集装箱自动开关门设备及其开门方法及其关门方法与流程
1.本发明涉及智能设备,尤其涉及集装箱自动开关门设备及其开门方法及其关门方法。
背景技术:
2.集装箱技术自诞生之日到今天,开关门锁都采用人力进行,当集装箱沿长度方向立起后,装入松散物料(如:煤炭、粮食、肥料、轻质颗粒物等)时,集装箱的门处高处(如6.058m),为了装满集装箱必须在高处去打开集装箱的门锁,装满货物后又要快速关上门和锁。此时,靠人力去完成此项工作费时费力,也不安全。
技术实现要素:
3.本发明提供了集装箱自动开关门设备及其开门方法及其关门方法,其克服了背景技术中集装箱人工开关门所存在的不足。
4.本发明解决其技术问题的所采用的技术方案之一是:集装箱自动开关门设备,包括:
5.机架机构(2);
6.开关门机构(3),包括第一安装架(31)、第一弧形轨道(32)、第一拐臂(33)、第一驱动机构(34)和旋转梁(35),该第一安装架(31)装设在机架机构(2)上,该第一弧形轨道(32)固设在第一安装架(31)上,该第一拐臂(33)一端铰接在第一安装架(31)上,另一端适配滑接在第一弧形轨道(32),该第一驱动机构(34)一端铰接在第一安装架(31),另一端铰接在第一拐臂(33)中部,该旋转梁(35)固接在第一拐臂(33)上,通过第一驱动机构(34)伸缩以带动第一拐臂(33)转动及带动旋转梁(35)弧线运动;及
7.第一锁接机构(4),装接在旋转梁(15)上且能锁接集装箱(1)箱门(11)上的锁轴(12)或松开上述锁接。
8.一实施例之中:该第一弧形轨道(32)之轴线和箱门(11)之转动轴线重合。
9.一实施例之中:该旋转梁(35)上固设有第一固座(36),该第一锁接机构(4)包括铰接在第一固座(36)的抓钩(41)及第二驱动机构(42),该第二驱动机构(42)一端铰接在第一固座(36),另一端铰接在抓钩(41),通过第二驱动机构(42)伸缩以带动抓钩(41)转动以钩接锁轴(12)或松开上述钩接。
10.一实施例之中:还包括:
11.开关锁机构(5),包括第二安装架(51)、第二弧形轨道(52)、第二拐臂(53)、第三驱动机构(54)和旋转架(55),该第二安装架(51)固设在旋转梁(35)上,该第二弧形轨道(52)固设在第二安装架(51)上,该第二拐臂(53)一端铰接在第二安装架(51)上,另一端适配滑接在第二弧形轨道(52),该第三驱动机构(54)一端铰接在第二安装架(51),另一端转动连接在第二拐臂(53)中部,通过第三驱动机构(54)伸缩以带动第二拐臂(53)转动及带动旋转架(55)弧线运动;
12.第二锁接机构(6),装接在旋转架(55)上且能锁接集装箱(1)箱门(11)上的锁杆(13)或松开上述锁接。
13.一实施例之中:该第二弧形轨道(52)之轴线和锁轴(12)之转动轴线重合。
14.一实施例之中:该第二锁接机构(6)包括一第四驱动机构(61)、一第一滑轨(62)、一滑块(63)、一第五驱动机构(64)、两夹臂(65)和两连杆(66),该第四驱动机构(61)装接在旋转架(55)上且传动连接第一滑轨(62)以能带动第一滑轨(62)滑动,该滑块(63)滑接在第一滑轨(62)上,该第五驱动机构(64)装接在第一滑轨(62)且传动连接滑块(63)以带动滑块(63)沿第一滑轨(62)滑动,该两夹臂(65)一端铰接在第一滑轨(62),该两连杆(66)一端都铰接在滑块(62),另一端分别铰接在两夹臂(65)中部,以通过滑块(63)滑动带动两夹臂(65)夹住锁杆(13)或松开上述夹住。
15.一实施例之中:该第二锁接机构(6)还包括第二滑轨(67),该第二滑轨(67)固设在旋转架(55)上,该第一滑轨(62)滑接在第二滑轨(67),该第一滑轨(62)和第二滑轨(67)垂直布置。
16.一实施例之中:还包括:
