光检测和测距传感器设备及其控制方法与流程
[0001]
本公开的示例性实施方式涉及一种lidar传感器设备及其控制方法,并且更具体地,涉及一种可以重叠从lidar传感器的多个接收器输入的信号以计算到接收器之间的虚拟检测区域的距离,从而在不增加硬件的情况下基于信号处理提高了lidar传感器的分辨率的lidar传感器设备及其控制方法。
背景技术:
[0002]
通常,光检测和测距(lidar)传感器是通过使用光(例如,激光)来测量距离并感测对象的传感器,并且具有与雷达相似的原理。
[0003]
然而,雷达向外部发射电磁波并利用再次接收的电磁波检查距离、方向等,而lidar发射脉冲激光。即,由于lidar使用短波长的激光,因此具有精度和分辨率高并且可以根据对象进行三维检测的优点。
[0004]
例如,lidar传感器安装在车辆的保险杠上,以感测和检测在车辆前后的区域中的对象、结构等。图1是示出安装在车辆的前保险杠和后保险杠上的lidar传感器的视场(fov)的图。
[0005]
在韩国专利申请特开第10-2015-0009177号(2015年1月26日注册,标题为“lidar传感器系统”)中公开了本公开的背景技术。
技术实现要素:
[0006]
lidar传感器通过包括一组发射激光的发射器和接收从对象反射的激光的接收器的发射/接收组来检测一距离。
[0007]
因此,由于为了具有高分辨率而需要大量的发送/接收组,而配置高分辨率的lidar传感器是昂贵的。
[0008]
各个实施方式旨在提供一种lidar传感器设备及其控制方法,该设备可以重叠从lidar传感器的多个接收器输入的信号以计算到接收器之间的虚拟检测区域的距离,从而在不增加硬件的情况下基于信号处理提高了lidar传感器的分辨率。
[0009]
在实施方式中,lidar传感器设备包括:发射器,被配置为发射激光;第一接收器和第二接收器,分别被配置为在通过所述发射器发射激光后接收从对象反射的反射信号;控制单元,被配置为通过对在通过所述发射器发射激光后,从所述第一接收器和所述第二接收器接收的第一信号和第二信号进行信号处理来计算第一距离和第二距离,并且通过使所述第一信号和所述第二信号重叠而获得的重叠信号进行信号处理来计算中间距离;以及输出单元,被配置为输出由所述控制单元计算的所述第一距离和所述第二距离以及所述中间距离。
[0010]
在实施方式中,控制单元包括:第一信号处理单元,被配置为在通过所述发射器发射激光后,放大第一信号,所述第一信号从由所述对象反射并通过所述第一接收器接收的反射信号获得;第二信号处理单元,被配置为放大从由所述对象反射并通过所述第二接收
器接收的反射信号获得的所述第二信号;重叠信号处理单元,被配置为接收所述第一信号和所述第二信号,并且放大通过重叠所述第一信号和所述第二信号而获得的所述重叠信号;第一距离计算单元,被配置为基于由所述第一信号处理单元处理的所述第一信号来计算所述第一距离;第二距离计算单元,被配置为基于由所述第二信号处理单元处理的所述第二信号来计算所述第二距离;以及中间距离计算单元,被配置为基于由所述重叠信号处理单元处理的所述重叠信号来计算所述中间距离。
[0011]
在实施方式中,所述第一距离计算单元在所述第一信号的幅度大于或等于阈值的时间点计算所述第一距离。
[0012]
在实施方式中,所述第二距离计算单元在所述第二信号的幅度大于或等于阈值的时间点计算所述第二距离。
[0013]
在实施方式中,中间距离计算单元将重叠信号分别与第一信号和第二信号进行比较,并且在重叠信号的幅度大于或等于第一信号的幅度和第二信号的幅度的时间点计算中间距离。
[0014]
