回转式解冻库自动工作系统的制作方法
[0001]
本发明属于物品解冻技术领域,尤其涉及一种回转式解冻库自动工作系统。
背景技术:
[0002]
目前,国内大多数食品行业,尤其是涉及到冷冻肉类原料需解冻的企业,在解冻流水线的操作上存在不足,大量的工作需要人工处理,从而导致整个过程存在劳动强度大、自动化程度低、生产效率低的问题。
[0003]
例如,中国发明专利申请公开了一种多功能冻结保鲜-解冻库[申请号:201610046298.9],该发明申请包括冷库本体和安装在所述冷库本体内部的冻结解冻装置,所述冷库本体内部设置有用于放置食品的架子,所述冻结解冻装置包括:制冷装置,用于产生冷风使所述冷库本体内的温度降低;蒸汽加热装置,用于使所述冷库本体内的温度升高、湿度增大;电场装置,用于产生电场使放置在所述架子上的食品处于电场的环境中;其中,冻结时,开启所述制冷装置和所述电场装置,使所述架子上的食品处于低温和电场的环境中进行降温冻结;解冻时,开启所述蒸汽加热装置和所述电场装置,使所述架子上冻结的食品处于高温和电场的环境中,进行升温保湿解冻,冻结时设置的电场强度大于解冻时设置的电场强度。
[0004]
该发明申请具有在解冻过程中营养流失较少,解冻速率较快的优势,但其仍未解决上述问题。
技术实现要素:
[0005]
本发明的目的是针对上述问题,提供一种自动化程度高、生产效率高的回转式解冻库自动工作系统。
[0006]
一种回转式解冻库自动工作系统,包括解冻回转系统和用于将解冻箱装入或移出解冻回转系统的装卸料装置,所述解冻回转系统包括若干个运输小车和与运输小车驱动连接的动力组件,所述动力组件包括首尾相连呈环形的轨道和位于轨道内的牵引链条,所述牵引链条沿轨道移动并驱动运输小车;所述装卸料装置包括可抓取解冻箱的机器人,还包括焯水机、滚筒输送装置、洗筐机和用于转移运输解冻箱的运输小车,所述机器人的一端可在焯水机、滚筒输送装置、洗筐机和运输小车之间转移,所述洗筐机设置在焯水机的一侧,洗筐机远离焯水机的一端通过往复式提升机与滚筒输送装置相连通。
[0007]
在上述的回转式解冻库自动工作系统中,所述焯水机包括焯水机机架和固定连接在焯水机机架上的焯水机主体,所述焯水机主体内具有焯水空腔,焯水空腔连通有向上的开口,所述焯水机还包括连接在焯水机机架上的漏斗,所述漏斗的正下方设有输送链,所述输送链位于开口的正上方,所述焯水机主体的一端设有食品出料口,所述输送链的输送方向为远离食品出料口的方向,移动机器人可使机器人的一端位于漏斗的上方。
[0008]
在上述的回转式解冻库自动工作系统中,所述机器人包括固定设置在地面上的基座和与基座转动连接的活动部,所述活动部远离基座的一端设有用于抓取解冻箱的抓持组
件,移动抓持组件可使抓持组件压设在解冻箱的外侧壁上;
[0009]
所述抓持组件包括连接在活动部的安装平台,所述安装平台上设有直线驱动结构,夹持板与直线驱动结构驱动连接,所述夹持板上表面凸出有两个拉钩,驱动夹持板可使解冻箱位于两个拉钩之间,所述安装平台的两侧还各固定连接有一块限位板,所述限位板远离安装平台的一端具有限位弯折,所述限位弯折与限位板相垂直,所述安装平台上还转动连接有滚动支撑体,所述滚动支撑体包括呈圆柱体的滚轴和/或呈球形的滚珠。
[0010]
在上述的回转式解冻库自动工作系统中,所述往复式提升机包括位于洗筐机一端且与洗筐机相连通的第一提升结构和位于滚筒输送装置一端且与滚筒输送装置相连通的第二提升结构,所述第一提升结构和第二提升结构之间通过水平输送带相连通,用于夹持解冻箱的转移夹爪与水平输送带驱动连接。
[0011]
在上述的回转式解冻库自动工作系统中,还包括若干个设置在往复式提升机内的称重滚筒输送机,所述称重滚筒输送机包括机架,所述机架上转动连接有若干根输送辊,驱动电机与输送辊驱动连接,所述机架上还设有重量传感器,机架的上表面设有光电传感器。
[0012]
在上述的回转式解冻库自动工作系统中,所述滚筒输送装置包括安装框架,所述安装框架上设有第一输送线和第二输送线,所述第一输送线位于第二输送线的上方,所述第一输送线和第二输送线的靠近往复式提升机的一端均与往复式提升机相连通,第一输送线和第二输送线远离往复式提升机的一端均设有停止挡块,移动位于第一输送线或第二输送线上的解冻箱可使解冻箱压设在停止挡块上。
[0013]
在上述的回转式解冻库自动工作系统中,还包括设置在运输小车上的首车检测片,且首车检测片仅设置在其中一个运输小车上,还包括感应器,移动运输小车可使首车检测片与感应器相互感应识别;
