用于验证解剖元素之间的机械耦合的系统、方法和装置与流程
本技术整体涉及用于验证解剖元素之间的机械耦合的系统、方法和装置,并且更具体地涉及使用惯性测量单元(imu)来验证解剖元素之间的机械耦合。
背景技术:
1、手术机器人可以辅助外科医生或其它医疗提供者执行手术过程,或者可以自主完成一个或多个手术过程。手术后,可能期望验证手术过程的成功。
技术实现思路
1、本公开的示例性方面包括:
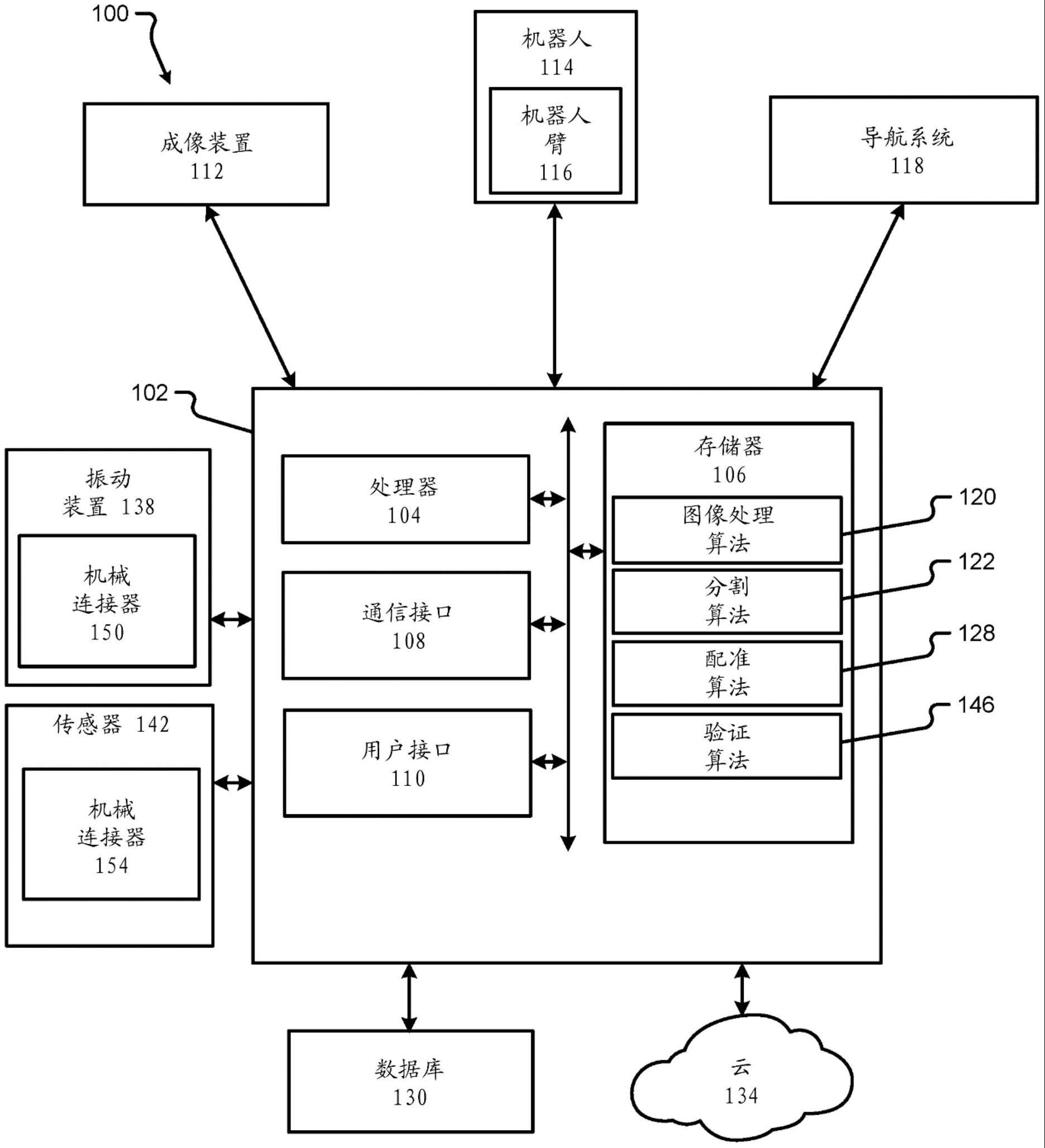
2、一种根据本公开的至少一个实施方案的装置包括:至少一个处理器;以及存储器,该存储器包括指令,这些指令在由该至少一个处理器执行时使该至少一个处理器进行以下操作:生成第一信号,该第一信号使振动装置振动,该振动装置与第一解剖元素传力接触;从传感器接收基于邻近该第一解剖元素的第二解剖元素中的感测振动的第二信号;以及基于该第二信号来确定该第二解剖元素和该第一解剖元素之间的机械耦合量。
3、在本文的任何方面中,其中该第一信号使该振动装置以第一振幅振动,并且其中该第二信号通过该第二解剖元素的振动以第二振幅生成。
4、在本文的任何方面中,其中该至少一个处理器通过以下方式确定该机械耦合量:确定该第一振幅和该第二振幅之间的差值;以及基于该差值来确定该机械耦合量。
5、在本文的任何方面中,其中这些指令包括使该至少一个处理器进行以下操作的指令:将该差值与多个阈值差值进行比较;以及基于该差值与该多个阈值差值的该比较来确定该机械耦合量,每个阈值差值与该第一解剖元素和该第二解剖元素之间的不同机械耦合量相关联;以及向用户接口输出该机械耦合量的指示。
6、在本文的任何方面中,其中这些指令包括使该至少一个处理器进行以下操作的指令:当该机械耦合量等于或高于阈值量时,确定该第二解剖元素机械耦合到该第一解剖元素,并且向该用户接口输出该第二解剖元素机械耦合到该第一解剖元素的第一指示;以及当该机械耦合量低于该阈值量时,确定该第二解剖元素未机械耦合到该第一解剖元素,并且向该用户接口输出该第二解剖元素未机械耦合到该第一解剖元素的第二指示。
7、在本文的任何方面中,其中这些指令包括使该至少一个处理器进行以下操作的指令:确定该第一解剖元素和该第二解剖元素之间的该机械耦合的至少一个属性。
8、在本文的任何方面中,其中该机械耦合的该至少一个属性识别形成该机械耦合的至少一种类型的连接解剖组织类型。
9、在本文的任何方面中,其中这些指令包括使该至少一个处理器进行以下操作的指令:基于该第一信号和该第二信号来确定该至少一种类型的连接解剖组织。