在实施方式中,所述重叠信号处理单元通过在水平方向上使所述第一接收器和所述第二接收器接收的所述第一信号和所述第二信号重叠,来生成所述重叠信号。
[0015]
在实施方式中,所述重叠信号处理单元通过在垂直方向上使所述第一接收器和所述第二接收器接收的所述第一信号和所述第二信号重叠,来生成所述重叠信号。
[0016]
在另一个实施方式中,lidar传感器设备的控制方法包括:所述控制单元分别通过第一接收器和第二接收器接收从对象反射的激光的反射信号的步骤;所述控制单元对通过所述第一接收器和所述第二接收器接收的所述第一信号和所述第二信号以及通过重叠所述第一信号和所述第二信号而获得的重叠信号进行信号处理的步骤;所述控制单元基于所述第一信号和所述第二信号来计算第一距离和第二距离并且基于所述重叠信号来计算中间距离的步骤;以及所述控制单元输出所计算出的第一距离和第二距离以及中间距离的步骤。
[0017]
在实施方式中,所述重叠信号是通过在水平方向上重叠所述第一信号和所述第二信号而获得的信号。
[0018]
在实施方式中,所述重叠信号是通过在垂直方向上重叠所述第一信号和所述第二信号而获得的信号。
[0019]
在实施方式中,在计算距离的步骤中,在所述第一信号的幅度大于或等于阈值的时间点计算所述第一距离,在所述第二信号的幅度大于或等于阈值的时间点计算所述第二距离,并且将所述重叠信号分别与所述第一信号和所述第二信号进行比较,并且在所述重叠信号的幅度大于所述第一信号的幅度和所述第二信号的幅度的时间点计算所述中间距离。
[0020]
根据实施方式的lidar传感器设备及其设备控制方法重叠从lidar传感器的多个接收器输入的信号,以计算到接收器之间虚拟检测区域的距离,并基于信号处理来计算接收器之间的中间距离,而无需添加硬件,从而提高了lidar传感器的分辨率。
附图说明
[0021]
图1是示出安装在普通车辆的前后保险杠上的lidar传感器的视场(fov)的图。
[0022]
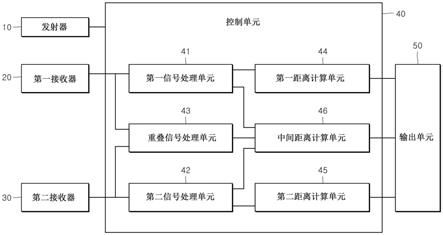
图2是示出根据本公开的实施方式的lidar传感器设备的框图。
[0023]
图3是示出根据本公开的实施方式的lidar传感器设备的检测区域的配置图。
[0024]
图4是示出根据本公开的实施方式的lidar传感器设备中的反射信号的图。
[0025]
图5a和图5b是示出根据本公开的实施方式的lidar传感器设备的分辨率的扩展状态的图。
[0026]
图6是示出根据本公开的实施方式的lidar传感器设备的控制方法的流程图。
具体实施方式
[0027]
在下文中,将在下面参考附图描述根据本公开的实施方式的lidar传感器设备及其控制方法。
[0028]
在该过程中,为了清楚和便于解释的目的,可能夸大附图中示出的线的粗细或元件的尺寸。稍后描述的术语是考虑到本公开中其功能而定义的术语,并且可以根据用户或操作者的意图或实践来改变。因此,应基于本说明书的公开内容来定义这些术语。
[0029]
图2是示出根据本公开的实施方式的lidar传感器设备的框图,图3是示出根据本公开的实施方式的lidar传感器设备的检测区域的配置图,图4是示出根据本公开的实施方式的lidar传感器设备中的反射信号的图,图5a和图5b是示出根据本公开的实施方式的lidar传感器设备的分辨率的扩展状态的图。
[0030]
如图2所示,根据本公开的实施方式的lidar传感器设备可以包括发射器10、第一接收器20和第二接收器30、控制单元40以及输出单元50。
[0031]
发射器10发射脉冲激光,使得接收从对象100反射的反射信号,并且可以检测对象100。
[0032]
