智能语音识别遥控手术椅的制作方法
[0001]
本发明属于医疗器械技术领域,具体来说涉及一种智能语音识别遥控手术椅。
背景技术:
[0002]
手术椅是一种常见的医疗设备,用于在医生进行外科手术时供手术医生以坐姿进行手术操作。实践中,由于主刀医生的身材差异性,往往需要在手术过程中对手术椅进行高度、水平角度的微调。目前的手术椅一般需要采用人工现场调试的方式进行上述微调,容易打断医生的手术节奏,降低了手术效率。因此,如何开发出一种基于语音识别技术实现的遥控手术椅,使得医生能够通过语音对手术椅实现位移微调的智能化控制,让医生手术台上操作时便捷,减少疲劳操作机会,提升医生手术效率,是本领域技术人员需要研究的方向。
技术实现要素:
[0003]
本发明的目的是提供一种智能语音识别遥控手术椅,能够在手术过程中以语音控制的方式实现对手术椅的位移微调,以提升医生手术效率。
[0004]
其采用的技术方案如下:
[0005]
一种智能语音识别遥控手术椅,其包括:手术椅本体,语音控制系统和执行机构;所述语音控制系统包括语音采集装置,语音识别模块和控制命令模块;所述语音采集装置用于采集现场语音、生成语音信号并将该语音信号上传至语音识别模块;所述语音识别模块用于读取语音采集装置输出的语音信号、并输出匹配于该语音信号的语音识别结果;所述控制命令模块用于读取语音识别模块输出的语音识别结果、对执行机构输出对应于该语音识别结果的控制指令、驱动执行机构工作;所述执行机构连接手术椅本体、用于实现手术椅本体的位移调整。
[0006]
优选的是,上述智能语音识别遥控手术椅中:所述语音识别模块包括依序连接的接收单元,提取单元,识别单元;所述接收单元用于接收由语音采集装置上传的语音信号、并将该语音信号输出至提取单元;所述提取单元用于在接收单元输出的语音信号中提取特征向量并将该特征向量输出至识别单元;所述单元中存有预先训练的声学模型、用于将提取单元输出的特征向量输入至所述声学模型中、得到并输出与该语音信号匹配的语音识别结果。
[0007]
更优选的是,上述智能语音识别遥控手术椅中:所述语音识别模块还包括滤波单元和增益单元;所述滤波单元位于接收单元和提取单元之间、用于对接收单元输出的语音信号进行高通滤波预处理;所述增益单元位于滤波单元与提取单元之间、用于对滤波单元输出的语音信号进行自动增益预处理。
[0008]
通过采用上述技术方案:在手术过程中,医生朝语音采集装置口述语音指令。语音采集装置采集该语音指令、生成语音信号并将该语音信号上传至语音识别模块;语音识别模块读取该语音信号并由接收单元输出、滤波单元对接收单元输出的语音信号进行高通滤波预处理、去除语音信号中的杂音成分;增益单元对滤波后的语音信号进行自动增益。提取
单元对经过滤波、增益后生成的语音信号中提取特征向量并将该特征向量输出至识别单元;识别单元通过预先训练的声学模型对提取单元输出的特征向量输入至声学模型中、得到并输出与该语音信号匹配的语音识别结果。此方案中,进行高通滤波和增益为优选项,其效果是滤除杂音,避免杂音对特征向量的提取产生干扰。控制命令模块用于读取语音识别模块输出的语音识别结果、对执行机构输出对应于该语音识别结果的控制指令、驱动执行机构工作;由执行机构实现手术椅本体的位移调整。由此在手术过程中以语音控制的方式实现对手术椅的位移微调。
[0009]
进一步优选的是,上述智能语音识别遥控手术椅中:所述手术椅本体包括椅背,椅座和旋转轴;所述椅背连接旋转轴、随旋转轴的转动而同步旋转;所述旋转轴固定于椅座上;所述执行机构包括微型电机;所述微型电机的输出端连接旋转轴、用于驱动旋转轴转动。
[0010]
通过采用这种技术方案:当微型电机收到控制指令时启动正转/反转,带动旋转轴旋转,间接驱动椅背相对于椅座的转动,由此实现了在手术过程中对椅背斜度进行微调控制的智能控制。针对医生在手术过程中略微前倾的坐姿实现为医生背部提供依托,减缓医生疲劳度。
