一种菱角脱壳装置及其脱壳方法
本发明属于农业机械领域,具体涉及一种菱角脱壳装置及其脱壳方法。
背景技术:
1、菱角原产于中国南方,在珠江三角洲及长江下游沿岸栽培较多,菱角果实含有丰富的蛋白质、膳食纤维、以及维生素和矿物质,并且还含有很多抗氧化剂,具有一定的抗衰老和抗癌作用。此外,菱角果实还有利尿、消肿、清热、解毒等功效,可以帮助身体排毒,改善肠道健康,促进人体新陈代谢。因此,菱角果实对身体健康具有很多益处。菱角壳相比于菱角果实的营养价值较低,但仍然有一些特定的用途和价值。菱角壳可以作为有机肥料或动物饲料的原料,它含有一定的纤维素和植物营养物质,在农业上可以作为土壤改良剂,帮助改善土壤结构和保持土壤水分,同时可作为生物复合材料的原料,用于环境保护和生态修复工程中,如可以利用菱角壳制作生态坡面,用于河道和水库的护坡工程,有助于保护土壤和水源。
2、目前菱角脱壳以及变质菱角果实和没有变质菱角果实的筛选主要通过人工完成,劳动力大,且人工脱壳时,由于菱角有角,容易伤到手部;目前也有可以进行菱角脱壳的装置,但是需要人工手动将菱角放入夹持装置中,菱角脱壳效率低,且无法实现对变质菱角果实和没有变质菱角果实的筛选。
技术实现思路
1、本发明的目的是为了克服现有技术不足,提出一种菱角脱壳装置及其脱壳方法。
2、为实现上述目的,本发明采用以下技术方案:
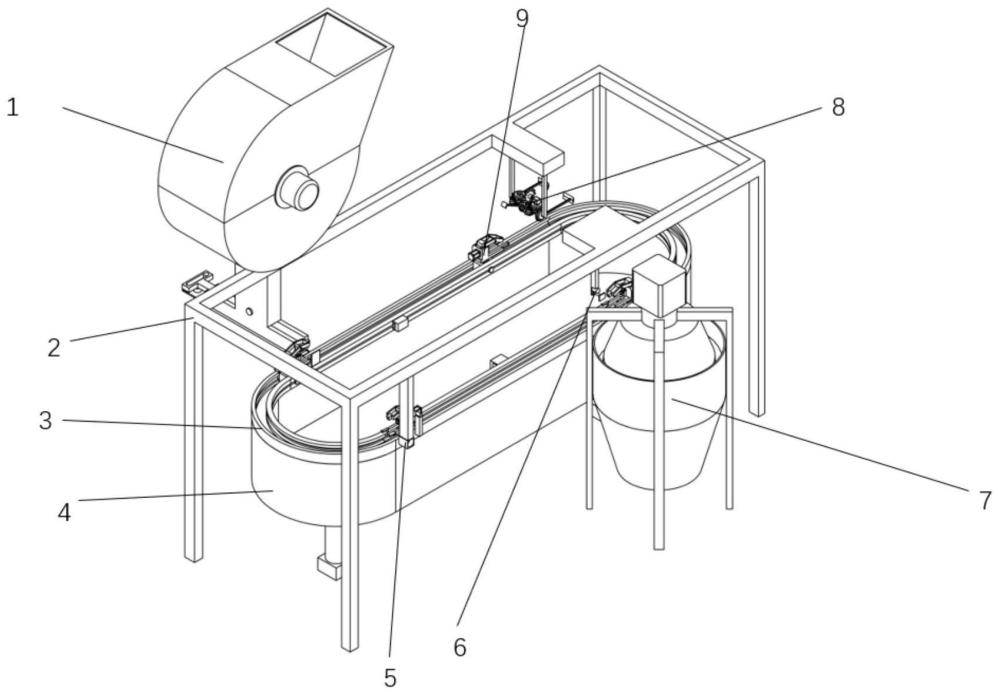
3、本发明一种菱角脱壳装置,包括送料装置、机架、环形轨道、果壳收集框、风机、电动推杆、筛选装置、切割装置和夹持装置。所述果壳收集框设于机架中部,环形轨道固定于果壳收集框上,且环形轨道上依次且间距设有夹持工位、切壳工位、脱壳工位和存壳工位,每个工位设有一个夹持装置,送料装置、切割装置、电动推杆和风机均设于机架上,并依次位于夹持工位、切壳工位、脱壳工位和存壳工位的位置处。
4、所述夹持装置包括移动座、滚轮、连杆块、连接杆和夹爪;所述移动座与环形轨道构成滑动副;滚轮与移动座构成转动副,并与环形轨道构成滚动摩擦副,且由电机一驱动;所述移动座上位于环形轨道的上方设有一体成型且水平设置的u型板,且u型板的两个臂上远离移动座的一端均固定有托板,托板上远离移动座的一端设有一体成型的凸板,且托板上还设有压力传感器;所述夹爪设于u型板的正上方,并与移动座铰接;所述连杆块设于u型板和夹爪之间,与移动座构成水平方向的滑动副,并由气缸驱动;所述连接杆两端与夹爪中部的弯折部和连杆块铰接,且夹爪上远离移动座的一端设有一体成型的尖刺。
5、所述送料装置包括送料壳体、导向件、推块、旋转轴和限位筒;所述送料壳体固定于机架上,并位于环形轨道的上方,且送料壳体上端开设有送料口,下端开设有出料口;旋转轴与送料壳体构成转动副,并由电机二驱动;所述限位筒与旋转轴同轴固定,并位于送料壳体内腔,且限位筒外圈与送料壳体的弧形内壁之间存在间隙,并固定有沿周向均布的多个弧形板;所述导向件固定于送料壳体上位于出料口的位置,并位于环形轨道的外侧,且导向件上端开设有竖直设置的导向槽,下端开设有水平设置的滑槽,滑槽通过导向槽和出料口与送料壳体内腔连通;所述推块与滑槽构成滑动副,并由驱动件驱动,且滑槽上远离推块的一端位于环形轨道上处于夹持工位夹持装置的托板外侧,导向件上设有光电传感器。其中,导向槽的横截面形状由共底的两个等腰梯形组成。