[0014]
所述动力组件包括固定在地面上的支架,所述轨道固定连接在支架上并位于运输小车上方,所述运输小车上端固定连接有链条牵引件,所述牵引链条与链条牵引件相连接。
[0015]
在上述的回转式解冻库自动工作系统中,所述运输小车包括小车框架和用于放置解冻物品的搁置件,所述搁置件连接在小车框架上,所述小车框架底部设有滚轮,所述小车框架上还设有集水组件,所述集水组件与搁置件表面相连通;
[0016]
所述集水组件包括设置在小车框架底部的集水盘,至少一个输水结构与集水盘相连通,所述输水结构与至少一个搁置件相连通,所述输水结构为连接在小车框架上且位于小车框架一侧的输水槽,所述输水槽沿竖直方向延伸并依次与位于同一竖直位置的搁置件相连通,输水槽底端位于集水盘的上方,所述输水槽与搁置件之间还设有集水槽,所述集水槽位于搁置件的一端且分别与搁置件和输水槽相连通,集水槽设有若干条且每条集水槽相互平行,位于同一竖直高度的搁置件对应同一条集水槽,所述输水槽设有若干条且每条输水槽相互平行,每条集水槽分别与若干条输水槽相连通,每条输水槽分别与若干条集水槽相连通,所述集水盘靠近输水槽的一侧固定连接有导水板,所述导水板向外倾斜设置,所述导水板位于输水槽的正下方,所述集水盘两侧对称设置有集水盘导轨,所述集水盘导轨凸出集水盘侧面;
[0017]
所述搁置件上表面固定设置有垫块,所述垫块上端包括用于支撑盛放解冻物品的解冻箱的支撑面,所述支撑面在竖直方向上的高度由靠近集水组件的一侧向远离集水组件的一侧逐渐增大,所述支撑面上表面凸出有限位挡板。
[0018]
在上述的回转式解冻库自动工作系统中,还包括可规整运输小车运动方向的定位组件,所述运输小车沿与动力组件提供的动力相垂直的方向运动可使运输小车压设在定位组件上;
[0019]
所述定位组件包括固定设置的第一定位轨道和第二定位轨道,所述第一定位轨道和第二定位轨道之间具有空腔,所述运输小车上设有导向件,移动运输小车可使导向件的一端延伸至空腔内;
[0020]
所述空腔沿运输小车的运动方向依次包括导向空腔和限位空腔,所述导向空腔和限位空腔相互连通,且导向空腔的宽度由远离限位空腔的一端向靠近限位空腔的一端逐渐减小,所述空腔沿运输小车的运动方向依次包括导向空腔和限位空腔,所述导向空腔和限位空腔相互连通,且导向空腔的宽度由远离限位空腔的一端向靠近限位空腔的一端逐渐减小;
[0021]
所述定位组件还包括沿运输小车的运动方向依次设置的减速传感器和停止传感器。
[0022]
在上述的回转式解冻库自动工作系统中,所述装卸料装置的工作方法包括只进行装料工作的装料模式、只进行卸料工作的卸料模式、同时进行装料工作和卸料工作的混合模式和针对无需进行解冻的物品的其他模式;
[0023]
所述装料模式包括以下工作步骤:
[0024]
步骤一:运输小车移动至指定位置后,利用测距传感器测量与运输小车之间的距离,并将测量结果反馈至控制系统;
[0025]
步骤二:控制系统控制机器人将空的解冻箱从运输小车内取出,放置在输送装置上,解冻箱经输送装置输送至人工取箱处,人工取下解冻箱后装满冷冻的物品原材料;
[0026]
步骤三:将装满冷冻物品原材料的解冻箱人工放置到称重滚筒输送机上称重,称重结果反馈记录至控制系统;
[0027]
步骤四:称重结果记录后,称重滚筒输送机与输送装置将装满冷冻物品原材料的解冻箱输送至机器人抓取的指定位置;
[0028]
步骤五:机器人将装满冷冻物品原材料的解冻箱抓取后放入运输小车内,当一辆运输小车装满后,移动换下一辆,直至装料结束;
[0029]
所述卸料模式包括以下工作步骤:
[0030]
步骤一:解冻完成后,将运输小车移动至指定位置,利用测距传感器测量与运输小车之间的距离,并将测量结果反馈至控制系统;
[0031]
步骤二:控制系统控制机器人把运输小车内的解冻箱取出并将解冻后的物品原材料倒于焯水机内;
[0032]
步骤三:机器人将倒掉物品原材料的解冻箱放于洗筐机内,经清洗后解冻箱从洗筐机另一端出来进入往复式提升机内;
[0033]
步骤四:控制系统控制复式提升机将解冻箱输送至输送装置上,经输送装置输送至机器人指定的空箱抓取位置;
[0034]
步骤五:机器人将空的解冻箱抓取放置于运输小车内,当装有物品原料的解冻箱取出完且清洗后的解冻箱都已放进运输小车后,运输小车移动换下一辆运输小车,直至卸料结束;
[0035]
所述混合模式包括以下工作步骤:
[0036]
步骤一:解冻完成后,将运输小车移动至指定位置,利用测距传感器测量与运输小车之间的距离,并将测量结果反馈至控制系统;