[0011]
更进一步优选的是,上述智能语音识别遥控手术椅中:所述手术椅本体还包括两个腿部固定件;所述腿部固定件包括第一支柱,第二支柱和底盘;所述第一支柱的首端固定于椅座底部、尾端与第二支柱的首端铰接连接;所述第二支柱的尾端固定于底盘上;所述第一支柱上设有大腿固定件;所述第二支柱上设有小腿固定件。
[0012]
通过采用这种技术方案:医生坐在椅座上时,其大腿分别通过大腿固定件与第一支柱绑定,其小腿分别通过小腿固定件与第二支柱绑定。并通过底盘实现对手术椅本体的支撑。由此缓解使用者腿部和腰部的压力,使医生能够更加投入病人的治疗。
[0013]
更进一步优选的是,上述智能语音识别遥控手术椅中:所述执行机构还包括真空发生器,真空吸盘和微型气缸;所述真空吸盘安装于底盘上、用于实现底盘与地面间的固定/松开;所述真空发生器连接真空吸盘、用于调节真空吸盘的真空度;所述微型气缸的缸筒固定于第一支柱上,其活塞杆固定于第二支柱上。
[0014]
通过采用这种技术方案:设置真空发生器和真空吸盘相配合,当医生需要保持固定体位,通过控制真空吸盘内抽真空,将底盘牢固吸在地面上,而当医生需要调整体位,通过控制真空吸盘内进入空气,将底盘与地面分离。当需要调整第一支柱和第二支柱的夹角,控制微型气缸启动,伸出/缩回其活塞杆,从而增加/缩小第一支柱和第二支柱之间的夹角,最终实现对椅座高度的调整。
[0015]
更进一步优选的是,上述智能语音识别遥控手术椅中:所述椅座底部设有容置腔;所述语音识别模块和控制命令模块设于容置腔内。其中语音识别模块和控制命令模块可集成于一块控制电路板上。
[0016]
通过采用这种技术方案:移容置腔的外壁实现对语音识别模块和控制命令模块的保护,增加系统的稳定性。
[0017]
由此实现了在手术过程中对椅背斜度进行微调控制的智能控制。相对于现有技术,本发明能够在手术过程中以语音控制的方式实现对手术椅的位移微调,让手术医生坐位操作,以提升医生手术效率,操作便捷,增加手术安全系数。
附图说明
[0018]
下面结合附图与具体实施方式对本发明作进一步详细的说明:
[0019]
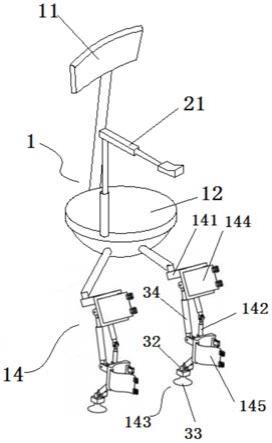
图1为实施例1的结构示意图,本图中省略了语音控制系统与执行机构之间的连线;
[0020]
图2为实施例1中语音控制系统的功能模块图;
[0021]
图3为微型电机与旋转轴的连接示意图。
[0022]
各附图标记与部件名称对应关系如下:
[0023]
1、手术椅本体;2、语音控制系统;3、执行机构;11、椅背;12、椅座;13、旋转轴;14、底座;15、支柱;21、语音采集装置;22、语音识别模块;23、控制命令模块;221、接收单元;222、提取单元;223识别单元;224、滤波单元;225、增益单元;31、微型电机;32、真空发生器;33、真空吸盘;34、微型气缸;121、容置腔;141、第一支柱;142、第二支柱;143、底盘;144、大腿固定件;145、小腿固定件。
具体实施方式
[0024]
为了更清楚地说明本发明的技术方案,下面将结合各个实施例作进一步描述。
[0025]
如图1-3所示:
[0026]
一种智能语音识别遥控手术椅,包括:手术椅本体1,语音控制系统2和执行机构3;
[0027]
其中,所述手术椅本体1包括椅背11,椅座12,旋转轴13和两个腿部固定件14。所述椅背11连接旋转轴13、随旋转轴13的转动而同步旋转;所述旋转轴13固定于椅座12上;所述腿部固定件14包括第一支柱141,第二支柱142和底盘143;所述第一支柱141的首端固定于椅座12底部、尾端与第二支柱142的首端铰接连接;所述第二支柱142的尾端固定于底盘143上;所述第一支柱141上设有大腿固定件144;所述第二支柱142上设有小腿固定件145。
[0028]