6、所述切割装置位于环形轨道的上方,包括刀具一、刀具二、电机三、连接套筒、连接架和刀具三。所述连接架固定于机架上;连接套筒套置在连接架中部,与连接架中部构成转动副;电机三的电机壳体固定于机架上,电机三的输出轴通过齿轮副一与连接套筒连接;所述刀具一包括固定杆和刀片,刀片固定于固定杆上,固定杆垂直于连接套筒的中轴线设置,且固定杆上远离刀片的一端与连接套筒固定;刀具二和刀具三的结构与刀具一的结构一致,且刀具二和刀具三的固定杆上远离刀片的一端与连接架两端分别铰接,并通过齿轮副二和齿轮副三与连接套筒两端分别连接。其中,刀具一和刀具二的转动方向相反,刀具二和刀具三的转动方向一致,且刀具二和刀具三对称设置。
7、所述电动推杆水平设于环形轨道内侧,筛选装置设于环形轨道外侧,并正对电动推杆的移动杆末端。所述筛选装置包括支撑架、圆柱形外壳、果肉收集框和磨碎件;所述圆柱形外壳竖直固定于支撑架上;磨碎件为圆台形,并设于圆柱形外壳内,与支撑架构成转动副,由电机四驱动,且磨碎件的外侧壁开设有螺旋槽,螺旋槽的槽深自上而下逐渐递减;所述果肉收集框固定于圆柱形外壳下端,且果肉收集框内固定有筛网。其中,磨碎件采用橡胶材料。所述风机位于环形轨道的外侧。
8、优选地,所述环形轨道内侧与滑槽对齐的位置处固定有挡板,环形轨道外侧位于电动推杆和风机的位置处分别设有光电发射器一和光电发射器二;移动座上设有信号接收器。
9、优选地,所述送料壳体包括上盖和下盖,上盖和下盖均中空设置,且上盖上端开设有送料口,下端开口,下盖上端开口,下端开设有出料口,上盖下端开口位置处与下盖上端开口位置处固定,上盖内腔和下盖内腔连通。
10、优选地,所述驱动件包括曲柄、连杆和电机五,电机五的电机壳体固定于导向件上,电机五的输出轴与曲柄的一端固定,连杆的两端与曲柄的另一端和推块铰接。
11、优选地,所述旋转轴上固定有沿周向均布的多个旋转叶,各旋转叶上远离旋转轴的一端均与限位筒的内圈固定。
12、优选地,所述移动座包括上底座和下底座,上底座固定于下底座上;下底座与环形轨道构成滑动副,滚轮与下底座构成转动副;上底座上设有一体成型且水平设置的u型板,夹爪与上底座铰接;连杆块上设有一体成型且水平设置的滑杆,滑杆与上底座构成滑动副,并由气缸驱动。
13、优选地,所述齿轮副一包括直齿轮一和直齿轮二,直齿轮一与连接架构成转动副,并与连接套筒同轴固定,直齿轮二与电机三的输出轴同轴固定,并与直齿轮一啮合。
14、更优选地,所述齿轮副二包括锥齿轮一、锥齿轮二和锥齿轮三,锥齿轮一、锥齿轮二和锥齿轮三均与连接架构成转动副,且锥齿轮三与直齿轮一上远离连接套筒的一端同轴固定,锥齿轮二和锥齿轮三同轴设置,锥齿轮一设于锥齿轮二和锥齿轮三之间,并与锥齿轮二和锥齿轮三均啮合;刀具二的固定杆上远离刀片的一端与锥齿轮二固定。