在通过发射器10发射激光之后,第一接收器20和第二接收器30可以向控制单元40提供从由对象100反射的反射信号获得的第一信号和第二信号。
[0033]
控制单元40可在通过发射器10发射激光后,通过对从第一接收器20和第二接收器30接收的第一信号和第二信号进行信号处理来计算第一距离和第二距离,并通过对通过重叠第一信号和第二信号而获得的重叠信号进行信号处理来计算中间距离。
[0034]
控制单元40可以包括第一信号处理单元41、第二信号处理单元42、重叠信号处理单元43、第一距离计算单元44、第二距离计算单元45和中间距离计算单元46。
[0035]
在通过发射器10发射激光后,第一信号处理单元41放大从由对象100反射并通过第一接收器20接收的反射信号获得的第一信号,并处理该信号。
[0036]
第二信号处理单元42放大从由对象100反射并通过第二接收器30接收的反射信号获得的第二信号,并处理该信号。
[0037]
重叠信号处理单元43接收第一信号和第二信号,放大通过重叠第一信号和第二信号获得的重叠信号,并处理该信号。
[0038]
例如,如图3所示,第一接收器20的第一检测区域410能够以距对象100的边缘距离为a且距后对象100为距离b形成在前对象100上,并且第二接收器30的第二检测区域420能够以距离b形成在对象100的后面。
[0039]
因此,如图4所示,可以在时间点a和时间点b接收第一信号(其是由第一接收器20接收的反射信号),并且可以在时间点b接收第二信号(其是由第二接收器30接收的反射信
号)。
[0040]
这里,重叠信号是通过将第一信号和第二信号重叠而获得的信号,并且可以指示重叠检测区域430,其中,如图3所示,第一接收器20的第一检测区域420和第二接收器30的第二检测区域410彼此重叠。
[0041]
因此,如图4所示,重叠信号可出现在时间点a和b处,但是在时间点a处的幅度与第一信号相同并且没有差异,但是,其在时间点b的幅度对应于第一信号的幅度与第二信号的幅度之和,并因此产生大的差异。
[0042]
这里,如图5a所示,重叠信号处理单元43可以通过在水平方向上使第一接收器20和第二接收器30接收的第一信号和第二信号重叠来生成重叠信号,从而增加水平分辨率。如图5b所示,重叠信号处理单元43可以通过在垂直方向上使第一接收器20和第二接收器30接收的第一信号和第二信号重叠来生成重叠信号,从而增加垂直分辨率。
[0043]
同时,重叠信号处理单元43可以通过在水平方向和垂直方向两者上重叠第一信号和第二信号来生成重叠信号,可以在对角线方向上重叠第一信号和第二信号或者可以通过对重叠信号进行重叠来生成重叠信号。
[0044]
第一距离计算单元44可以基于第一信号在由第一信号处理单元41处理的第一信号的幅度大于或等于阈值的时间点计算第一距离。
[0045]
即,第一距离计算单元44可以基于第一信号在时间点a计算距离a。
[0046]
第二距离计算单元45可以基于第二信号在由第二信号处理单元42处理的第二信号的幅度大于或等于阈值的时间点计算第二距离。
[0047]
即,第二距离计算单元45可以基于第二信号在时间点b计算距离b。
[0048]
此外,中间距离计算单元46可以基于由重叠信号处理单元43处理的重叠信号来计算中间距离。
[0049]
这里,中间距离计算单元46可以将重叠信号分别与第一信号和第二信号进行比较,并且在重叠信号的幅度大于第一信号的幅度和第二信号的幅度的时间点计算中间距离。
[0050]
即,中间距离计算单元46可以基于重叠信号在时间点b计算距离b。
[0051]
输出单元50可以输出由控制单元40计算出的第一距离、第二距离和中间距离。
[0052]