[0037]
步骤二:控制系统控制机器人把运输小车内的解冻箱取出并将解冻后的物品原材料倒于焯水机内;
[0038]
步骤三:机器人将倒掉物品原材料的解冻箱放于洗筐机内,经清洗后解冻箱从洗筐机另一端出来进入往复式提升机内;
[0039]
步骤四:控制系统控制复式提升机将解冻箱输送至输送装置上,人工取下解冻箱后装满冷冻的物品原材料;
[0040]
步骤五:将装满冷冻物品原材料的解冻箱人工放置到称重滚筒输送机上称重,称重结果反馈记录至控制系统;
[0041]
步骤六:称重结果记录后,称重滚筒输送机与输送装置将装满冷冻物品原材料的解冻箱输送至机器人抓取的指定位置;
[0042]
步骤七:机器人将装满冷冻物品原材料的解冻箱抓取后放入运输小车内,当一辆运输小车装满后,移动换下一辆;
[0043]
步骤八:装满后的运输小车进行解冻操作,解冻后重复混合模式的步骤一;
[0044]
所述其他模式包括以下工作步骤:
[0045]
步骤一:将物品原材料放在解冻箱内,将装满冷冻物品原材料的解冻箱人工放置到称重滚筒输送机上称重,称重结果反馈记录至控制系统;
[0046]
步骤二:称重结果记录后,称重滚筒输送机与输送装置将装满冷冻物品原材料的解冻箱输送至机器人抓取的指定位置;
[0047]
步骤三:控制系统控制机器人把运输小车内的解冻箱取出并将解冻后的物品原材料倒于焯水机内;
[0048]
步骤四:机器人将倒掉物品原材料的解冻箱放于洗筐机内,经清洗后解冻箱从洗筐机另一端出来进入往复式提升机内;
[0049]
步骤五:控制系统控制复式提升机将解冻箱输送至输送装置上,人工将解冻箱取下装料,再重复其他模式的步骤一。
[0050]
与现有的技术相比,本发明的优点在于:
[0051]
1、本发明提供的工作系统应用于解冻库中后,可大大提高解冻库工作过程的自动化程度和生产效率高,减少了人工操作,从而降低了劳动强度。
[0052]
2、本发明具有装料模式、卸料模式、混合模式和其他模式等多种工作模式供选择,可根据实际情况的需要进行工作模式的选择,从而大大提高了生产效率。
[0053]
3、本发明的抓持组件结构简单,操作方便,同时抓持解冻箱的稳定性好。
[0054]
4、本发明使用前将小车按顺序编号,并在其中一个运输小车上设置首车检测片,通过首车检测片确定其中一个编号的运输小车的位置,从而进一步确定每一辆小车的位置,相比于现有技术中的寻找方法节约了人力。
[0055]
5、本发明在可利用定位组件对运输小车进行限位,以防止运输小车沿非运动方向摇摆,从而保证的运输过程的稳定性。
[0056]
6、本发明可利用集水组件及时将解冻后所产生的水收集至集水组件内,防止小车
运动过程中解冻后所产生的水洒落各处,保证了工作环境的清洁性。
[0057]
7、本发明的搁置件上设有倾斜设置的支撑面,使得装有冷冻物品的解冻箱在运输过程中也处于倾斜状态,这样便于解冻后所产生的水进行汇集和收集。
[0058]
8、本发明在小车框架顶部设有链条牵引件,底部设有导向件,并配合集水盘导轨,使得小车可在动力组件牵引下沿预定轨道进行移动和限位,提高了运输过程的自动化程度,降低了劳动强度和安全隐患。
附图说明
[0059]
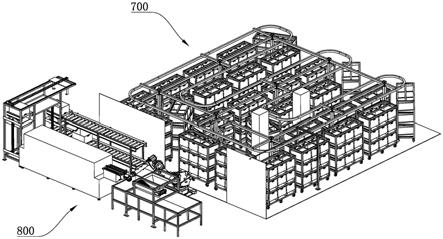
图1是本发明的结构示意图;
[0060]
图2是装卸料装置的结构示意图;
[0061]
图3是装卸料装置的工作原理框图;
[0062]
图4是焯水机的结构示意图;
[0063]
图5是抓持组件的结构示意图;
[0064]
图6是输送装置的结构示意图;
[0065]
图7是称重滚筒输送机的结构示意图;
[0066]
图8是解冻回转系统的结构示意图;
[0067]
图9是解冻回转系统部分结构的主视图;
[0068]
图10是定位组件的俯视图;
[0069]
图11是运输小车的结构示意图;
[0070]
图12是运输小车的左视图;
[0071]
图13是运输小车的主视图;
[0072]
