一种全自动托盘包装机的制作方法
1.本发明涉及托盘包装机领域,尤其涉及一种全自动托盘包装机。
背景技术:
2.托盘是一种用于放置产品的装置,用于产品的中转,以防止产品的损伤。现有技术中,手机的3c零件产品在生产完成后一般放置在托盘内,并将多个放有产品的托盘叠放在一起形成托盘叠;手机的3c零件产品在进行售卖、输送时,通常需将装有产品的托盘叠放入至包装袋内,并进行封口操作。然而,现在技术中,托盘叠的装袋、封口过程一般是通过人工进行的,无法实现托盘装袋、封口过程的自动化,导致生产效率低。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本发明的目的是克服现有技术的不足,提供一种全自动托盘包装机,无法实现托盘叠装袋、封口过程的自动化,导致生产效率较低的问题。
5.本发明的技术方案如下:一种全自动托盘包装机,包括:机架、设置在所述机架上的送袋机构、进料输送机构、出料输送机构、设置在所述进料输送机构和出料输送机构之间的开袋机构、封袋机构;所述送袋机构用于从包装袋放置位上吸取包装袋,并将包装袋输送至所述开袋机构和出料输送机构上,且包装袋的袋口端放置在所述开袋机构上;所述开袋机构包括:夹袋组件、设置在所述夹袋组件一侧的开袋组件,所述开袋组件用于打开包装袋的袋口,所述夹袋组件用于在包装袋的袋口打开后伸入至包装袋内并撑住包装袋的袋口;所述进料输送机构用于将托盘叠输送至开袋机构的一侧并将托盘叠推入至包装袋内;所述出料输送机构用于将装有托盘叠的包装袋输送至封袋机构的一侧,并在包装袋完成封口后将其输送至出料输送机构的出料端;所述封袋机构用于将装有托盘叠的包装袋内抽真空,并将该包装袋封口。
6.进一步地,所述的一种全自动托盘包装机,还包括:用于放置空托盘的托盘放置机构、用于从所述托盘放置机构上抓取空托盘的托盘抓取机构、贴标机构。
7.进一步地,所述进料输送机构包括:第一皮带输送线、设置在所述第一皮带输送线上的第一推料机构、第二推料机构,所述第一推料机构与所述第二推料机构结构相同;所述第一推料机构包括:第一旋转驱动装置、与所述第一旋转驱动装置输出端连接的第一同步传动组件、与所述第一同步传动组件连接的移动板、设置在所述移动板上的两推板、第一滑轨、设置在所述第一滑轨上的第一滑块,所述移动板与所述第一滑块连接;所述移动板上还设置有用于调整两所述的推板之间距离的宽度调节组件;所述出料输送机构包括第二皮带输送线。
8.进一步地,所述夹袋组件包括:第一固定板、安装在所述第一固定板上的第一直线驱动装置、与所述第一直线驱动装置输出端连接的第二固定板、安装在所述第二固定板上的第二直线驱动装置、与所述第二直线驱动装置输出端连接的升降平台、设置在所述升降
平台外侧的两夹取驱动装置、与所述夹取驱动装置输出端连接的两夹取板,所述夹取驱动装置用于驱动两夹取板相互靠近或相互远离。
9.进一步地,所述开袋组件包括:下开袋组件、设置在所述下开袋组件上侧的上开袋组件,所述下开袋组件包括:设置在所述进料输送机构与出料输送机构之间的吸附平台、设置在所述吸附平台上的下真空吸嘴;所述上开袋组件包括:第一安装板、安装在所述第一安装板上的第三直线驱动装置、与所述第三直线驱动装置输出端第二安装板、安装于所述第二安装板上的第四直线驱动装置、与所述第四直线驱动装置输出端连接的安装架、安装于所述安装架上的若干上真空吸嘴。
10.进一步地,所述封袋机构包括:下固定座、设置在所述下固定座上的第五直线驱动装置、与所述第五直线驱动装置输出端连接的定位板、上固定座、设置在所述上固定座上的第六直线驱动装置、与所述第六直线驱动装置输出端连接的第三安装板、安装在所述第三安装板上的第七直线驱动装置和第八直线驱动装置、与所述第七直线驱动装置输出端连接的封口刀、与所述第八直线驱动装置输出端连接的抽真空位、设置在所述封口刀与抽真空位之间的切口刀。
