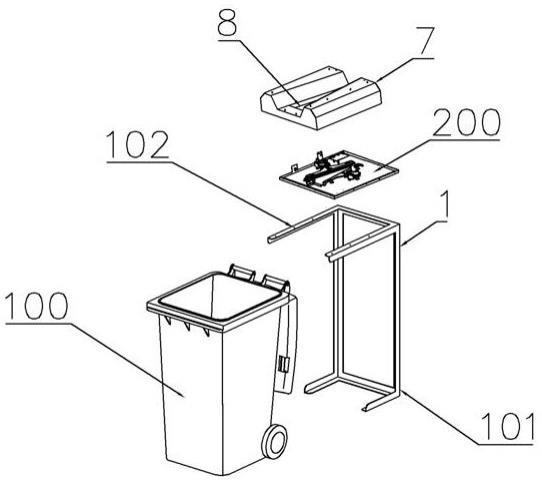
图1是实施例1中红外感应垃圾袋破袋机的爆炸图;图2是实施例1中底盘组件的结构示意图;图3是实施例2中刀片切割组件的结构示意图;图4是实施例2中底盘组件的结构示意图;图5是实施例2中刀片切割组件爆炸图;图6是实施例2中传动模组的爆炸图;图7是实施例2中切割刀片的结构示意图;图8是实施例2中刀片模组爆炸图;图9是实施例2中导向装置的结构示意图;图10是实施例3中红外感应垃圾袋破袋机的爆炸图。
[0015]
图中:支架1、底盘2、刀片切割组件3、切割口4、红外接收发送装置5、控制主板6、外壳7、进料口8、传动模组9、刀片模组10、电机11、刀片支架14、切割刀片15、红外发生端16、红外接收端17、保护外壳18、固定滑块19、大齿轮20、传动齿轮21、小齿轮22、偏心轮23、固定块24、滑块槽25、传动上齿26、传动下齿27、导向装置28、导向环29、固定孔30、主导向槽31、副导向槽32、刀头33、滑道支架34、滑道35、通道36、垃圾桶100、支撑架101、放置架102、底盘组件200、导向片281、螺钉280、螺母282、底杆300、连接杆301、支撑杆302。
具体实施方式
[0016]
下面结合附图和实施例对本发明进一步说明。
[0017]
实施例1:本实施例描述的红外感应垃圾袋破袋机,如图1、图2所示,它包括支架1,所述支架1包括支撑架101、放置架102,所述放置架102上设有底盘组件200,所述底盘组件200包括底盘2、刀片切割组件3、控制刀片切割组件3的控制组件,所述底盘2上设有切割口4,所述控制组件包括相互电气连接的红外感应装置5、控制主板6所述底盘组件200上设有外壳7,所述外壳7上设有与切割口4相配合的进料口8。
[0018]
所述切割口4为三角形,所述三角形包括三角形底边与两侧的三角形斜边,所述三
角形斜边上均设有刀片切割组件3,所述三角形底边上设有红外感应装置5。
[0019]
为了更好的固定底盘组件以及投放垃圾桶,所述支撑架101包括底杆300、连接杆301、支撑杆302,所述支撑杆302分别连接底杆300和放置架102,并呈“凵”字结构,所述连接杆301设置在支撑杆302之间。
[0020]
本实施例中,将垃圾桶100推入放置架102下方的支撑架101内,并且垃圾桶100对准切割口4,故完成了垃圾桶100的投入,且由于垃圾桶100并不是固定在支架1上,当垃圾桶装满垃圾时,人员可以直接将垃圾桶推出,该支架1的结构简单,方便了人员对垃圾桶100的操作。
[0021]
在安装红外感应垃圾袋破袋机时,可以将底盘组件200用螺栓螺母固定在放置架102上,再将外壳7安装在底盘2上,外壳7很好的保护了底盘组件200,外壳7上的进料口方便用户将垃圾袋投入到切割口4内,并且不暴露内部的刀片切割组件3,有效的防止用户不与刀片切割组件3接触,从而保护了用户的安全。
[0022]
当装有垃圾的垃圾袋进入到切割口4时,红外感应装置5会识别到垃圾袋,红外感应装置5向控制主板6发送电信号,电信号经过控制主板6的处理,控制主板6控制刀片切割组件3将垃圾袋破袋。
[0023]
由于三角形的切割口8,且两组的刀片切割组件3分别设置两侧的三角形斜边上,在不同大小的垃圾袋投入时,用户可以自行选择将垃圾袋投放在切割口8合适的地方,让刀片切割组件3切割垃圾袋,即可切割不同大小的垃圾袋。
[0024]
本实施例提供的红外感应垃圾袋破袋机,红外感应装置实现了垃圾袋投入时自动的破袋,高效率、高智能化,使人们在倒易腐垃圾时方便轻松,不用怕被易腐垃圾弄脏手和衣服。
[0025]
实施例2:本实施例描述的红外感应垃圾袋破袋机,如图3至图5所示,除实施例1所述特征外,为了更智能的破袋,所述刀片切割组件3包括电机模组、传动模组9、刀片模组10,所述电机模组包括电机11,所述电机11与控制主板6电气连接,所述刀片模组10包括刀片支架14、切割刀片15,所述刀片支架14固定在底盘2上,所述切割刀片15包括刀头33,所述红外感应装置5包括红外发生端16与红外接收端17,所述红外发生端16与红外接收端17相对放置在切割口4处。