15、更优选地,所述齿轮副三包括锥齿轮四、锥齿轮五和锥齿轮六,锥齿轮四、锥齿轮五和锥齿轮六均与连接架构成转动副,且锥齿轮四与连接套筒上远离直齿轮一的一端同轴固定,锥齿轮五和锥齿轮六同轴设置,锥齿轮四设于锥齿轮五和锥齿轮六之间,并与锥齿轮五和锥齿轮六均啮合;刀具三的固定杆上远离刀片的一端与锥齿轮五固定。
16、本发明一种菱角脱壳装置的脱壳方法,具体如下:
17、将菱角从送料口倒入送料壳体内,控制器控制电机四工作;接着控制器控制电机二驱动旋转轴带动限位筒和各弧形板转动,弧形板将位于送料口位置处的菱角带入限位筒与送料壳体的间隙中,且由于限位筒与送料壳体间隙的限制作用,菱角以侧卧姿态处于限位筒与送料壳体的间隙中,随着旋转轴的转动,菱角被带至出料口,并在自身重力作用下以侧卧姿态从出料口掉入导向槽内,直至光电传感器检测到菱角落至滑槽中;然后驱动件驱动推块向靠近环形轨道的方向移动,推块与菱角的一个角接触,并推动菱角向环形轨道上处于夹持工位夹持装置的托板处移动,直至该夹持装置上的压力传感器检测到压力信号值处于预设压力范围一内,菱角以侧卧姿态被推至两个托板上。驱动件驱动推块向远离环形轨道的方向移动至原位,同时控制器控制该夹持装置上气缸的活塞杆收缩,气缸的活塞杆通过连杆块和连接杆带动夹爪向下转动,夹爪上的尖刺接触菱角,并刺入菱角壳的后端,直至压力传感器检测到压力信号值处于预设压力范围二内,夹爪与两个托板上的凸板夹紧菱角,完成菱角的夹持工作。控制器控制各夹持装置的电机一驱动滚轮转动,滚轮与环形轨道之间的摩擦力带动滚轮前进,进而带动整个夹持装置前进,直至各夹持装置移动至下一个工位,此时完成夹持工作的夹持装置移动至切壳工位,前一个夹持装置移动至脱壳工位,后一个夹持装置移动至夹持工位,等待下一个菱角的夹持工作,剩余一个夹持装置移动至存壳工位。
18、完成夹持工作的夹持装置移动至切壳工位时,控制器控制电机三通过齿轮副一驱动连接套筒转动,连接套筒带动刀具一向后转动,并通过齿轮副二和齿轮副三带动刀具二和刀具三向前转动,直至连接套筒转动一周,刀具一、刀具二和刀具三转动至原位;刀具一、刀具二和刀具三转动过程中,刀具一的刀片将菱角上位于前端位置处的菱角壳和位于中部位置处的顶部菱角壳切除,刀具二和刀具三的刀片将菱角的两个角以及靠近两个角的顶部菱角壳切除,使得菱角上位于顶部的大部分菱角壳以及两个角均被切除,菱角果实两端和顶部裸露出来,且被切除下来的菱角壳落至果壳收集框内,完成菱角的顶部菱角壳及两个角的切除与收集工作,同时后一个夹持装置完成另一个菱角的夹持工作。然后控制器控制各夹持装置的电机一驱动滚轮继续转动,各夹持装置继续前进,直至各夹持装置移动至下一个工位。
19、完成切除与收集工作的夹持装置移动至脱壳工位时,该夹持装置上的信号接收器接收到光电发射器一的信号,该夹持装置中气缸驱动夹爪向上转动1°松开菱角,控制器控制电动推杆的移动杆末端伸出,电动推杆的移动杆末端与裸露的菱角果实上位于内侧的位置处接触,并推动菱角果实向筛选装置处移动,菱角果实与剩余的菱角壳脱离,并落入圆柱形外壳内;接着控制器控制电动推杆的移动杆末端收缩至原位,完成菱角果实与菱角壳的分离工作,同时后一个夹持装置完成另一个菱角顶部菱角壳的切除与收集工作;然后控制器控制各夹持装置的电机一驱动滚轮继续转动,各夹持装置继续前进,直至各夹持装置移动至下一个工位。