11.进一步地,所述送袋机构包括:固定架、设置在所述固定架上的第二旋转驱动装置、与所述第二旋转驱动装置输出端连接的第二同步传动组件、第二滑轨、设置在所述第二滑轨上的第二滑块、安装在所述第二滑块上移动架、安装在所述移动架上的第九直线驱动装置、与所述第九直线驱动装置输出端连接的第一真空吸附组件,所述第二滑块与所述第二同步传动组件连接。
12.进一步地,所述托盘放置机构包括:第一支撑架、安装在所述第一支撑架上的第一线性模组、与所述第一线性模组输出端连接的放料板、安装在所述第一支撑架上的两校正组件,所述两校正组件设置在放料板的两侧,所述放料板用于放置空托盘,所述校正组件用于调整空托盘位于放料板上的位置。
13.进一步地,所述托盘抓取机构还用于将抓取的空托盘输送至进料输送机构的正上方,并将空托盘盖在进料输送机构上的托盘叠上,所述托盘抓取机构包括:第二支撑架、安装在所述第二支撑架上的第二线性模组、与所述第二线性模组输出端连接的第三线性模组、安装于所述第三线性模组的输出端上的第二真空吸附组件。
14.进一步地,所述贴标机构包括:第三支撑架、安装在所述第三支撑架上的第四线性模组、与所述第四线性模组输出端连接的第五线性模组、安装于所述第五线性模组输出端上的标签吸附板和整平组件,所述整平组件用于将包装袋的贴标面整平。
15.采用上述方案,本发明提供一种全自动托盘包装机,具有以下有益效果:通过进料输送机构与开袋机构相配合,实现托盘叠的自动装袋过程,通过封袋机构实现包装袋的自动封口,无需人工进行装袋、封口操作,实现托盘叠包装的全自动化,有效提高生产效率。
附图说明
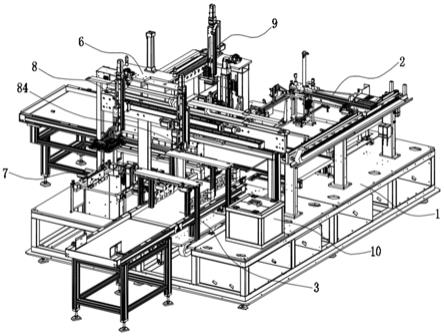
16.图1为本发明的结构示意图;
17.图2为本发明另一角度的结构示意图;
18.图3为本发明的进料输送机构的结构示意图;
19.图4为本发明的第一推料机构的结构示意图;
20.图5为本发明的开袋机构的结构示意图;
21.图6为本发明的夹袋组件、下开袋组件的结构示意图;
22.图7为本发明的上开袋机构的结构示意图;
23.图8为本发明的封袋机构的结构示意图;
24.图9为本发明的封袋机构的另一角度的结构示意图;
25.图10为本发明的送袋机构的结构示意图;
26.图11为本发明的托盘放置机构、托盘抓取机构、压紧机构的结构示意图;
27.图12为本发明的贴标机构的结构示意图。
28.其中:机架1、干燥剂上料机构10、送袋机构2、固定架20、第二旋转驱动装置21、第三同步轮220、第四同步轮221、第二同步带222、第二滑轨23、第二滑块24、移动架25、第九直线驱动装置26、第一真空吸附组件27、包装袋放置位28、进料输送机构3、第一皮带输送线30、第一推料机构31、第一旋转驱动装置310、第一同步轮3110、第二同步轮3111、第一同步带3112、移动板312、推板313、第一滑轨314、第一滑块315、第三旋转驱动装置3160、丝杆3161、第三滑轨3162、第三滑块3163、第二推料机构32、出料输送机构4、开袋机构5、夹袋组件50、第一固定板500、第一直线驱动装置501、第二固定板502、第二直线驱动装置503、升降平台504、夹取驱动装置505、夹取板506、第四滑轨507、第四滑块508、下开袋组件51、吸附平台510、下真空吸嘴511、上开袋组件52、第一安装板520、第三直线驱动装置521、第二安装板522、第四直线驱动装置523、安装架524、上真空吸嘴525、第五滑轨526、第五滑块527、封袋机构6、下固定座60、第五直线驱动装置600、定位板61、上固定座62、第六直线驱动装置620、第六滑轨621、第六滑块622、第三安装板63、第七直线驱动装置630、第八直线驱动装置631、封口刀632、抽真空位633、切口刀634、托盘放置机构7、第一支撑架70、第一线性模组71、放料板72、第十直线驱动装置73、校正板74、第七滑轨75、第七滑块76、托盘抓取机构8、第二支撑架80、第二线性模组81、第三线性模组82、第二真空吸附组件83、压紧机构84、第六线性模组840、第七线性模组841、压紧板842、贴标机构9、第三支撑架90、第四线性模组91、第五线性模组92、标签吸附板93、第十一直线驱动装置94、滚轮95。
