一种物料车牵引装置以及牵引移动机器人系统的制作方法
[0001]
本实用新型属于自动搬运技术领域,更具体地,涉及一种物料车牵引装置以及牵引移动机器人系统。
背景技术:
[0002]
目前,物料车是工厂常用的用于物料转运的设备,通常使用人工将物料车推动至目标地点,自动化程度低、劳动强度大,需要较多人力资源才能满足生产运输要求,效率急需进一步提高。因此,急需开发一种物料车牵引装置以及牵引移动机器人系统,用于实现对物料车的牵引,以解决上述技术问题。
[0003]
有鉴于此,特提出本实用新型。
技术实现要素:
[0004]
针对现有技术中存在的问题,本实用新型的目的是提供一种物料车牵引装置,一种物料车牵引装置,其特征在于:包括第一牵引装置和第二牵引装置;所述第一牵引装置包括牵引公头,所述第一牵引装置安装在物料车上;所述第二牵引装置包括结构主体、牵引母头,所述牵引母头安装在所述结构主体上,所述结构主体安装在移动机器人上;
[0005]
所述牵引母头结构为u型,所述牵引公头为一型,所述牵引公头和所述牵引母头均设置有插孔;
[0006]
所述第二牵引装置还包括球头锁紧销,所述牵引母头和所述牵引公头相接后,通过所述球头锁紧销锁紧。
[0007]
进一步地,所述第一牵引装置还包括特征识别装置,所述特征识别装置设置为左、右对称布置。
[0008]
进一步地,所述特征识别装置设置互相垂直的特征识别面。
[0009]
进一步地,所述特征识别装置设置矩形孔。
[0010]
进一步地,所述牵引公头插孔直径比所述球头锁紧销直径大,所述牵引母头插孔直径与所述球头锁紧销直径一致。
[0011]
进一步地,所述插孔设置1个或多个。
[0012]
进一步地,所述结构主体设置加强筋。
[0013]
进一步地,所述结构主体包括t型结构、l型结构,所述t型结构和所述l型结构相连,所述牵引母头安装在所述t型结构上,所述l型结构安装在移动机器人上。
[0014]
一种牵引移动机器人系统,其特征在于:包括如上所述的一种物料车牵引装置及移动机器人,所述移动机器人通过所述物料车牵引装置牵引物料车。
[0015]
进一步地,所述移动机器人通过所述物料车简易牵引装置的特征识别装置识别物料车的位姿,所述移动机器人移动至对接位置,使所述物料车牵引装置的牵引公头和牵引母头相接。
[0016]
本实用新型提供的一种物料车牵引装置,具有如下有益效果:
[0017]
(1)本实用新型设置的牵引公头、牵引母头,便于快速对接和锁紧;
[0018]
(2)本实用新型设置左、右对称布置的特征识别装置,便于机器人识别物料车位置,进行对接。
附图说明
[0019]
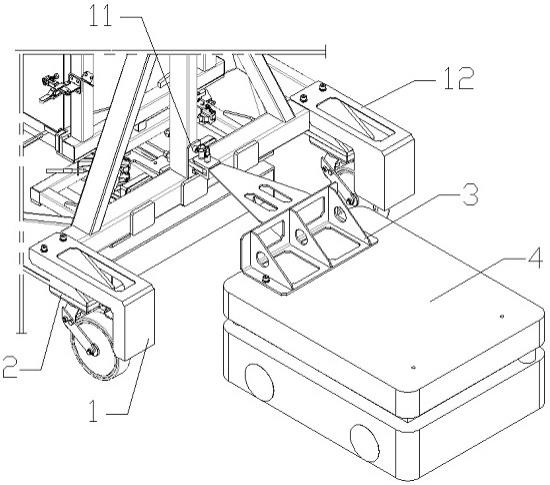
图1为本实用新型的一种物料车牵引装置以及牵引移动机器人系统的结构示意图;
[0020]
图2为本实用新型的第一牵引装置的结构示意图;
[0021]
图3为本实用新型的第二牵引装置的结构示意图;
[0022]
图4为本实用新型的第二牵引装置的牵引母头结构示意图;
[0023]
图5为本实用新型的第一牵引装置的的特征识别装置结构示意图;
[0024]
图中:1.第一牵引装置、11.牵引公头、12. 特征识别装置、121.矩形孔、122.特征识别面、2.物料车、3.第二牵引装置、31.结构主体、311. 牵引母头、312. 加强筋、313.减重孔、32.球头锁紧销、4.移动机器人。
具体实施方式
[0025]
下面结合具体实施例和附图对本实用新型做进一步说明,以助于理解本实用新型的内容。
[0026]
如图1、2、3、4、5所示,一种物料车牵引装置,包括第一牵引装置1和第二牵引装置3;所述第一牵引装置包括特征识别装置12、牵引公头11,所述特征识别装置12、牵引公头11安装在所述物料车2上;所述第二牵引装置3包括结构主体31、牵引母头311、加强筋312、球头锁紧销32,所述牵引母头311安装在所述结构主体上31,所述结构主体上31安装在移动机器人4上,通过所述球头锁紧销32连接所述牵引公头11与所述牵引母头311。
[0027]
进一步地,所述特征识别装置12设置为左、右对称布置,特征识别装置12设置两个,固接在物料车2结构上,每个特征识别装置12设置互相垂直的两个面做为特征识别面122,用于移动机器人4通过特征识别面122识别到物料车2的位姿,从而进行定位;所述特征识别装置12设置矩形孔121,以方便物料车2的脚轮固定拉环的操作。
[0028]
进一步地,所述牵引公头11设置前、后布置的插孔,所述牵引公头11插孔直径比所述球头锁紧销32直径更大。
[0029]
进一步地,所述牵引母头311设置前、后布置的插孔,所述牵引母头311插孔间距与所述牵引公头11插孔间距一致,所述牵引母头311插孔直径与所述球头锁紧销32直径一致。
[0030]
进一步地,所述牵引母头311结构为u型,所述牵引公头11结构为一型,当所述牵引母头311的插孔与牵引公头11的插孔对中后,便于对接时将所述球头锁紧销32插入并锁紧。
[0031]
进一步地,所述结构主体31由t型结构、l型结构组成,设置对称布置的加强筋312,以加强结构;根据实际应用的需求,可以在结构主体31设置减重孔313,以减轻所述结构主体31的重量。
[0032]
一种牵引移动机器人系统,包括如上所述的一种物料车牵引装置及移动机器人4,所述移动机器人4通过所述特征识别装置12识别所述物料车2的位姿,从而使牵引母头311与牵引公头11的插孔相对,通过插入球头锁紧销32插入插孔中进行锁紧。
[0033]
在具体实施例中,插孔可以设置1个或多个,设置1个插孔时,移动机器人4牵引物料车2可以转弯行走,设置多个插孔并且插入多个球头锁紧销32时,移动机器人4牵引物料车2只能直线行走。
[0034]
本实用新型的工作原理为:
[0035]
如图1所示,第一牵引装置1的特征识别装置12、牵引公头11安装在物料车2上,第二牵引装置3的结构主体上31安装在移动机器人4上;移动机器人4通过特征识别装置12与物料车2对中,将牵引母头311与牵引公头11对接后,插入球头锁紧销32锁紧;移动机器人4牵引物料车2移动。
[0036]
本文中应用了具体个例对实用新型构思进行了详细阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离该实用新型构思的前提下,所做的任何显而易见的修改、等同替换或其他改进,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1