一种乘用车传动系动平衡灵敏度试验分析方法与流程
1.本发明涉及车辆工程领域,提供一种乘用车传动系动平衡灵敏度试验分析方法。
背景技术:
2.随着社会的高速发展,使得人们对汽车nvh性能(振动、噪声和声振粗糙度)的要求越来越高。乘用车传动系不平衡导致的一阶振动噪声抱怨是后驱车型和四驱车型用户抱怨比较多的一类振动噪声问题。而控制不平衡的方式主要发生在汽车开发过程的初期,比如控制传动系统中单个件的剩余动不平衡量,但控制传动系单件的剩余不平衡明显会增加成本,同样的剩余不平衡量在不同的整车产品中导致的整车振动噪声水平也不同,若等到整车到了市场,客户抱怨的类似问题解决起来难就就比较大,所以在汽车产品开发过程中,除了控制传动系单件剩余不平衡量之外,也要控制传递路径中的灵敏度问题,而控制灵敏度的首先关键问题是识别出灵敏度问题。
技术实现要素:
3.为了解决灵敏度识别问题,本发明提供了一种传动系动平衡灵敏度的试验分析方法。
4.本发明提供的试验分析方法通过对现有整车传动系统不平衡量进行识别和现场动平衡量清零,然后通过在不同不平衡面增加不平衡质量的方法,识别出车内不同位置对传动系统不同平衡面的剩余不平衡灵敏度,所述试验分析方法由十一个步骤组成,具体包括:
5.步骤一:记录车速从65千米/小时开始,按照15千米/小时间隔增加直到160千米/小时所对应的传动轴转速曲线;
6.步骤二:设置振动测量点,采集记录振动测量点振动响应;
7.步骤三:传动系动平衡转速选择;
8.步骤四:测试30秒稳定转速信号;
9.步骤五:各试重状态不平衡测量;
10.步骤六:传动系剩余动不平衡量估计,采用多平面影响系数法估算传动轴每个平衡平面剩余不平衡量幅值和相位;
11.步骤七:对每个不平衡面进行传动系剩余动不平衡矫正;
12.步骤八:动平衡加权基准确定;
13.步骤九:传动系各位置剩余不平衡量测试;
14.步骤十:附加不平衡质量试验;
15.步骤十一:传动系动平衡灵敏度分析。
16.进一步,所述步骤二具体实施方式为:从车速65km/h缓慢加速(加速时间步长0.75km/h/s)到160km/h,并采集驾驶员座椅、驾驶员外耳、车内后右外耳和转向盘的振动响应数据。检查确保后主减速器壳体振动速度传动系一阶信号不受轮胎阶次信号干扰,检查
确保变速器壳体突出位置振动速度传动系一阶信号不受发动机主和谐阶次干扰,若受干扰,改变变速器挡位重复采集,直到选择合适挡位为止,记录下三组以上有效数据。
17.进一步,所述步骤三具体实施方式为:参考步骤二中传动系一阶振动数据,确定一个传动轴转速,该转速下车速≥130千米/小时,且传动系一阶振动信号有稳定幅值和相位,记下该传动轴转速。
18.进一步,所述步骤四具体实施方式为:按照步骤三确定的传动轴转速,采用转毂带车的模式,变速器为手动挡时选择m挡,变速器为自动挡时选择d挡,车速达到传动轴动平衡转速,即车速≥130千米/小时,且具有稳定的幅值和相位的工况,在传动轴转速不变的情况下,采集30秒数据。
19.进一步,所述步骤五具体实施方式为:在步骤四中稳定车速下,将试重装置放置在传动轴和后主减速器连接位置传动轴平衡平面上,定义一个0相位位置并做好标记,试验完成后,去除试重;选定三处传动轴平衡面,并依次把试重装置放置在传动轴不同平衡面位置,每做完一处试验后去除试重,再把试重装置放置在下一处。
20.进一步,所述步骤七具体实施方式为:根据步骤六估算的传动系各平衡平面剩余不平衡的幅值和相位,在各矫正面增加矫正不平衡质量,通过反复利用多平面影响系数法对各平衡平面进行动平衡矫正,直到传动系每个面0平衡。