具体实施方式
29.以下结合附图和具体实施例,对本发明进行详细说明。
30.请参照图1
‑
图12,本发明提供一种全自动托盘包装机,包括:机架1、设置在所述机架1上的送袋机构2、进料输送机构3、出料输送机构4、设置在所述进料输送机构3和出料输送机构4之间的开袋机构5、封袋机构6、托盘放置机构7、托盘抓取机构8、贴标机构9;所述送袋机构2用于从包装袋放置位28上吸取包装袋,并将包装袋输送至所述开袋机构5和出料输送机构4上,且包装袋的袋口端放置在所述开袋机构5上;所述托盘放置机构7用于放置空托盘,所述托盘抓取机构8用于从所述托盘放置机构7上抓取空托盘,所述托盘抓取机构8还用于将抓取的空托盘输送至进料输送机构3的正上方,并将空托盘盖在进料输送机构3上的托盘叠上,所述开袋机构5包括:夹袋组件50、设置在所述夹袋组件50一侧的开袋组件,所述开袋组件用于打开包装袋的袋口,所述夹袋组件50用于在包装袋的袋口打开后伸入至包装袋内并撑住包装袋的袋口;所述进料输送机构3用于将托盘叠输送至开袋机构5的一侧并将托盘叠推入至包装袋内;所述出料输送机构4用于将装有托盘叠的包装袋输送至封袋机构6的
一侧,并在包装袋完成封口后将其输送至出料输送机构4的出料端;所述贴标机构9用于给装有托盘叠的包装袋贴标签;所述封袋机构6用于将装有托盘叠的包装袋内抽真空,并将该包装袋封口;具体地,在本实施例中,所述进料输送机构3的一侧还设置有干燥剂上料机构10,所述干燥剂上料机构10用于在空托盘盖在托盘叠上后,将干燥剂放置在空托盘上,具体可根据所包装的产品决定是否设置干燥剂上料机构10;干燥剂上料机构10包括:振动盘、从振动盘上抓取干燥剂的抓手(附图中未示出),该抓手可进行x、y、z三向移动,具体可根据实际生产需求设计干燥剂上料机构的结构;需要说明的是,送袋机构2将包装袋输送至开袋机构5和出料输送机构4上时,包装袋位于开袋机构5和出料输送机构4上的位置是根据包装袋、托盘叠的大小决定的,需保证托盘叠放入至包装袋后,托盘叠完全位于出料输送机构4上,包装袋的袋口端(包括后期需切除的部分)则位于所述开袋机构5上。
31.本发明中的一种全自动托盘包装机的具体作用过程为:将托盘叠放置在进料输送机构3上,若需要盖空托盘,进料输送机构3则带动托盘叠移动至盖空托盘位(预设的盖空托盘时,托盘叠所处的位置),托盘抓取机构8从托盘放置机构7上抓取空托盘,并将空托盘盖在托盘叠上,若需要放置干燥剂,则通过干燥剂上料机构10将干燥剂放置在空托盘上,于此同时,送袋机构2抓取包装袋,将包装袋输送至开袋机构5和出料输送机构4上,保证包装袋的袋口一端朝向进料输送机构3,开袋机构5启动,在开袋组件的作用下打开包装袋的袋口,在袋口打开后夹袋组件50伸入至包装袋内,支撑住包装袋,保证包装袋撑开,包装袋打开后,进料输送机构3进一步带动托盘叠移动至包装袋一侧并将托盘叠推入至包装袋内,完成托盘叠的装袋过程,完成装袋后,由出料输送机构4将装有托盘叠的包装袋输送至封袋机构6与贴标机构9之间,若需要贴标签,则由贴标机构9在包装袋上进行贴标操作,完成贴标操作后,由封袋机构6将包装袋内抽真空,并进行热切封口操作,此外若包装袋的封口一端长度较长,需要进行切袋操作时,封袋机构6可将多余部分切掉,完成托盘叠的自动装袋、封袋操作,整个过程无需人工参与,均通过本发明中的一种全自动托盘包装机实现,有效提高托盘叠的保证效率。
