一种垃圾储坑中的移料方法与流程
1.本发明属于垃圾吊装技术领域,具体涉及一种垃圾储坑中的移料方法。
背景技术:
2.城市生活垃圾在厂外由城市环卫系统负责收集,用密闭式垃圾压缩运输车运送入厂内。垃圾车经汽车衡自动称重并由计算机记录和存储数据后,通过高架引桥进入综合主厂房卸料平台,通过垃圾卸料门将垃圾卸入垃圾坑内储存。垃圾储坑内的垃圾通过吊装机构进行堆料、倒垛和取料送至焚烧炉的垃圾料斗中。
3.垃圾储坑内垃圾表面高低不一,对于取料焚烧时的吊装工作较为不便,且在平移过程中较易发生碰撞事故,因此需要利用抓斗对垃圾进行定期取料移位,从而使垃圾储坑内的垃圾表面保持一致高度。
技术实现要素:
4.本发明的目的是根据上述现有技术的不足之处,提供一种垃圾储坑中的移料方法,该移料方法通过对垃圾储坑内垃圾表面进行激光三维扫描从而获取高位部分和低位部分,从而利用抓斗根据预设的移料逻辑原理来进行自动的垃圾移料。
5.本发明目的实现由以下技术方案完成:一种垃圾储坑中的移料方法,其特征在于所述移料方法包括以下步骤:(1)利用三维激光扫描装置对整个垃圾储坑进行扫描,以在bim软件中构建垃圾储坑的三维模型;(2)将所述三维激光扫描装置对所述垃圾储坑内的垃圾表面的所有激光测点进行求和计算后,再根据所述激光测点数量计算出所述垃圾储坑内的垃圾平均高度h;(3)对各所述激光测点进行筛分处理,筛选出高出垃圾平均高度h至少30%或以上的所述激光测点并标记为高位激光测点,将相邻聚集在一起且直径达到1.5m或以上的所述高位激光测点圈定为待处理点集;筛选出低于垃圾平均高度h至少30%或以上的所述激光测点并标记为低位激光测点,将相邻聚集在一起且直径达到1.5m或以上的所述低位激光测点圈定为待填平点集;(4)依次利用所述抓斗对所述待处理点集处的垃圾进行吊装并移运至距离最近的所述待填平点集位置处的垃圾中进行填平;(5)待完成第一批次的移料填平作业后,重复步骤(1)
‑
(2),之后再次对所述激光测点进行筛分处理,筛选出高出垃圾平均高度h至少20%或以上的所述激光测点并标记为第二高位激光测点,将相邻聚集在一起且直径达到1.5m或以上的所述第二高位激光测点圈定为第二待处理点集;筛选出低于垃圾平均高度h至少20%或以上的所述激光测点并标记为第二低位激光测点,将相邻聚集在一起且直径达到1.5m或以上的所述第二低位激光测点圈定为第二待填平点集;(6)依次利用所述抓斗对所述第二待处理点集处的垃圾进行吊装并移运至距离最
近的所述第二待填平点集位置处的垃圾中进行填平;(7)如此往复,直至所述垃圾储坑中各处垃圾与垃圾平均高度h之间的高低差异幅度≤10%为止。
6.在步骤(4)或步骤(6)中,每次对所述待处理点集或所述第二待处理点集处的垃圾进行吊装移运时,所述抓斗抓取所在位置处高于垃圾平均高度h 10%以上部分的垃圾。
7.所述抓斗在抓取垃圾且上提的过程中,利用所述抓斗的各爪瓣中所设置的挤压装置对垃圾进行挤压以去除水份。
8.所述挤压装置包括一竖杆,所述竖杆的下端铰接设置有至少四块钢板,各所述钢板内侧中部分别铰接设置有一支撑杆,所述支撑杆的一端同所述钢板内侧中部相铰接、另一端同所述竖杆上的套环相铰接,所述套环与一伸缩杆相固定连接并由所述伸缩杆驱动进行竖直方向上的移动,在所述抓斗抓取垃圾且上提的过程中,所述伸缩杆驱动所述套环沿所述竖杆向下移动以展开所述钢板,对所抓取的垃圾产生挤压作用,去除垃圾中的水份。
9.所述挤压装置包括一柔性腔体以及与所述柔性腔体相连通的空压机,在所述抓斗抓取垃圾且上提的过程中,所述空压机持续向所述柔性腔体充气使其膨胀以对所抓取的垃圾产生挤压作用,去除垃圾中的水份。
10.本发明的优点是:利用三维激光扫描方式对垃圾储坑进行扫描以获得三维模型,并通过激光测点的筛分算法,以获得垃圾储坑内待处理点集和待填平点集,实现抓斗自动化对垃圾储坑移料填平作业,自动化程度高。
附图说明
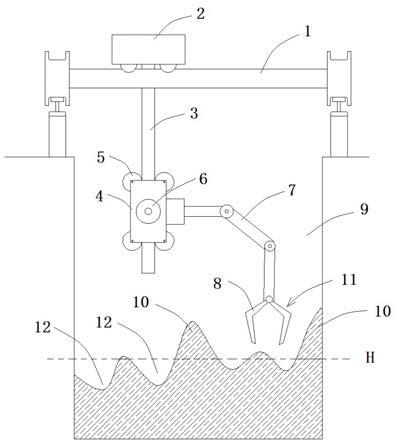
11.图1为本发明中在垃圾储坑中移料方法的原理示意图;图2为本发明中采用柔性腔体作为挤压装置的抓斗局部示意图;图3为本发明中采用支撑骨架作为挤压装置的抓斗局部示意图。
具体实施方式
12.以下结合附图通过实施例对本发明的特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:如图1
‑
3,图中各标记分别为:龙门架1、平移机构2、竖向轨道3、竖向移动机构4、滚轮5、电机 6、机械臂7、爪瓣8、垃圾储坑9、待处理点集10、抓斗11、待填平点集12、空压机13、柔性腔体14、伸缩杆15、支撑杆16、套环17、竖杆18、钢板19。