21.进一步,所述步骤八具体实施方式为:设置传动系最大预期不平衡质量,将不平衡质量同时附加在每节传动轴平衡平面的位置,传动轴每个平衡平面所添加的不平衡质量应该180
°
反相位,不平衡质量应尽可能地靠近传动轴制造平衡平面。
22.进一步,所述步骤九具体实施方式为:添加试重后,将从车速65km/h缓慢加速,加速时间步长0.75km/h/s,到160km/h,测试并得出至少三组有效数据。
23.进一步,所述步骤十具体实施方式为:在保留步骤八所增加的不平衡质量情况下,在各个位置增加用于分析传动系灵敏度所用的附加不平衡质量,用于后续灵敏度分析;每次只在一个位置增加,试验完成后去除附加质量,再在其它位置增加附加质量,获得至少三组有附加动不平衡质量的曲线。
24.进一步,所述步骤十一中传动系动平衡灵敏度分析指标为:
25.噪声灵敏度:db(l)/(g
·
cm)
26.座椅导轨振动灵敏度:(mm/s)/(g
·
cm)
27.转向盘振动灵敏度:(mm/s)/(g
·
cm)
28.地板振动灵敏度:(mm/s)/(g
·
cm)
29.灵敏度计算公式如下:
[0030][0031]si,j
:j平面不平衡导致i平面处的振动响应灵敏度
[0032]rti
(f):在j平面加权基准试重基础上增加质量后在i平面的振动噪声响应
[0033]ri
(f):在加权基准各平衡平面增加试重后在i平面的振动噪声响应
[0034]
itj:各平面试重保留状态下在j平面增加的不平衡量
[0035]
使用本方法对传动系统不同平衡面的剩余不平衡灵敏度进行识别,为进一步控制传动系统剩余不平衡量提供数据和技术支撑,使得整车车身开发和传动系单件动平衡控制
相对平衡,降低车辆研发成本。
附图说明
[0036]
图1为转向盘振动测点示意图;
[0037]
图2为驾驶员座椅导轨振动测点示意图;
[0038]
图3为传声器位置示意图(四驱/后驱布置rro测点,前驱布置flo测点);
[0039]
图4为传声器振动测点布置示意图(rro为例);
[0040]
图5为传动轴增加试重块示意图;
[0041]
图6为不平衡量添加位置(相位相差180
°
);
[0042]
图7为附加质量添加位置(后主减速器位置);
[0043]
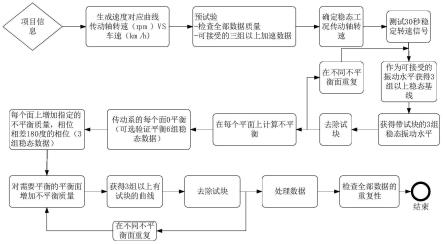
图8为整体工作流程图。
具体实施方式
[0044]
为了更好地了解本发明的内容,下面结合附图,对本发明做进一步详细描述。该发明专利为一种技术手段。步骤一至步骤十一和图8中的工作流程图说明了整个工作的过程和顺序。
[0045]
步骤一:记录下车速稳定在65千米/小时的传动轴转速,然后车速按照15千米/小时间隔增加(80千米/小时,95千米/小时......),直到160千米/小时或者最高车速。描述出车速对应传动轴转速曲线,横坐标为传动轴转速,纵坐标为车速。
[0046]
步骤二:从车速65km/h缓慢加速(加速时间步长0.75km/h/s)到160km/h加速工况采集数据一组(驾驶员座椅、驾驶员外耳(flo)、车内后右外耳(rro)、转向盘等关键位置),检查确保后主减速器壳体振动速度传动系一阶信号不受轮胎阶次信号干扰。检查确保变速器壳体突出位置振动速度传动系一阶信号不受发动机主和谐阶次干扰。若受干扰,改变变速器挡位重复采集,直到选择合适挡位为止,记录下三组以上有效数据。