32.具体地,在本实施例中,所述进料输送机构3包括:第一皮带输送线30、设置在所述第一皮带输送线30上的第一推料机构31、第二推料机构32,所述第一推料机构31与所述第二推料机构32结构相同;所述第一推料机构31包括:第一旋转驱动装置310、与所述第一旋转驱动装置310输出端连接的第一同步传动组件、与所述第一同步传动组件连接的移动板312、设置在所述移动板312上的两推板313、第一滑轨314、设置在所述第一滑轨314上的第一滑块315,所述移动板312与所述第一滑块315连接;所述移动板312上还设置有用于调整两所述的推板313之间距离的宽度调节组件;所述第一推料机构31用于调整托盘叠位于第一皮带输送线30上的位置,使其达到预设的盖空托盘位,并在盖空托盘过程中夹紧托盘叠,防止其移动;所述第二推料机构32用于将托盘叠推入至包装袋内;所述出料输送机构4包括第二皮带输送线;具体地,在本实施例中,所述第一同步传动组件包括:与所述第一旋转驱动装置310输出端连接的第一同步轮3110、第二同步轮3111、套在所述第一同步轮3110和第二同步轮3111上的第一同步带3112;所述宽度调节组件包括:安装在所述移动板312上的第三旋转驱动装置3160、与所述第三旋转驱动装置3160输出端连接的丝杆3161、安装在所述移动板312上的第三滑轨3162、设置在所述第三滑轨3162上的两第三滑块3163,所述的两推板313套在所述丝杆3161上,所述的两推板313分别与所述的两第三滑块3163连接;需要说
明的是,所述丝杆3161上设置有轴套,推板313套在轴套上,两轴套上均设置有外螺纹,且两轴套上的外螺纹的方向相反,两推板313与轴套的连接处设置有内螺纹,且方向相反,使得丝杆3161转动时,两推板313可以朝相互靠近一侧移动,也可朝相互远离一侧移动,以适用不同的尺寸的托盘叠;所述进料输送机构3的具体作用过程为:将托盘叠放置在第一皮带输送线30上,启动第一皮带输送线30,将托盘叠输送至盖空托盘位,启动第一推料机构31,第一推料机构31的两推板313夹持柱托盘叠,对托盘叠进行盖空托盘、放置干燥剂操作,完成上述操作后,第一推料机构31送开盖有空托盘的托盘叠,在第一皮带输送线30的作用下,盖有空托盘的托盘叠移动至开袋机构5的一侧,第二推料机构32的两推板313夹持住托盘叠,在第一旋转驱动装置310、第一同步传动组件等的作用下,带动托盘叠移动,将其推入至包装袋内,快速完成托盘叠的装袋过程。
33.具体地,在本实施例中,所述夹袋组件50包括:第一固定板500、安装在所述第一固定板500上的第一直线驱动装置501、与所述第一直线驱动装置501输出端连接的第二固定板502、安装在所述第二固定板502上的第二直线驱动装置503、与所述第二直线驱动装置503输出端连接的升降平台504、设置在所述升降平台504外侧的两夹取驱动装置505、与所述夹取驱动装置505输出端连接的两夹取板506,所述夹取驱动装置505用于驱动两夹取板506相互靠近或相互远离;具体地,在本实施例中门锁上夹取驱动装置505为手指气缸;所述开袋组件包括:下开袋组件51、设置在所述下开袋组件51上侧的上开袋组件52,所述下开袋组件51包括:设置在所述进料输送机构3与出料输送机构4之间的吸附平台510、设置在所述吸附平台510上的下真空吸嘴511;所述上开袋组件52包括:第一安装板520、安装在所述第一安装板520上的第三直线驱动装置521、与所述第三直线驱动装置521输出端第二安装板522、安装于所述第二安装板522上的第四直线驱动装置523、与所述第四直线驱动装置523输出端连接的安装架524、安装于所述安装架524上的若干上真空吸嘴525;具体地,在本实施例中,所述第一固定板500上设置有第四滑轨507、所述第四滑轨507上设置有第四滑块508,所述第四滑块508与所述第二固定板502连接;所述第一安装板520上设置有第五滑轨526、所述第五滑轨526上设置有第五滑块527,所述第二安装板522