10、在本文的任何方面中,其中该第一信号具有第一频率并且该第二信号具有第二频率,并且其中这些指令包括使该至少一个处理器进行以下操作的指令:生成第三信号,该第三信号使该振动装置以具有第三振幅的第三频率振动该第一解剖元素,该第三频率不同于该第一频率;从该传感器接收基于由该第一解剖元素以该第三频率的该振动引起的该第二解剖元素的感测振动的在具有第四振幅的第四频率下的第四信号;以及基于该第一信号、该第二信号、该第三信号和该第四信号来确定该至少一种类型的连接解剖组织。
11、在本文的任何方面中,其中该至少一个处理器进行以下操作:基于该第一信号和该第二信号来确定该至少一种类型的连接解剖组织的第一类型;以及基于该第三信号和该第四信号来确定该至少一种类型的连接解剖组织的不同于该第一类型的第二类型。
12、在本文的任何方面中,其中该至少一种类型的连接解剖组织包括软组织、硬组织、疤痕组织、液体、肌肉或骨骼中的一者或多者。
13、在本文的任何方面中,其中这些指令包括使该至少一个处理器进行以下操作的指令:基于该第二解剖元素机械耦合到或未机械耦合到该第一解剖元素的该确定而生成用于机器人的至少一个控制信号。
14、一种根据本公开的各方面的系统包括:振动装置,该振动装置被配置为提供振动;传感器,该传感器被配置为感测振动;至少一个处理器;以及存储器,该存储器包括指令,这些指令在由该至少一个处理器执行时使该至少一个处理器进行以下操作:生成第一信号,该第一信号使该振动装置振动,该振动装置与第一解剖元素传力接触;从该传感器接收基于邻近该第一解剖元素的第二解剖元素中的感测振动的第二信号;以及基于该第二信号来确定该第二解剖元素和该第一解剖元素之间的机械耦合量。
15、在本文的任何方面中,其中该振动装置被配置为机械连接到该第一解剖元素。
16、在本文的任何方面中,其中该传感器被配置为机械连接到该第二解剖元素。
17、在本文的任何方面中,其中该第一解剖元素或该第二解剖元素中的一者包括骨骼,并且其中该第一解剖元素或该第二解剖元素中的另一者包括神经。
18、在本文的任何方面中,其中该骨骼包括椎骨并且该神经包括脊神经。
19、在本文的任何方面中,其中该第一解剖元素和该第二解剖元素包括脊柱的部分,并且其中该至少一个处理器基于该机械耦合量来确定脊柱减压量。
20、在本文的任何方面中,还包括:至少一个机器人,该至少一个机器人被配置为改变该机械耦合量以使该脊柱减压量更接近目标量。
21、根据本公开的一方面的方法包括:生成第一信号,该第一信号使振动装置振动,该振动装置与第一解剖元素传力接触;从传感器接收基于邻近该第一解剖元素的第二解剖元素的感测振动的第二信号;基于该第二信号来确定该第一解剖元素和该第二解剖元素之间的机械耦合量;以及控制机器人以基于该第一解剖元素和该第二解剖元素之间的目标机械耦合量来改变该机械耦合量。