17.锁盖开合机构(7),包括第三安装架(71)、转盘(72)、开启叉(73)和第六驱动机构(74),该第三安装架(71)固装在第二安装架(51),该转盘(72)转动连接在第三安装架(71)上,该第六驱动机构(74)固设在转盘(72)偏心位置,该第六驱动机构(74)传动连接开启叉(73),该开启叉(63)末端凹设有能适配叉接在锁盖(14)的叉体结构,通过第六驱动机构(74)带动开启叉(73)活动以能叉接在锁盖(14)上,通过转盘(72)转动以带动锁盖(14)相对箱门(11)上的支座(15)转动。
18.一实施例之中:该锁盖(14)转动轴线和转盘(72)转动轴线重合。
19.一实施例之中:该锁盖开合机构(7)包括第七驱动机构(75),该转盘(72)外设轮齿以形成齿轮,该第七驱动机构(75)装设在第三安装架(71)上且固设有齿条,该齿条啮合齿轮以通过第七驱动机构(75)伸缩带动转盘(72)转动。
20.一实施例之中:该机架机构(2)包括一机架(21)、一能沿第一方向滑接在机架(21)上的第三滑轨(22)和一能沿第二方向滑接在第三滑轨(22)上的第四滑轨(23),该第一安装架(31)能沿第三方向滑接在第四滑轨(23)上,该第一方向、第二方向和第三方向互相垂直布置;另配设第八驱动机构(24)、第九驱动机构(25)和第十驱动机构(26),该第八驱动机构(24)装设在机架(21)且传动连接第三滑轨(22),该第九驱动机构(25)装设在第三滑轨(22)且传动连接第四滑轨(23),该第十驱动机构(26)装设在第四滑轨(23)且传动连接第一安装架(31)。
21.一实施例之中:该机架机构(2)包括一机架(21)、一能沿第一方向滑接在机架(21)上的第三滑轨(22)、一能沿第二方向滑接在第三滑轨(22)上的第四滑轨(23)和支撑架(27),该支撑架(27)能沿第三方向滑接在第四滑轨(23)上,该第一方向、第二方向和第三方向互相垂直布置;该支撑架(27)设有第三弧形轨道(28),该第一安装架(31)上固设有活动座,该活动座适配连接在第三弧形轨道(28)以通过活动座活动控制第一安装架(31)旋转;另配设第八驱动机构(24)、第九驱动机构(25)和第十驱动机构(26),该第八驱动机构(24)装设在机架(21)且传动连接第三滑轨(22),该第九驱动机构(25)装设在第三滑轨(22)且传动连接第四滑轨(23),该第十驱动机构(26)装设在第四滑轨(23)且传动连接第一安装架
(31)。
22.本发明解决其技术问题的所采用的技术方案之二是:上述的集装箱自动开关门设备的开门方法,包括:
23.步骤11,锁盖打开步骤,驱动开启叉(73)活动以使开启叉(73)叉体结构叉接锁盖(14),转盘(72)转动以带动锁盖(14)转动,解除锁盖(14)对锁杆(13)的锁接;
24.步骤12,锁杆打开步骤,滑块(63)移动以驱动两夹臂(65)夹住锁杆(13),第四驱动机构(61)带动第一滑轨(62)移动以从支座(15)中推出锁杆(13),解除支座(15)对锁杆(13)的锁接;
25.步骤13,锁杆转动步骤,第三驱动机构(54)带动第二拐臂(53)转动,以带动旋转架(55)弧线运动,从而带动锁杆(13)转动以解除锁轴(12)与集装箱(1)的锁接;
26.步骤14,锁接锁轴步骤,第一锁接机构(4)锁接集装箱(1)箱门(11)上的锁轴(12);及
27.步骤15,打开箱门步骤,第一驱动机构(34)带动第一拐臂(33)转动,从而带动箱门(11)转动以打开。
28.本发明解决其技术问题的所采用的技术方案之三是:上述的集装箱自动开关门设备的关门方法,包括:
29.步骤21,关闭箱门步骤,第一驱动机构(34)带动第一拐臂(33)转动,以带动旋转梁(35)弧线运动,从而带动箱门(11)转动以关闭;
30.步骤22,锁杆转动步骤,第三驱动机构(54)带动第二拐臂(53)转动,以带动旋转架(55)弧线运动,从而带动锁杆(13)转动以驱动锁轴(12)转动实现锁轴(12)与集装箱(1)的锁接;