与所述第五滑块527连接;所述开袋机构5的作用过程为:包装袋由送袋机构2输送至下开袋组件51的吸附平台510上,开启下真空吸嘴511,下真空吸嘴511吸附住包装袋的下层,在第四直线驱动装置523的作用下,驱动安装架524、上真空吸嘴525向下移动,上真空吸嘴525吸附住包装袋的上层,进一步由第四直线驱动装置523驱动安装架524、上真空吸嘴525向上移动,带动包装袋的上层上移,包装袋的袋口打开,此时启动第一直线驱动装置501,驱动第一固定板500、第二固定板502、夹取驱动装置505、夹取板506等向靠近吸附平台510一侧移动,使得夹取板506伸入至包装袋内,此时启动夹取驱动装置505,驱动两夹取板506向相互远离一侧移动,两夹取板506撑住包装袋的袋口,从而实现包装袋的自动开袋操作。
34.具体地,在本实施例中,所述封袋机构6包括:下固定座60、设置在所述下固定座60上的第五直线驱动装置600、与所述第五直线驱动装置600输出端连接的定位板61、上固定座62、设置在所述上固定座62上的第六直线驱动装置620、与所述第六直线驱动装置620输出端连接的第三安装板63、安装在所述第三安装板63上的第七直线驱动装置630和第八直线驱动装置631、与所述第七直线驱动装置630输出端连接的封口刀632、与所述第八直线驱动装置631输出端连接的抽真空位633、设置在所述封口刀632与抽真空位633之间的切口刀
634;具体地,在本实施例中,所述上固定座62上设置有第六滑轨621、所述第六滑轨621上设置有第六滑块622,所述第三安装板63与所述第六滑块622连接;所述封口刀632为热压刀,外接加热装置对热压刀进行加热操作,热压刀用于包装袋的袋口的热压封口;所述切口刀634用于切除包装袋袋口前端多余部分,抽真空位633外接抽真空装置,例如风机等,用于将包装袋内抽真空;所述封袋机构6的具体作用过程为:通过出料输送机构4将装有托盘叠的包装袋输送至封袋机构6的一侧,袋口部分伸入至压紧板84261上,第六直线驱动装置620驱动第三安装板63、封口刀632、抽真空位633等整体下移,到达指定高度后,第八直线驱动装置631驱动抽真空位633下移,抽真空位633将包装袋内抽真空,第七直线驱动装置630驱动封口刀632下压,进行热压封口,完成封口,第七直线驱动装置630、第八直线驱动装置631分别带动封口刀632、抽真空位633复位,若封口后,袋口部分较长,第六直线驱动装置620进一步带动整体下移,切口刀634与定位板61配合,切掉袋口多余的部分,完成包装袋的封口操作。
35.具体地,在本实施例中,所述送袋机构2包括:固定架20、设置在所述固定架20上的第二旋转驱动装置21、与所述第二旋转驱动装置21输出端连接的第二同步传动组件、第二滑轨23、设置在所述第二滑轨23上的第二滑块24、安装在所述第二滑块24上移动架25、安装在所述移动架25上的第九直线驱动装置26、与所述第九直线驱动装置26输出端连接的第一真空吸附组件27,所述第二滑块24与所述第二同步传动组件连接;具体地,在本实施例中,所述第二同步传动组件包括:与所述第二旋转驱动装置21输出端连接的第三同步轮220、第四同步轮221、套在所述第三同步轮220和第四同步轮221上的第二同步带222;所述第一真空吸附组件27包括:支架、设置在所述支架上的若干真空吸盘;送袋机构2的具体作用过程为:启动第二旋转驱动装置21,在第二同步传动组件、第二滑轨23、第二滑块24的作用下,带动移动架25、第九直线驱动装置26、第一真空吸附组件27移动至包装袋放置位28的正上方,启动第九直线驱动装置26,带动第一真空吸附组件27下移,第一真空吸附组件27吸附住包装袋放置位28上的包装袋,在第二旋转驱动装置21、第二同步传动组件、第二滑轨23、第二滑块24等的作用下,带动第一真空吸附组件27移动至开袋机构5、出料输送机构4的上方,在第九直线驱动装置26的作用下,带动第一真空吸附组件27向靠近吸附平台510一侧移动,将包装袋放置在吸附平台510、出料输送机构4上,完成包装袋的自动输送。