[0047]
转向盘振动测量点:转向盘12点位置,见图1。
[0048]
驾驶员座椅导轨振动测量点:驾驶员座椅导轨前部外侧、驾驶员座椅导轨后部内侧,测点位置及测量方向见图2。
[0049]
传声器振动测点:传声器位置示意图见图3,传声器振动测点布置示意图见图4。
[0050]
步骤三:参考步骤二中传动系一阶振动数据,确定一个传动轴转速(该转速下车速≥130千米/小时,且传动系一阶振动信号有稳定幅值和相位),记下该传动轴转速(单位转/分)。
[0051]
步骤四:按照步骤三确定的车速和传动轴转速,采用传毂带车模式,变速器处于m挡(手动挡变速器)或者d挡(自动挡变速器),车速达到传动轴动平衡转速(车速≥130千米/小时,且具有稳定的幅值和相位的工况),在传动轴转速不变的情况下,采集30秒数据。
[0052]
步骤五:在步骤四中稳定车速下,将某一重量试重质量放置在传动轴和后主减速器连接位置传动轴平衡平面上,定义一个0相位位置并做好标记。试验完成后,去除试重。并依次把试重放置在传动轴不同平衡面位置,每做完一处,试重均去除,参考图5设置试重位置,试重应尽可能放置在传动轴动平衡位置。
[0053]
步骤六:传动系剩余动不平衡量估计,推荐采用多平面影响系数法估算传动轴每
个平衡平面剩余不平衡量幅值和相位。
[0054]
步骤七:对每个不平衡面进行传动系剩余动不平衡矫正,根据步骤六估算的传动系各平衡平面剩余不平衡的幅值和相位,在各矫正面增加矫正不平衡质量,通过反复利用多平面影响系数法对各平衡平面进行动平衡矫正,直到客观测试结果和主观评价结果均可接受为止(从车速65km/h缓慢加速,加速时间步长0.75km/h/s,到160km/h)。
[0055]
步骤八:动平衡加权基准确定,设置传动系最大预期不平衡量(所有平衡平面同时添加),将不平衡质量附加在每节传动轴平衡平面的位置,传动轴每个平衡平面所添加的不平衡量应该180
°
反相位,参考图6所示,试重尽可能地靠近传动轴制造平衡平面。
[0056]
步骤九:根据步骤八建议和获得的传动系各位置剩余动不平衡量,从车速65km/h缓慢加速,加速时间步长0.75km/h/s,到160km/h,测试至少三组有效数据。
[0057]
步骤十:在步骤八增加试重保留情况下在各个位置增加测试传动系灵敏度所用的附加动不平衡质量,用于后续灵敏度分析。试重布置位置参考图7,每次试验完成后,去除附加质量,再在其它位置分别增加附加质量进行试验。
[0058]
步骤十一:传动系动平衡灵敏度分析,传动系动平衡灵敏度分析指标为:
[0059]
噪声灵敏度:db(l)/(g
·
cm);
[0060]
振动灵敏度(座椅导轨):(mm/s)/(g
·
cm);
[0061]
振动灵敏度(转向盘):(mm/s)/(g
·
cm);
[0062]
振动灵敏度(地板):(mm/s)/(g
·
cm);
[0063]
传动系动平衡灵敏度计算公式为:
[0064][0065]si,j
:j平面不平衡导致i平面处的振动响应灵敏度;
[0066]rti
(f):在j平面加权基准试重基础上增加质量后在i平面的振动噪声响应(各平面试重保留状态下);
[0067]ri
(f):在加权基准各平衡平面增加试重后在i平面的振动噪声响应;
[0068]
itj:在j平面增加的不平衡量(各平面试重保留状态下)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1