31.步骤23,锁杆关闭步骤,带动第一滑轨(62)移动以将锁杆(13)推入支座(15)中,实现支座(15)对锁杆(13)的锁接,滑块(63)复位以驱动两夹臂(65)松开夹住;
32.步骤24,锁盖关闭步骤,驱动转盘(72)转动以带动锁盖(14)转动,实现锁盖(14)对锁杆(13)的锁接,驱动开启叉(73)复位;
33.步骤25,锁轴解锁步骤,第一锁接机构(4)松开对锁轴(12)的解锁。
34.本技术方案与背景技术相比,它具有如下优点:
35.第一锁接机构锁接箱门的锁轴,第一驱动机构伸缩以带动第一拐臂转动及带动旋转梁弧线运动,带动箱门转动以打开箱门或关闭,实现箱门自动开关,替代人工开关,工作效率高、安全可靠、实用简单、成本低廉。
36.第一弧形轨道轴线和箱门转动轴线重合,提高箱门开关的准确性和可靠性。
37.第一锁接机构包括抓钩及第二驱动机构,通过第二驱动机构伸缩以带动抓钩转动以钩接锁轴或松开上述钩接,操作方便,结构简单。
38.第二锁接机构能锁接箱门上的锁杆,通过第三驱动机构伸缩以带动第二拐臂转动及带动旋转架弧线运动,带动锁杆转动以驱动锁轴插入箱体的插孔内或从插孔中拔出,能实现自动解锁或关锁,工作效率高、安全可靠、实用简单、成本低廉。
39.第二弧形轨道轴线和锁轴转动轴线重合,提高解锁和关锁的准确性和可靠性。
40.通过滑块滑动带动两夹臂夹住锁杆,通过第一滑轨滑动将锁杆推入支座或从支座中推出锁杆,工作效率高、安全可靠、实用简单、成本低廉。
41.通过第六驱动机构带动开启叉活动以能叉接在锁盖上,通过转盘转动以带动锁盖相对箱门上的支座转动,以控制锁盖对锁杆的锁接或解锁,工作效率高、安全可靠、实用简单、成本低廉。
42.锁盖转动轴线和转盘转动轴线重合,提高锁盖开锁和关锁的准确性和可靠性。
43.第七驱动机构固设有齿条,齿条啮合齿轮以通过第七驱动机构伸缩带动转盘转动,结构简单。
附图说明
44.下面结合附图和具体实施方式对本发明作进一步说明。
45.图1是具体实施方式的集装箱的立体结构示意图。
46.图2是图1的局部放大示意图。
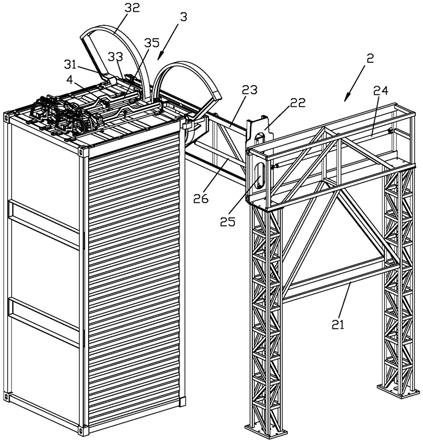
47.图3是具体实施方式的集装箱自动开关门设备及集装箱的立体结构示意图。
48.图4是图3的局部放大示意图。
49.图5是具体实施方式的开关门机构的立体结构示意图。
50.图6是具体实施方式的开关锁机构的立体结构示意图。
51.图7是图6的局部放大示意图。
52.图8是具体实施方式的第二锁接机构的立体结构示意图。
53.图9是具体实施方式的锁盖开合机构的立体结构示意图。
54.图10是具体实施方式的机架机构的机架的立体结构示意图。
55.图11是具体实施方式的机架机构的第三、第四滑轨的立体结构示意图。
具体实施方式
56.请查阅图1和图2,该集装箱1结构为现有技术,它包括箱体和能转动连接在箱体的箱门11,通过箱门11转动以关闭或打开箱体箱口。该箱门11上活动连接有锁轴12,该箱体上设有插孔,通过锁轴12转动能带动锁轴12沿轴向滑动以能插入插孔内实现箱门11和箱体的锁接,或,拔出插孔实现锁接的解锁。该锁轴12上固接有锁轴支座16,该锁轴支座16上摆动连接有锁杆13,以通过锁杆13既能相对锁轴支座16左右摆动,又能带动锁轴支座16及锁轴12一起上下摆动以控制箱门11和箱体的锁接。该箱门11上固设有锁杆支座15,通过锁杆13左右摆动以能将锁杆13卡入锁杆支座15内,限制锁杆13上下摆动;该锁杆支座15上转动连接有能在锁接位置和解锁位置间转动的锁盖14,位于锁接位置的锁盖14锁靠在锁杆13上以能限制锁杆13左右、上下摆动,位于解锁位置的锁盖14避开锁靠位置使锁杆13能左右摆动至锁杆能上下摆动的位置。