图中:小车框架1、搁置件2、滚轮3、集水组件4、垫块5、链条牵引件6、导向件7、首车检测片8、机器人9、焯水机10、输送装置11、洗筐机12、往复式提升机13、称重滚筒输送机14、集水盘41、输水结构42、集水槽43、导水板44、集水盘导轨45、支撑面51、限位挡板52、滚动支撑体90、基座91、活动部92、抓持组件93、安装平台94、直线驱动结构95、夹持板96、拉钩97、限位板98、限位弯折99、运输小车100、焯水机机架101、焯水机主体102、焯水空腔103、开口104、漏斗105、输送链106、食品出料口107、安装框架111、第一输送线112、第二输送线113、停止挡块114、第一提升结构131、第二提升结构132、水平输送带133、转移夹爪134、机架141、输送辊142、驱动电机143、重量传感器144、定位组件200、第一定位轨道201、第二定位轨道202、空腔203、导向空腔204、限位空腔205、固定螺栓206、清洗间隙207、减速传感器208、停止传感器209、动力组件300、轨道301、支架302、解冻箱400、控制系统500、测距传感器600、解冻回转系统700、装卸料装置800。
具体实施方式
[0073]
下面结合附图和具体实施方式对本发明做进一步详细的说明。
[0074]
结合图1、图2和图8所示,一种回转式解冻库自动工作系统,包括解冻回转系统700和用于将解冻箱400装入或移出解冻回转系统700的装卸料装置800,所述解冻回转系统700包括若干个运输小车100和与运输小车100驱动连接的动力组件300,所述动力组件300包括首尾相连呈环形的轨道301和位于轨道301内的牵引链条,所述牵引链条沿轨道301移动并
驱动运输小车100;所述装卸料装置800包括可抓取解冻箱400的机器人9,还包括焯水机10、滚筒输送装置11、洗筐机12和用于转移运输解冻箱400的运输小车100,所述机器人9的一端可在焯水机10、滚筒输送装置11、洗筐机12和运输小车100之间转移,洗筐机12可选用现有技术中常用的洗筐机。所述洗筐机12设置在焯水机10的一侧,洗筐机12远离焯水机10的一端通过往复式提升机13与滚筒输送装置11相连通。
[0075]
本发明,使用时,内部装有物品的解冻箱400通过滚筒输送装置11输送,再利用机器人9将解冻箱400夹持转移至运输小车100内或之间转移至焯水机10上方,即卸料时,机器人9夹持的解冻箱400可以来自于运输小车100,也可以来自于滚筒输送装置11。解冻箱400位于焯水机10上方后,机器人9驱动解冻箱400使得解冻箱400逐渐倾斜直至翻转,解冻箱400的内容物掉入焯水机10内的水中,过水,空的解冻箱400由机器人9送入洗筐机12内进行清洗,清洗后,解冻箱400由洗筐机12的另一端转移至往复式提升机13,往复式提升机13将解冻箱400转移至滚筒输送装置11上,人工向滚筒输送装置11上的解冻箱400内装入待解冻物品,从而完成一个工作循环。运输小车100在动力组件300的驱动下沿轨道301移动并循环使用。故本发明提供的工作系统应用于解冻库中后,可大大提高解冻库工作过程的自动化程度和生产效率高,减少了人工操作,从而降低了劳动强度。
[0076]
结合图2和图4所示,所述焯水机10包括焯水机机架101和固定连接在焯水机机架101上的焯水机主体102,所述焯水机主体102内具有焯水空腔103,水盛放在焯水空腔103内,焯水空腔103连通有向上的开口104,以便于将解冻箱400内的物品通过开口104倾倒入焯水空腔103内,移动机器人9可使机器人9的一端位于开口104的上方。所述焯水机10还包括连接在焯水机机架101上的漏斗105,所述漏斗105的正下方设有输送链106,所述输送链106位于开口104的正上方,所述焯水机主体102的一端设有食品出料口107,所述输送链106的输送方向为远离食品出料口107的方向,移动机器人9可使机器人9的一端位于漏斗105的上方。这样物品在掉入焯水空腔103后再由食品出料口107转移出的过程所经历的路径较长,从而保证过水效果。
[0077]
使用时,机器人9的一端夹持着解冻箱400并移动至漏斗105上方,机器人9驱动解冻箱400使得解冻箱400逐渐倾斜直至翻转,解冻箱400的内容物掉入漏斗105,并通过漏斗105掉至输送链106上,输送链106对物品进行远离食品出料口107的方向运输,并最终脱离输送链106,物品在重力作用下掉入焯水空腔103内。
[0078]
结合图2和图5所示,所述机器人9包括固定设置在地面上的基座91和与基座91转动连接的活动部92,所述活动部92远离基座91的一端设有用于抓取解冻箱400的抓持组件93,移动抓持组件93可使抓持组件93压设在解冻箱400的外侧壁上。
[0079]