[0026]
所述切割口4为梯形,所述梯形包括梯形底边与梯形斜边,所述梯形斜边上均设有刀片切割组件3,所述梯形底边上设有红外感应装置5。
[0027]
如图5至图7所示,为了更方便的破袋,所述传动模组9上设有保护外壳18,所述保护外壳18固定在底盘2上,所述传动模组9包括固定滑块19、大齿轮20、传动齿轮21、小齿轮22,所述大齿轮20上设有固定滑块19,所述传动齿轮21包括与小齿轮22啮合的传动上齿26、与大齿轮20啮合的传动下齿27,所述小齿轮22与电机11配合转动连接,所述切割刀片14上设有主导向槽31,所述主导向槽31上设有相匹配的导向环29,所述导向环29与固定滑块19相互配合,所述固定滑块19包括偏心轮23、固定块24。
[0028]
如图6至图9所示,为了让切割刀片跟稳定,所述切割刀片15上还设有副导向槽32,所述刀片支架14上设有固定孔30,所述刀片支架14与切割刀片15上设有导向装置28,所述导向装置包括螺钉280、导向片281、螺母282,所述导向片281设置在螺钉280上,所述螺钉
280先后穿过副导向槽32、固定孔30并与螺母282连接固定。
[0029]
为了让破袋的刀头强度更高,所述刀头33呈锯齿状。
[0030]
本实施例中,将刀片切割组件3对称的设置在梯形斜边上,然后将红外接受端17和红外发射端16分别对称的设置在梯形两地边上,使得红外接受端17能一直接收到红外发射端16的信号。
[0031]
在实际工作过程当中,当装有垃圾的垃圾袋进入破袋机,红外接受端17接收不到红外发射端16射出的光线时,红外发射端16向控制主板6发出电信号,电信号经过控制主板6的处理,控制电机11,电机转动并带传动模组9的小齿轮22,高速转动的小齿轮22经过传动齿轮21传动到大齿轮20,大齿轮20实现低速转动,由于大齿轮20上安装有和大齿轮20非同心的固定滑块19,固定滑块19会跟着大齿轮20一起转动,固定滑块19作用在切割刀片15上的导向环29上,导向环29在固定滑块19的作用下,带动切割刀片15做单一方向上的来回切割运动,并且固定块24 会防止固定滑块19脱离导向环29,切割刀片15会随着导向环29的转动做一个来回往复摆动,从而达到切割垃圾袋的作用。并且导向装置28使得切割刀片15在运动时候,并不受垃圾袋的影响从而脱离刀片支架14。
[0032]
其中,在传动模组9的传动齿轮的传动上齿26与传动下齿27的齿数比为30/11,小齿轮22的齿数为8,大齿轮22的齿数为51,并且电机11在电压9v下,其转速为17500rpm,经过传动模组9的减速后,大齿轮22的转速通过计算可以得出其转速为:(17500rpm*8/30)*11/51=1006rpm,大齿轮22转动一圈代表切割刀片15来回切割一次,由此可得出切割刀片15的切割频率为1006次/分钟,也就是16次/秒。这个切割频率保证了垃圾袋的切割效率,能保证垃圾袋能快速被切割破袋。
[0033]
梯形的切割口8,使得可以投放更大的垃圾袋。
[0034]
本实施例提供的红外感应垃圾袋破袋机,提升垃圾袋破袋高效率、高智能化,并且本产品体积小、方便移动,可靠性高。
[0035]
实施例3:本实施例描述的红外感应垃圾袋破袋机,如图10所示,除实施例2所述特征外,所述外壳7上还设有滑道支架34,所述滑道支架34上设有滑道35,所述滑道35呈漏斗状。
[0036]
在本实施例中, 漏斗状的滑道35上方便了装有垃圾的垃圾袋投入,并且延长了人与刀片切割组件3的距离,让垃圾袋投放更加便利、安全从而更好的保护人的安全。
[0037]
本实施例提供的红外感应垃圾袋破袋机,只要在投放垃圾袋时,将垃圾袋放入到破袋机的滑道35的内部,就可自行破袋,垃圾袋内的垃圾会自行掉进垃圾桶,不需要将垃圾袋反过来倾倒垃圾。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1