57.请查阅图3和图11,集装箱自动开关门设备,包括机架机构2、开关门机构3、第一锁接机构4、开关锁机构5、第二锁接机构6和锁盖开合机构7。
58.该开关门机构3包括第一安装架31、第一弧形轨道32、第一拐臂33、第一驱动机构34和旋转梁35,该第一安装架31装设在机架机构2上,该第一弧形轨道32固设在第一安装架31上,该第一弧形轨道32之轴线和箱门11之转动轴线重合,该第一拐臂33一端铰接在第一安装架31上,另一端装设有滚轮,该第一拐臂33的滚轮适配滑接在第一弧形轨道32,该第一驱动机构34一端铰接在第一安装架31,另一端铰接在第一拐臂33中部,该旋转梁35固接在
第一拐臂33之靠近另一端的部分,该第一驱动机构34如液压缸或气压缸机构(下述驱动机构如都可采用液压缸或气压缸机),通过第一驱动机构34伸缩以带动第一拐臂33转动,通过第一拐臂33转动带动旋转梁35弧线运动。该第一锁接机构4装接在旋转梁15上且能锁接集装箱1箱门11上的锁轴12或松开上述锁接,具体结构中:该旋转梁35上固设有第一固座36,该第一锁接机构4包括中部铰接在第一固座36的抓钩41及第二驱动机构42,该第二驱动机构42一端铰接在第一固座36,另一端铰接在抓钩41的末端,通过第二驱动机构42伸缩以带动抓钩41转动以钩接锁轴12或松开上述钩接。该第一锁接机构4的抓钩41钩接锁轴12,该第一拐臂33转动以带动旋转梁35弧线运动,带动箱门11打开或关闭。
59.该开关锁机构5包括第二安装架51、第二弧形轨道52、第二拐臂53、第三驱动机构54和旋转架55,该第二安装架51固设在旋转梁35上,该第二弧形轨道52固设在第二安装架51上,该第二弧形轨道52之轴线和锁轴12之转动轴线重合,该第二拐臂53一端铰接在第二安装架51上,另一端装接有滚轮,该滚轮适配滑接在第二弧形轨道52,该第三驱动机构54一端铰接在第二安装架51,另一端转动连接在第二拐臂53中部,通过第三驱动机构54伸缩以带动第二拐臂53转动及带动旋转架55弧线运动。该第二锁接机构6装接在旋转架55上且能锁接锁杆13或松开上述锁接,具体结构中:该第二锁接机构6包括一第四驱动机构61、一第一滑轨62、一滑块63、一第五驱动机构64、两夹臂65、两连杆66和一第二滑轨67,该第二滑轨67固设在旋转架55上,该第一滑轨62滑接在第二滑轨67,该第四驱动机构61装接在旋转架55上且传动连接第一滑轨62以能带动第一滑轨62滑动,该滑块63滑接在第一滑轨62上,该第五驱动机构64装接在第一滑轨62且传动连接滑块63以带动滑块63沿第一滑轨62滑动,该两夹臂65一端铰接在第一滑轨62,该两连杆66一端都铰接在滑块62,另一端分别铰接在两夹臂65中部,以通过滑块63滑动带动两夹臂65夹住锁杆13或松开上述夹住;该第一滑轨62如竖直布置,该第二滑轨67水平布置布置。该滑块63滑动带动两夹臂65夹住锁杆13,该第一滑轨62水平移动以将锁杆13从锁座支座15中推至能上下摆动的位置,该第二拐臂52转动以带动旋转架55弧线运动,带动锁杆13和锁轴12上下摆动,以从插孔中拔出锁轴12实现箱门和箱体的解锁。
60.该锁盖开合机构7包括第三安装架71、转盘72、开启叉73和第六驱动机构74,该第三安装架71固装在第二安装架51,该转盘72转动连接在第三安装架71上,该转盘72转动轴线和锁盖14转动轴线重合,该第六驱动机构74固设在转盘72偏心位置,该第六驱动机构74传动连接开启叉73,该开启叉63末端凹设有能适配叉接在锁盖14的叉体结构,通过第六驱动机构74带动开启叉73活动以能叉接在锁盖14上,通过转盘72转动以带动锁盖14相对箱门11上的支座15转动;而且,该锁盖开合机构7包括第七驱动机构75,该转盘72外设轮齿以形成齿轮,该第七驱动机构75装设在第三安装架71上且固设有齿条,该齿条啮合齿轮以通过第七驱动机构75伸缩带动转盘72转动。