具体的说,所述抓持组件93包括连接在活动部92的安装平台94,所述安装平台94上设有直线驱动结构95,直线驱动结构95可以是现有技术中常用的实现直线驱动的具体结构,例如可以是气缸、油缸,也可以是丝杆和滑套的组合。夹持板96与直线驱动结构95驱动连接,所述夹持板96上表面凸出有两个拉钩97,驱动夹持板96可使解冻箱400位于两个拉钩97之间。所述安装平台94的两侧还各固定连接有一块限位板98,所述限位板98远离安装平台94的一端具有限位弯折99,所述限位弯折99与限位板98相垂直。限位弯折99在翻转解冻箱400时可对解冻箱400形成支撑限位,防止解冻箱400脱出抓持组件93。故本发明的抓持组件93结构简单,操作方便,同时抓持解冻箱400的稳定性好。
[0080]
机器人9在夹持目标解冻箱400时,先通过活动部92将抓持组件93转移至解冻箱400一端侧面,并使解冻箱400大致位于抓持组件93正中。此时,抓持组件93在竖直方向上的高度略低于解冻箱400,直线驱动结构95驱动夹持板96,使得夹持板96伸出至安装平台94外直至解冻箱400下方。活动部92带动抓持组件93整体向上移动,使得夹持板96与解冻箱400底面相贴合,此时解冻箱400正好位于两个拉钩97之间。直线驱动结构95驱动夹持板96,使得夹持板96复位,在拉钩97的带动下,解冻箱400被拉回至安装平台94内。
[0081]
优选地,所述抓持组件93还包括滑动连接的滑块和导向条,所述导向条固定连接在安装平台94上,所述滑块固定连接在夹持板96上。滑块和导向条的相互配合能对夹持板96滑动方向进行导向。
[0082]
如图4所示,所述安装平台94上还转动连接有滚动支撑体90,所述滚动支撑体90包括呈圆柱体的滚轴和/或呈球形的滚珠。这样在利用夹持板96将解冻箱400拉回至安装平台94内时解冻箱400所受到的为滚动摩擦力,大大降低了解冻箱400所受到的摩擦力大小。同时滚动支撑体90还可对解冻箱400提供支撑力。
[0083]
如图6所示,所述往复式提升机13包括位于洗筐机12一端且与洗筐机12相连通的第一提升结构131和位于滚筒输送装置11一端且与滚筒输送装置11相连通的第二提升结构132,所述第一提升结构131和第二提升结构132之间通过水平输送带133相连通,用于夹持解冻箱400的转移夹爪134与水平输送带133驱动连接。
[0084]
结合图6和图7所示,所述称重滚筒输送机14包括机架141,所述机架141上转动连接有若干根输送辊142,驱动电机143与输送辊142驱动连接,所述机架141上还设有重量传感器144,机架141的上表面设有光电传感器。光电传感器可感应是否有解冻箱400被放置在机架141上,重量传感器144可测量解冻箱400的总重量。
[0085]
如图6所示,所述滚筒输送装置11包括安装框架111,所述安装框架111上设有第一输送线112和第二输送线113,所述第一输送线112位于第二输送线113的上方,所述第一输送线112和第二输送线113的靠近往复式提升机13的一端均与往复式提升机13相连通,第一输送线112和第二输送线113远离往复式提升机13的一端均设有停止挡块114,移动位于第一输送线112或第二输送线113上的解冻箱400可使解冻箱400压设在停止挡块114上。
[0086]
使用时,洗筐机12一端的解冻箱400被转移夹爪134夹持,并依次通过第一提升结构131、水平输送带133和第二提升结构132转移至滚筒输送装置11的一端,启动驱动电机143驱动输送辊142转动,使得位于输送辊142上的解冻箱400转移至第一输送线112或第二输送线113上,经第一输送线112或第二输送线113输送直至压设在停止挡块114上停止运动。
[0087]
如图8所示,还包括感应器,感应器可以是现有技术中常用的传感器,移动运输小车100可使首车检测片8与感应器相互感应识别。优选地,首车检测片8设置在1号车上。这样感应器通过感应首车检测片8可确定1号车的位置(提前已将小车按顺序编号),从而进一步确定每一辆小车的位置。动力组件300中的牵引链条牵引运输小车100,由于轨道301对牵引链条的运动方向起到导向作用,故使得运输小车100也大致按照规定方向移动,轨道301呈环形,故运输小车100的运动轨迹也大致呈环形,从而确保循环使用。需要针对性的寻找某一运输小车100时,则通过感应器检测首车检测片8以确定首车位置,再依据编号寻找。故本发明使用前将运输小车100按顺序编号,并在其中一个运输小车100上设置首车检测片8,通
过首车检测8片确定其中一个编号的运输小车100的位置,从而进一步确定每一辆小车的位置,相比于现有技术中的寻找方法节约了人力。
[0088]