22、任何方面与任一个或多个其他方面组合。
23、本文所公开特征中的任一个或多个。
24、本文大体上公开特征中的任一个或多个。
25、本文大体上公开的特征中的任一个或多个与本文大体上公开的任一个或多个其他特征组合。
26、方面/特征/实施方案中的任一个与任一个或多个其他方面/特征/实施方案组合。
27、使用本文所公开的方面或特征中的任一个或多个。
28、应当了解,本文所述的任何特征可与如本文所述的任何其他特征组合来要求保护,而不管特征是否来自同一描述的实施方案。
29、本公开的一个或多个方面的细节在以下附图和描述中阐述。根据说明书和附图以及权利要求书,本公开中描述的技术的其他特征、目的和优点将是显而易见的。
30、短语“至少一个”、“一个或多个”以及“和/或”是在操作中具有连接性和分离性两者的开放式表述。例如,表述“a、b和c中的至少一个”、“a、b或c中的至少一个”、“a、b和c中的一个或多个”、“a、b或c中的一个或多个”以及“a、b和/或c”中一者意指仅a、仅b、仅c、a和b一起、a和c一起、b和c一起,或a、b和c一起。当上述表述中的a、b和c中的每一者都指诸如x、y和z的一个元素或诸如x1-xn、y1-ym和z1-zo的一类元素时,短语意图指选自x、y和z的单个元素、选自同一类的元素(例如,x1和x2)的组合以及选自两类或更多类的元素(例如,y1和zo)的组合。
31、术语“一(a/an)”实体是指一个或多个该实体。因此,术语“一(a/an)”、“一个或多个”和“至少一个”在本文中可以可互换地使用。还应当注意,术语“包括(comprising/including)”、和“具有”可以可互换地使用。
32、前述内容是本公开的简化概述以提供对本公开的一些方面的理解。本
技术实现要素:
既不是对本公开及其各个方面、实施方案和配置的广泛性概述也不是详尽性概述。其既不意图确定本公开的关键或重要元素,也不意图划定本公开的范围,而是以简化形式呈现本公开的选定概念,作为对下文呈现的更详细描述的介绍。如应当了解的,本公开的其他方面、实施方案和配置可能单独或组合地利用上文所阐述或下文所详细描述的特征中的一个或多个。
33、在考虑下文提供的实施方案描述之后,本发明的许多额外特征和优点对于本领域技术人员将变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!