如上所述,利用根据本公开的实施方式的lidar传感器设备,重叠从lidar传感器的多个接收器输入的信号,以计算到接收器之间的虚拟检测区域的距离,并且基于信号处理来计算接收器之间的中间距离,而无需添加硬件,从而提高lidar传感器的分辨率。
[0053]
图6是示出根据本公开的实施方式的lidar传感器设备的控制方法的流程图。
[0054]
如图6所示,在根据本公开的实施方式的lidar传感器设备的控制方法中,控制单元40通过发射器10发射脉冲激光(s10)。
[0055]
在步骤s10中发射脉冲激光后,控制单元40分别通过第一接收器20和第二接收器30接收从对象100反射的激光的反射信号(s20)。
[0056]
在步骤s20中接收到反射信号后,控制单元40放大通过第一接收器20和第二接收器30接收的第一信号和第二信号并且放大通过重叠第一信号和第二信号而获得的重叠信号,并处理这些信号(s30)。
[0057]
这里,如图5a所示,控制单元40可以通过在水平方向上使第一接收器20和第二接
收器30接收的第一信号和第二信号重叠来生成重叠信号,从而增加水平分辨率,并且如图5b所示,可以通过在垂直方向上使第一接收器20和第二接收器30接收的第一信号和第二信号重叠来生成重叠信号,从而增加垂直分辨率。
[0058]
同时,控制单元40可以通过在水平方向和垂直方向两者上重叠第一信号和第二信号来生成重叠信号,可以在对角线方向上重叠第一信号和第二信号或者可以通过对重叠信号进行重叠来生成重叠信号。
[0059]
在步骤s30中处理第一信号和第二信号以及重叠信号之后,控制单元40基于第一信号和第二信号以及重叠信号来计算第一距离和第二距离以及中间距离(s40)。
[0060]
这里,控制单元40可以基于第一信号在第一信号的幅度大于或等于阈值的时间点来计算第一距离,在时间点a计算距离a,并且基于第二信号在第二信号的幅度大于或等于阈值的时间点来计算第二距离,并且在时间点b计算距离b。
[0061]
此外,控制单元40可以基于重叠信号来计算中间距离。即,控制单元40可以将重叠信号分别与第一信号和第二信号进行比较,在重叠信号的幅度大于第一信号的幅度和第二信号的幅度的时间点计算中间距离,并计算在时间点b的距离b。
[0062]
在步骤s40中计算距对象100的距离后,控制单元40通过输出单元50输出所计算的第一距离和第二距离以及中间距离的结果(s50)。
[0063]
如上所述,利用根据本公开的实施方式的lidar传感器设备及其控制方法,重叠从lidar传感器的多个接收器输入的信号,以计算到接收器之间的虚拟检测区域的距离,并且基于信号处理来计算接收器之间的中间距离,而无需添加硬件,从而提高lidar传感器的分辨率。
[0064]
例如,可以用方法或过程、设备、软件程序、数据流或信号来实施本说明书中描述的实施方式。尽管仅在单一形式的实施方式中进行了讨论(例如,仅作为一种方法进行了讨论),但是所讨论的特征也可以作为其他形式(例如,一种设备或程序)来实现。该设备可以用适当的硬件、软件、固件等来实现。该方法可以在诸如处理器之类的设备中实现,该设备通常是指包括计算机、微处理器、集成电路或可编程逻辑设备的处理设备。处理器包括通信设备,例如计算机、蜂窝电话、便携式/个人数字助理(pda),以及其他有助于最终用户之间信息通信的设备。
[0065]
尽管已经参考附图中示出的实施方式描述了本公开,但是本公开的实施方式仅用于说明目的,并且本领域技术人员将理解,各种修改和其他等效实施方式是可能的。
[0066]
因此,本公开的真实技术范围应由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1