结合图8和图9所示,所述动力组件300还包括固定在地面上的支架302,所述轨道301固定连接在支架302上并位于运输小车100上方,所述运输小车100上端固定连接有链条牵引件6,所述牵引链条与链条牵引件6相连接。轨道301位于运输小车100上方相比于现有技术中设置在下方的方式,可有效避免轨道301以及位于轨道301内的牵引链条被解冻后的水沾湿污染。
[0089]
如图9所示,还包括可规整运输小车100运动方向的定位组件200,所述运输小车100沿与动力组件300提供的动力相垂直的方向运动可使运输小车100压设在定位组件200上。
[0090]
使用时,动力组件300提供一个驱动力驱动运输小车100运动,当运输小车100发生沿非运动方向的摇摆时,该摇摆必然存在一个与运动方向相垂直的分运动,故会使得运输小车100压设至定位组件200上,定位组件200对运输小车100提供一个作用力防止摆动幅度进一步增大。本发明可利用定位组件200对运输小车100进行限位,以防止运输小车100沿非运动方向摇摆,从而保证的运输过程的稳定性。
[0091]
结合图9和图10所示,所述定位组件200包括固定设置的第一定位轨道201和第二定位轨道202,所述第一定位轨道201和第二定位轨道202之间具有空腔203,所述运输小车100包括小车框架1和设置在小车框架1上的导向件7,移动小车框架1可使导向件7的一端延伸至空腔203内。即通过导向件7与分别位于导向件7两侧的第一定位轨道201和第二定位轨道202相互配合,实现限位。
[0092]
优选地,所述导向件7至少设有两个,且分别连接在小车框架1底面的两端上。这样能进一步保证运输小车100不会发生侧向摇摆。
[0093]
优选地,所述空腔203沿运输小车100的运动方向依次包括导向空腔204和限位空腔205,所述导向空腔204和限位空腔205相互连通,且导向空腔204的宽度由远离限位空腔205的一端向靠近限位空腔205的一端逐渐减小。为节约导轨铺设的成本,导轨可采用分段设置的方式。这样必然有导向件7端部滑入空腔203的这样一个过程。故在限位空腔205的前端设置导向空腔204可保证限位效果的同时,也便于导向件7的滑入。
[0094]
如图9所示,所述第一定位轨道201和第二定位轨道202均通过固定螺栓206固定设置在地面上,且第一定位轨道201和第二定位轨道202与底面之间均设有清洗间隙207。设置清洗间隙207即使得导向轨与地面之间存在缝隙,方便清理卫生。
[0095]
如图9所示,所述定位组件200还包括沿运输小车100的运动方向依次设置的减速传感器208和停止传感器209。再结合图4和图5所示,所述集水盘41两侧对称设置有集水盘导轨45,所述集水盘导轨45凸出集水盘41侧面。所述小车框架1上端固定连接有链条牵引件6,下端固定连接有导向件7。使用时,当减速传感器208检测到牵引链条,动力组件300进行减速,当停止传感器209检测到牵引链条时,即小车到达预定位置后,动力组件300停止驱动,使得运输小车100停在预定位置。故本发明通过链条牵引件6和导向件7,提高了运输过程的自动化程度,降低了劳动强度和安全隐患。本发明在小车框架1顶部设有链条牵引件6,底部设有导向件7,并配合集水盘导轨45,使得小车可在动力组件300牵引下沿预定轨道进行移动和限位。
[0096]
如图11所示,所述运输小车100还包括用于放置解冻物品的搁置件2,所述搁置件2连接在小车框架1上,所述小车框架1底部设有滚轮3,所述小车框架1上还设有集水组件4,所述集水组件4与搁置件2表面相连通。
[0097]
使用时,解冻物品盛放在解冻箱400内,并将解冻箱400放置在搁置件2上,驱动小车框架1以实现解冻箱400内解冻物品的移动。解冻箱400内的解冻物品解冻融化产生的水在运输过程中通过搁置件2或直接汇集至集水组件4内。故本发明可利用集水组件4及时将解冻后所产生的水收集至集水组件4内,防止小车运动过程中解冻后所产生的水洒落各处,保证了工作环境的清洁性。
[0098]
结合图11-13所示,所述集水组件4包括设置在小车框架1底部的集水盘41,至少一个输水结构42与集水盘41相连通,所述输水结构42与至少一个搁置件2相连通。解冻后产生的水,通过输水结构42汇集并收纳至集水盘41内,以防运输过程中洒落各处。其中,所述输水结构42为连接在小车框架1上且位于小车框架1一侧的输水槽,所述输水槽沿竖直方向延伸并依次与位于同一竖直位置的搁置件2相连通,输水槽底端位于集水盘41的上方。输水结构42也可以是输水管,或者是其他具体结构。