20、完成分离工作的夹持装置移动至存壳工位时,该夹持装置上的信号接收器接收到光电发射器二的信号,控制器控制该夹持装置上气缸的活塞杆伸长,气缸的活塞杆通过连杆块和连接杆带动夹爪向上转动至原位,夹爪和两个凸板松开剩余的菱角壳,此时剩余的菱角壳位于托板上或尖刺上;接着控制器控制风机工作,将剩余的菱角壳从托板或尖刺上吹落至果壳收集框内,完成剩余菱角壳的收集工作,同时后一个夹持装置完成另一个菱角的菱角果实与菱角壳的分离工作。
21、其中,电机四驱动磨碎件旋转,落入圆柱形外壳内的菱角果实在磨碎件的转动下进入螺旋槽中,随着磨碎件的旋转,菱角果实被螺旋槽向果肉收集框输送,且随着螺旋槽的槽深逐渐变小,菱角果实受到磨碎件和圆柱形外壳的挤压力和摩擦力,由于磨碎件采用橡胶材料,而变质的菱角果实比没有变质的菱角果实软,磨碎件和圆柱形外壳对菱角果实的挤压作用和摩擦作用使得变质的菱角果实被磨碎,但不会磨碎没有变质的菱角果实;随着磨碎件的旋转,菱角果实被向下输送至果肉收集框,其中变质且被磨碎的菱角果实落至筛网下,没有变质且完好的菱角果实落至筛网上,完成菱角果实的筛选与收集工作。
22、本发明具有以下有益效果:
23、1、本发明代替人工实现了对菱角的自动夹持工作,并实现了对菱角的自动脱壳工作,降低了劳动力,减少了人工脱壳时菱角的角对手部的伤害,提高了脱壳效率,且实现了对变质菱角果实和没有变质菱角果实的筛选,进一步降低了劳动力。具体地,本发明通过送料装置将菱角以侧卧姿态输送至位于夹持工位的夹持装置托板上,实现了对菱角的输送工作,接着位于夹持工位的夹持装置中气缸驱动连杆块和连接杆带动夹爪向下转动,夹爪上的尖刺刺入菱角壳的后端,并与托板上的凸板夹紧菱角,实现了对菱角的夹持工作,然后完成夹持工作的夹持装置移动至切壳工位,切割装置切除菱角上位于顶部的大部分菱角壳以及两个角,且被切除下来的菱角壳落至果壳收集框内,实现了对菱角的顶部菱角壳及两个角的切除与收集工作;进一步,完成切除与收集工作的夹持装置移动至脱壳工位,夹持装置中气缸驱动夹爪稍微向上转动松开菱角,电动推杆推动菱角果实与剩余菱角壳分离,并将菱角果实推至筛选装置的圆柱形外壳内,实现了菱角的脱壳工作;再进一步,完成脱壳工作的夹持装置移动至存壳工位,夹持装置中气缸驱动夹爪向上转动至初始位置,松开剩余的菱角壳,风机将剩余的菱角壳吹落至果壳收集框内,实现了对剩余菱角壳的收集工作;同时落入圆柱形外壳内的菱角果实被螺旋槽向果肉收集框输送,且随着螺旋槽的槽深逐渐变小,变质菱角果实在圆柱形外壳与采用软质材料的磨碎件的挤压力和摩擦力作用下被磨碎,并落至筛网下,而没有变质的菱角果实不会被磨碎,并落至筛网上,实现了对菱角果实的筛选与收集工作。
24、2、本发明在环形轨道上设有四个工位,且每个工位设有一个夹持装置,使得夹持工作、切除与收集工作、脱壳工作和剩余菱角壳的收集工作能够同时进行,并能够循环进行,提高了菱角整体处理流程的效率,进一步提高了脱壳效率,并提高了经济效益。
- 还没有人留言评论。精彩留言会获得点赞!