13.实施例:如图1所示,本实施例具体涉及一种垃圾储坑中的移料方法,该移料方法主要包括以下步骤:(1)利用安装在垃圾储坑9侧墙上的三维激光扫描装置对整个垃圾储坑9进行扫描,并在bim软件内构建垃圾储坑9的三维模型;其中:三维激光扫描装置,基于2d激光雷达+1r旋转云台,构建3d测量系统,3d测量系统安装在垃圾仓上方墙面,与现有起重机系统独立运行。依据垃圾仓尺寸合理选用3d测量系统的个数,经过数据拼接,得到整个垃圾仓的三维激光点云数据,测量精度
±
15mm。
14.(2)将三维激光扫描装置对垃圾储坑9内的垃圾表面的所有激光测点进行求和计算后,再根据激光测点数量计算出垃圾储坑9内的垃圾平均高度h,如图1所示的虚线,该垃
圾平均高度h可作后续的参考线使用。
15.(3)利用专门开发的算法系统,对各激光测点进行筛分处理,筛选出高出垃圾平均高度h至少30%或以上的激光测点并将其标记为高位激光测点,对上述高位激光测点进行进一步的分析,将聚集在一起且聚集分布范围直径达到1.5m或以上的高位激光测点圈定为待处理点集10,也就是呈谷峰状的垃圾堆垛;同时,筛选出低于垃圾平均高度h至少30%或以上的激光测点并标记为低位激光测点,对上述低位激光测点进行进一步的分析,将聚集在一起且聚集分布范围直径达到1.5m或以上的低位激光测点圈定为待填平点集12,也就是呈谷底状的垃圾凹坑。
16.(4)启动起重机系统,利用抓斗11对待处理点集10处的垃圾进行吊装并移运至距离最近的待填平点集12位置处进行填平,上述起重机的操作由系统根据算法自动控制完成,吊装依据就近原则实施。
17.如图1所示,本实施例中的起重机系统包括龙门架1、运行于龙门架1上的平移机构2以及设置在平移机构2下方的抓斗11,龙门架1架设在垃圾储坑9的上方两侧并可沿垃圾储坑9的纵向移动走行,平移机构2为一滑行小车用以在龙门架1的横向轨道上实现水平向的横移,通过平移机构2和龙门架1的组合使用,可实现在垃圾储坑9上的平面移动走行。在此基础上,在平移机构2的下方还固定设置有一具有一定长度的竖向轨道3,抓斗11的多自由度机械臂7经竖向移动机构4可滑动式装配在竖向轨道3上,从而进一步实现抓斗11在竖直方向上的自由移动。竖向移动机构4上的四个滚轮5同竖向轨道3紧密配合,在电机6的驱动下可在竖向轨道3上实现竖向自由移动。
18.在抓斗11上提的过程中,在抓斗11的各爪瓣8内还设置有一挤压装置用以挤压去除垃圾中的水分,提高垃圾的焚烧效率,并提升垃圾的密度,挤压装置可以采用以下两种形式中的任一一种:如图2所示,挤压装置由空压机13以及柔性腔体14组成,两者相互连通,柔性腔体14在初始状态下为最小体积,在抓斗11抓取垃圾且上提的过程中,空压机13持续向柔性腔体14中充气以使其膨胀,从而对所抓取的垃圾产生挤压作用,将其中所夹杂的水分去除,除了提高垃圾的焚烧效率之外,还进一步提高垃圾的密度。
19.如图3所示,挤压装置包括固定在机械臂7下端面上的竖杆18,竖杆18的下端铰接设置有至少四块钢板19,钢板19可以呈平面或者是弧面状,钢板19的下端同竖杆18下端铰接、中部同一支撑杆16铰接,支撑杆16的下端同钢板19中部铰接连接、上端同套设在竖杆18上的套环17铰接连接,套环17可在竖杆18上自由上下移动且由伸缩杆15驱动,在初始状态下,伸缩杆15处于最小形成,各钢板19贴合在竖杆18上形成最小体积;在抓斗11上提的过程中,伸缩杆15向下伸展逐渐至最大形成,套环17在其驱动下逐渐使各钢板19向外展开,从而使各块钢板19向外挤压外侧的垃圾,将其中所夹杂的水分去除。
20.(5)待完成第一批次的移料填平作业后,重复步骤(1)
‑
(2),之后再次对激光测点进行筛分处理,筛选出高出垃圾平均高度h至少20%或以上的激光测点并标记为第二高位激光测点,将相邻聚集在一起且直径达到1.5m或以上的第二高位激光测点圈定为第二待处理点集;筛选出低于垃圾平均高度h至少20%或以上的激光测点并标记为第二低位激光测点,将相邻聚集在一起且直径达到1.5m或以上的第二低位激光测点圈定为第二待填平点集;(6)依次利用抓斗对第二待处理点集处的垃圾进行吊装并移运至距离最近的第二
待填平点集位置处的垃圾中进行填平;上述起重机的操作由系统根据算法自动控制完成,吊装依据就近原则实施。
21.(7)如此往复,直至垃圾储坑9中各处垃圾与垃圾平均高度h之间的高低差异幅度≤10%为止。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1