[0099]
优选地,所述输水槽与搁置件2之间还设有集水槽43,所述集水槽43位于搁置件2的一端且分别与搁置件2和输水槽相连通,集水槽43设有若干条且每条集水槽43相互平行,位于同一竖直高度的搁置件2对应同一条集水槽43,所述输水槽设有若干条且每条输水槽相互平行,每条集水槽43分别与若干条输水槽相连通,每条输水槽分别与若干条集水槽43相连通。即集水槽43和输水槽纵横交错构成网状结构,这样可在某一位置的解冻箱400出水量较大时将水流分散至不同的输水槽和集水槽43内,以缓解集水压力。
[0100]
如图11所示,所述集水盘41靠近输水槽的一侧固定连接有导水板44,所述导水板44向外倾斜设置,所述导水板44位于输水槽的正下方。这样便于将水引流至集水盘41内。
[0101]
如图11所示,所述搁置件2上表面固定设置有垫块5,所述垫块5上端包括用于支撑盛放解冻物品的解冻箱400的支撑面51,所述支撑面51在竖直方向上的高度由靠近集水组件4的一侧向远离集水组件4的一侧逐渐增大。即支撑面51倾斜设置,且靠近集水组件4一端的支撑面51位置较低。本发明的搁置件5上设有倾斜设置的支撑面51,使得装有冷冻物品的解冻箱400在运输过程中也处于倾斜状态,这样便于解冻后所产生的水进行汇集和收集,也便于后续的解冻操作步骤。
[0102]
优选地,所述支撑面51上表面凸出有限位挡板52。限位挡板52可对解冻箱400起到限位作用,防止在小车运输过程中解冻箱400出现大位移的摆动,从而保证稳定性。
[0103]
解冻回转系统700在使用时,解冻物品盛放在解冻箱400内,并将解冻箱400放置在支撑面51上,解冻箱400底面与支撑面51上表面贴合使得解冻箱400整体倾斜,动力组件300提供一个驱动力,牵引链条拉动链条牵引件6,从而驱动小车框架1以实现解冻箱400内解冻物品的移动。解冻箱400内的解冻物品解冻融化产生的水在运输过程中通过搁置件2或直接汇集至集水槽43内,并通过输水结构42汇集并收纳至集水盘41。当减速传感器208检测到牵引链条,动力组件300进行减速,当停止传感器209检测到牵引链条时,即小车到达预定位置后,动力组件300停止驱动,使得运输小车100停在预定位置。在运输过程中,运输小车100发生沿非运动方向的摇摆时,该摇摆必然存在一个与运动方向相垂直的分运动,故会使得导向件7压设至第一定位轨道201或第二定位轨道202上,第一定位轨道201或第二定位轨道
202对运输小车100提供一个作用力防止摆动幅度进一步增大。需要针对性的寻找某一运输小车100时,则通过感应器检测首车检测片8以确定首车位置,再依据编号寻找。故本发明使用前将运输小车100按顺序编号,并在其中一个运输小车100上设置首车检测片8,通过首车检测8片确定其中一个编号的运输小车100的位置,从而进一步确定每一辆小车的位置,相比于现有技术中的寻找方法节约了人力。
[0104]
结合图2和图3所示,所述装卸料装置800的工作方法包括只进行装料工作的装料模式、只进行卸料工作的卸料模式、同时进行装料工作和卸料工作的混合模式和针对无需进行解冻的物品的其他模式。故本发明具有装料模式、卸料模式、混合模式和其他模式等多种工作模式供选择,可根据实际情况的需要进行工作模式的选择,从而大大提高了生产效率。
[0105]
具体的说,所述装料模式包括以下工作步骤:
[0106]
步骤一:运输小车100移动至指定位置后,利用测距传感器600测量与运输小车100之间的距离,并将测量结果反馈至控制系统500;
[0107]
步骤二:控制系统500控制机器人9将空的解冻箱400从运输小车100内取出,放置在输送装置11上,解冻箱400经输送装置11输送至人工取箱处,人工取下解冻箱400后装满冷冻的物品原材料;
[0108]
步骤三:将装满冷冻物品原材料的解冻箱400人工放置到称重滚筒输送机14上称重,称重结果反馈记录至控制系统500;
[0109]
步骤四:称重结果记录后,称重滚筒输送机14与输送装置11将装满冷冻物品原材料的解冻箱400输送至机器人9抓取的指定位置;
[0110]
步骤五:机器人9将装满冷冻物品原材料的解冻箱400抓取后放入运输小车100内,当一辆运输小车100装满后,移动换下一辆,直至装料结束。
[0111]
所述卸料模式包括以下工作步骤:
[0112]
步骤一:解冻完成后,将运输小车100移动至指定位置,利用测距传感器600测量与运输小车100之间的距离,并将测量结果反馈至控制系统500;