36.具体地,在本实施例中,所述托盘放置机构7包括:第一支撑架70、安装在所述第一支撑架70上的第一线性模组71、与所述第一线性模组71输出端连接的放料板72、安装在所述第一支撑架70上的两校正组件,所述两校正组件设置在放料板72的两侧,所述放料板72用于放置空托盘,所述校正组件用于调整空托盘位于放料板72上的位置;所述托盘抓取机构8包括:第二支撑架80、安装在所述第二支撑架80上的第二线性模组81、与所述第二线性模组81输出端连接的第三线性模组82、安装于所述第三线性模组82的输出端上的第二真空吸附组件83;所述第二真空吸附组件83包括:支撑架、设置在所述支撑架上的若干真空吸盘;所述第一线性模组71用于驱动放料板72上下移动,放料板72上放置有若干空托盘;所述校正机构包括:第十直线驱动装置73、与所述第十直线驱动装置73输出端连接的校正板74、设置在所述第一支撑架70上的第七滑轨75、设置在所述第七滑轨75上的第七滑块76,所述校正板74与第七滑轨75连接,当空托盘在放料板72上的位置存在偏移时,即未达到托盘抓取机构8的抓取位置时,启动第十直线驱动装置73,带动校正板74移动,实现空托盘位于放
料板72上位置的调整;在托盘叠上放置空托盘主要用于保护托盘叠内的产品,一方面,防止打包完成后,搬运过程中对产品产生的损伤,另一方面,防止灰尘进入托盘叠内,对产品产生污染。
37.具体地,在本实施例中,所述进料输送机构3的上侧还设置有一压紧机构84,所述压紧机构84用于在空托盘盖在托盘叠上后,向下按压空托盘,使得空托盘与托盘叠紧密连接;所述压紧机构84包括:安装在所述第二支撑架80上的第六线性模组840、设置在所述第六线性模组840输出端上的第七线性模组841、设置在在所述第七线性模组841输送端上的压紧板842,在第七线性模组841的作用下,驱动压紧板842下移,压紧空托盘与托盘叠,使其紧密连接。
38.具体地,在本实施例中,所述贴标机构9包括:第三支撑架90、安装在所述第三支撑架90上的第四线性模组91、与所述第四线性模组91输出端连接的第五线性模组92、安装于所述第五线性模组92输出端上的标签吸附板93和整平组件,所述整平组件用于将包装袋的贴标面整平;具体地,在本实施例中,所述整平组件包括:安装在所述第五线性模组92输送端上的第十一直线驱动装置94、与所述第十一直线驱动装置94输出端连接的滚轮95,在第四线性模组91、第五线性模组92、第十一直线驱动装置94的作用下,驱动滚轮95在包装袋表面滚动,从而将包装袋表面铺平;所述标签吸附板93采用真空吸附的方式吸取标签;在包装袋表面铺平后,标签吸附板93吸附标签,并将标签贴在包装袋上,为保证包装袋上的标签贴合的较紧,在标签贴完后,可通过整平组件的滚轮95进行按压,保证贴标质量。
39.具体地,在本实施例中,所述第一旋转驱动装置310、第二旋转驱动装置21、第三旋转驱动装置3160均为伺服电机,所述第一直线驱动装置501、第二直线驱动装置503、第三直线驱动装置521、第四直线驱动装置523、第五直线驱动装置600、第六直线驱动装置620、第七直线驱动装置630、第八直线驱动装置631、第九直线驱动装置26、第十直线驱动装置73、第十一直线驱动装置94均为驱动气缸。
40.综上所述,本发明提供一种全自动托盘包装机,具有以下有益效果:通过进料输送机构与开袋机构相配合,实现托盘叠的自动装袋过程,通过封袋机构实现包装袋的自动封口,无需人工进行装袋、封口操作,实现托盘叠的包装全自动化,有效提高生产效率。
41.以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1