61.该机架机构2包括一机架21、一能沿横向方向滑接在机架21上的第三滑轨22和一能沿上下方向滑接在第三滑轨22上的第四滑轨23,该第一安装架31设滚轮,该滚轮能沿纵向方向滑接在第四滑轨23上,另配设第八驱动机构24、第九驱动机构25和第十驱动机构26,该第八驱动机构24装设在机架21且传动连接第三滑轨22,该第九驱动机构25装设在第三滑轨22且传动连接第四滑轨23,该第十驱动机构26装设在第四滑轨23且传动连接第一安装架31。根据需要,还包括支撑架27,该支撑架27能沿纵向方向滑接在第四滑轨23上,该支撑架
27设有第三弧形轨道28,该第一安装架31上固设有活动座,该活动座适配连接在第三弧形轨道28以通过活动座活动控制第一安装架31旋转,通过该结构能使本设备不仅能打开关闭竖直置放的集装箱,也能打开关闭倾斜布置的集装箱,如45
°
、60
°
、75
°
布置的集装箱。
62.上述的集装箱自动开关门设备的开门方法,包括:
63.步骤10,通过第八驱动机构24、第九驱动机构25和第十驱动机构26以控制第一安装架31活动至准确位置;
64.步骤11,锁盖打开步骤,第六驱动机构74驱动开启叉73活动以使开启叉73叉体结构叉接锁盖14,第七驱动机构75驱动转盘72转动以带动锁盖14逆时针转动195
°
,解除锁盖14对锁杆13的锁接,此时锁杆13能左右摆动;
65.步骤12,锁杆打开步骤,第五驱动机构64驱动滑块63缩回以驱动两夹臂65夹住锁杆13,第四驱动机构61带动第一滑轨62移动以从支座15中使锁杆13左右摆动0―20
°
,即从支座15中推出锁杆13,解除支座15对锁杆13的锁接,使锁杆13能上下摆动;
66.步骤13,锁杆转动步骤,第三驱动机构54带动第二拐臂53转动,以带动旋转架55弧线运动,从而带动锁杆13转动90
°
以驱动锁轴12从箱体的插孔中拔出,解除锁轴12与集装箱1的锁接,解除箱门与箱体的锁接;
67.步骤14,锁接锁轴步骤,第二驱动机构42驱动抓钩41转动以使抓钩41钩接锁轴12;及
68.步骤15,打开箱门步骤,第一驱动机构34带动第一拐臂33转动,以带动旋转梁35弧线运动,从而带动箱门11转动135
°
以打开。
69.上述的集装箱自动开关门设备的关门方法,包括:
70.步骤21,关闭箱门步骤,第一驱动机构34带动第一拐臂33转动,以带动旋转梁35弧线运动,从而带动箱门11转动以关闭;根据需要,如左箱门被右箱门上的压板所压,则应先关左箱门后关右箱门,先打开右箱门后打开左箱门。
71.步骤22,锁杆转动步骤,第三驱动机构54带动第二拐臂53转动,以带动旋转架55弧线运动,从而带动锁杆13转动以驱动锁轴12转动90
°
实现锁轴12插入箱体的插孔内,锁接箱门与集装箱1;
72.步骤23,锁杆关闭步骤,第四驱动机构61带动第一滑轨62移动以将锁杆13推入支座15中,实现支座15对锁杆13的锁接,滑块63复位以驱动两夹臂65松开夹住;
73.步骤24,锁盖关闭步骤,第四驱动机构61驱动转盘72转动以带动锁盖14转动,实现锁盖14对锁杆13的锁接,第五驱动机构64驱动开启叉73复位以使叉体结构脱离锁盖14;
74.步骤25,锁轴解锁步骤,第一锁接机构4松开对锁轴12的解锁;
75.通过第八驱动机构24、第九驱动机构25和第十驱动机构26以控制第一安装架31复位。
76.实现箱门全自动开关,替代人工开关,工作效率高、安全可靠、实用简单、成本低廉。
77.根据需要,还可设置光电传感器、plc和电磁多路换向阀,通过光电传感器、plc、电磁多路换向阀和驱动机构的配合以自动打开或关闭箱门。
78.根据需要,集装箱自动开关门设备能装设移动设备如叉车上。
79.以上所述,仅为本发明较佳实施例而已,故不能依此限定本发明实施的范围,即依
本发明专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1