[0113]
步骤二:控制系统500控制机器人9把运输小车100内的解冻箱400取出并将解冻后的物品原材料倒于焯水机10内;
[0114]
步骤三:机器人9将倒掉物品原材料的解冻箱400放于洗筐机12内,其中,洗筐机12可选用现有技术中常用的洗筐机,经清洗后解冻箱400从洗筐机12另一端出来进入往复式提升机13内;
[0115]
步骤四:控制系统500控制复式提升机13将解冻箱400输送至输送装置11上,经输送装置11输送至机器人9指定的空箱抓取位置;
[0116]
步骤五:机器人9将空的解冻箱400抓取放置于运输小车100内,当装有物品原料的解冻箱400取出完且清洗后的解冻箱400都已放进运输小车100后,运输小车100移动换下一辆运输小车100,直至卸料结束。
[0117]
所述混合模式包括以下工作步骤:
[0118]
步骤一:解冻完成后,将运输小车100移动至指定位置,利用测距传感器600测量与运输小车100之间的距离,并将测量结果反馈至控制系统500;
[0119]
步骤二:控制系统500控制机器人9把运输小车100内的解冻箱400取出并将解冻后
的物品原材料倒于焯水机10内;
[0120]
步骤三:机器人9将倒掉物品原材料的解冻箱400放于洗筐机12内,经清洗后解冻箱400从洗筐机12另一端出来进入往复式提升机13内;
[0121]
步骤四:控制系统500控制复式提升机13将解冻箱400输送至输送装置11上,人工取下解冻箱400后装满冷冻的物品原材料;
[0122]
步骤五:将装满冷冻物品原材料的解冻箱400人工放置到称重滚筒输送机14上称重,称重结果反馈记录至控制系统500;
[0123]
步骤六:称重结果记录后,称重滚筒输送机14与输送装置11将装满冷冻物品原材料的解冻箱400输送至机器人9抓取的指定位置;
[0124]
步骤七:机器人9将装满冷冻物品原材料的解冻箱400抓取后放入运输小车100内,当一辆运输小车100装满后,移动换下一辆;
[0125]
步骤八:装满后的运输小车100进行解冻操作,解冻后重复混合模式的步骤一。
[0126]
所述其他模式包括以下工作步骤:
[0127]
步骤一:将物品原材料放在解冻箱400内,将装满冷冻物品原材料的解冻箱400人工放置到称重滚筒输送机14上称重,称重结果反馈记录至控制系统500;
[0128]
步骤二:称重结果记录后,称重滚筒输送机14与输送装置11将装满冷冻物品原材料的解冻箱400输送至机器人9抓取的指定位置;
[0129]
步骤三:控制系统500控制机器人9把运输小车100内的解冻箱400取出并将解冻后的物品原材料倒于焯水机10内;
[0130]
步骤四:机器人9将倒掉物品原材料的解冻箱400放于洗筐机12内,经清洗后解冻箱400从洗筐机12另一端出来进入往复式提升机13内;
[0131]
步骤五:控制系统500控制复式提升机13将解冻箱400输送至输送装置11上,人工将解冻箱400取下装料,再重复其他模式的步骤一。
[0132]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
[0133]
尽管本文较多地使用了小车框架1、搁置件2、滚轮3、集水组件4、垫块5、链条牵引件6、导向件7、首车检测片8、机器人9、焯水机10、输送装置11、洗筐机12、往复式提升机13、称重滚筒输送机14、集水盘41、输水结构42、集水槽43、导水板44、集水盘导轨45、支撑面51、限位挡板52、滚动支撑体90、基座91、活动部92、抓持组件93、安装平台94、直线驱动结构95、夹持板96、拉钩97、限位板98、限位弯折99、运输小车100、焯水机机架101、焯水机主体102、焯水空腔103、开口104、漏斗105、输送链106、食品出料口107、安装框架111、第一输送线112、第二输送线113、停止挡块114、第一提升结构131、第二提升结构132、水平输送带133、转移夹爪134、机架141、输送辊142、驱动电机143、重量传感器144、定位组件200、第一定位轨道201、第二定位轨道202、空腔203、导向空腔204、限位空腔205、固定螺栓206、清洗间隙207、减速传感器208、停止传感器209、动力组件300、轨道301、支架302、解冻箱400、控制系统500、测距传感器600、解冻回转系统700、装卸料装置800等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1