所述执行机构3包括微型电机31,真空发生器32,真空吸盘33和微型气缸34;所述微型电机31的输出端连接旋转轴13、用于驱动旋转轴13转动。所述真空吸盘33安装于底盘143上、用于实现底盘143与地面间的固定/松开;所述真空发生器32连接真空吸盘33、用于调节真空吸盘33的真空度;所述微型气缸34的缸筒固定于第一支柱141上,其活塞杆固定于第二支柱142上。
[0029]
所述语音控制系统2包括语音采集装置21,语音识别模块22和控制命令模块23;所述语音采集装置21用于采集现场语音、生成语音信号并将该语音信号输出至语音识别模块22;所述语音识别模块22和控制命令模块23设于容置腔121内。所述语音识别模块22用于读取语音采集装置21输出的语音信号、并输出匹配于该语音信号的语音识别结果。具体来说:所述语音识别模块22包括依序连接的接收单元221,提取单元222,识别单元223,滤波单元224和增益单元225。所述接收单元221用于接收由语音采集装置21输出的语音信号、并将该语音信号输出至提取单元222;所述滤波单元224位于接收单元221和提取单元222之间、用于对接收单元221输出的语音信号进行高通滤波预处理;所述增益单元225位于滤波单元224与提取单元222之间、用于对滤波单元224输出的语音信号进行自动增益预处理。所述提取单元222用于在经滤波和增益处理的语音信号中提取特征向量并将该特征向量输出至识别单元223;所述识别单元223中存有预先训练的声学模型、用于将提取单元222输出的特征向量输入至所述声学模型中、得到并输出与该语音信号匹配的语音识别结果。所述控制命
令模块23用于读取语音识别模块22输出的语音识别结果、分别对微型电机31,真空发生器32和微型气缸34输出对应的控制指令、实现对应的调整。在本例中,所述声学模型采用隐马儿可夫模型。
[0030]
实践中,其工作过程如下:
[0031]
在手术过程中,医生朝语音采集装置21口述语音指令。语音采集装置21采集该语音指令、生成语音信号并将该语音信号上传至语音识别系统2;语音识别模块22中的接收单元221读取该语音信号并输出、滤波单元224对接收单元221输出的语音信号进行高通滤波预处理、去除语音信号中的杂音成分;增益单元225对滤波后的语音信号进行自动增益克服滤波产生的负面影响。提取单元222对经过滤波、增益后生成的语音信号中提取特征向量并将该特征向量输出至识别单元223;识别单元223通过预先训练的声学模型对提取单元222输出的特征向量输入至声学模型中、得到并输出与该语音信号匹配的语音识别结果。控制命令模块23用于读取语音识别模块输出的语音识别结果、对执行机构3输出对应于该语音识别结果的控制指令、驱动执行机构工作;
[0032]
当医生需要调节椅背11的斜度时,口述用于调节微型电机31工作的预设语音指令,控制命令模块23对微型电机31输出对应的控制指令,微型电机31收到控制指令时启动正转/反转,带动旋转轴13旋转,间接驱动椅背11相对于椅座12转动,由此实现了在手术过程中对椅背11斜度进行微调控制的智能控制。
[0033]
当医生需要调节椅座12的高度时,口述用于调节微型气缸34工作的预设语音指令,控制微型气缸34启动,伸出/缩回其活塞杆,从而增加/缩小第一支柱和第二支柱之间的夹角,最终实现对椅座高度的调整。
[0034]
当医生需要将座椅进行整体移动时,口述调节真空发生器32工作的预设语音指令,真空发生器32控制真空吸盘33内进入空气,使得底盘143与地面分离。随后医生拖动座椅进行整体移动,移动完成后,再次口述调节真空发生器32工作的预设语音指令,真空发生器32控制真空吸盘33抽离空气,使得底盘143吸住地面,通过底盘实现对手术椅本体的支撑。由此缓解使用者腿部和腰部的压力,使医生能够更加投入病人的治疗。
[0035]
以上所述,仅为本发明的具体实施例,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1