全自动锁的制作方法
[0001]
本实用新型涉及智能锁具技术领域,特别是涉及一种全自动锁。
背景技术:
[0002]
智能锁是指区别于传统机械锁,是具有安全性,便利性,先进技术的复合型锁,现有的智能锁很少能够全自动的解锁,通常都是在验证后通过转动执手来使主锁舌缩回锁体内。此外,现有的智能锁内部结构复杂,且存在使用稳定性、安全性差的问题。
技术实现要素:
[0003]
本实用新型针对上述问题,克服至少一个不足,提出了一种全自动锁。
[0004]
本实用新型采取的技术方案如下:
[0005]
一种全自动锁,包括锁壳组件,所述锁壳组件上安装有:
[0006]
锁舌的锁定与解锁机构;
[0007]
主锁舌,滑动设置在所述锁壳组件上,主锁舌包括锁舌部以及定位部;
[0008]
传动机构,用于与锁舌的锁定与解锁机构配合,使锁舌的锁定与解锁机构解锁,还用于与主锁舌配合,使锁舌部穿出锁壳组件或缩回锁壳组件;所述传动机构包括驱动件和主锁舌拨块,所述驱动件转动安装在锁壳组件上,所述主锁舌拨块转动安装在锁壳组件上,且与所述驱动件配合,驱动件能够带动主锁舌拨块转动,所述主锁舌拨块具有与主锁舌的定位部配合的第一传动部,主锁舌拨块转动时,通过所述第一传动部能够带动主锁舌滑动,使锁舌部穿出锁壳组件或缩回锁壳组件;所述驱动件上还具有第一凸部,在驱动件带动主锁舌拨块转动使主锁舌缩回锁壳组件的动作时,所述第一凸部用于与所述锁舌的锁定与解锁机构配合,解锁锁舌的锁定与解锁机构;
[0009]
电动驱动机构,用于驱动所述驱动件转动。
[0010]
通过电动驱动机构能够驱动驱动件转动,从而能够使第一传动部同步转动,在第一传动部的作用下,能够带动主锁舌穿出锁壳组件或缩回锁壳组件。
[0011]
在关门状态下,除了需要打开主锁舌,还需要解锁锁舌的锁定与解锁机构,本申请在驱动件带动主锁舌拨块转动使主锁舌缩回锁壳组件的动作时,驱动件的第一凸部能够与锁舌的锁定与解锁机构配合,解锁锁舌的锁定与解锁机构,从而可以实现开门操作。本申请的传动机构结构简单可靠。
[0012]
于本实用新型其中一实施例中,所述定位部具有第一凹口,所述第一凹口具有第一侧壁和第二侧壁,且第一侧壁靠近锁舌部,第二侧壁远离锁舌部,所述第一传动部与所述第一凹口配合,通过第一凹口带动主锁舌滑动,当主锁舌的锁舌部穿出锁壳组件时,所述第一传动部与所述第一侧壁相抵接,当主锁舌的锁舌部缩回锁壳组件时,所述第一传动部与所述第二侧壁相抵接;所述第二侧壁具有缓冲区,在主锁舌的锁舌部缩回锁壳组件后,所述第一传动部还能够在缓冲区继续转动;当驱动件带动第一传动部转动,使锁舌部缩回锁壳组件后,驱动件继续转动,第一传动部在缓冲区空转的同时,所述第一凸部与锁舌的锁定与
解锁机构配合,解锁锁舌的锁定与解锁机构。
[0013]
第二侧壁设置的缓冲区是为了提供第一凸部和锁舌的锁定与解锁机构配合的时间,从而实现在解锁主锁舌的时候锁舌的锁定与解锁机构不会解锁,有效保证主锁舌可靠的滑入锁壳组件内。
[0014]
实际运用时,缓冲区可以为弧形面。
[0015]
于本实用新型其中一实施例中,所述主锁舌拨块与驱动件具有相同的转动轴线,主锁舌拨块与驱动件之间具有空转结构;
[0016]
所述空转结构包括设置在主锁舌拨块上的第一配合块以及设置在驱动件上的第二配合块,主锁舌拨块能够相对驱动件空转设定角度,当驱动件转动,使第二配合块与第一配合块相抵靠时,驱动件继续同方向转动能够带动主锁舌拨块同步转动;
[0017]
当主锁舌的锁舌部穿出锁壳组件后,所述驱动件能够复位,当主锁舌拨块被其他机构驱动,主锁舌拨块能够相对驱动件空转并解锁主锁舌;
[0018]
全自动锁还包括机械开锁机构,所述机械开锁机构用于在锁舌部穿出锁壳组件的状态下,驱动所述主锁舌拨块空转使锁舌部缩回锁壳组件。
[0019]
设置空转结构能够在通过机械开锁机构工作时,使主锁舌拨块不与驱动件产生作用力,保证机械开锁机构的可靠顺利的工作。
[0020]
于本实用新型其中一实施例中,所述机械开锁机构包括:
[0021]
机械拨块,转动安装所述锁壳组件上,机械拨块上具有插槽,机械拨块具有第一驱动部和第二驱动部;
[0022]
第二拨片,转动安装所述锁壳组件上,所述第二拨片的一端与所述第一驱动部配合,另一端与所述主锁舌拨块配合,机械拨块转动,通过第一驱动部能够带动第二拨片转动,第二拨片转动带动主锁舌拨块空转,对主锁舌进行解锁操作,所述第二驱动部用于在第二拨片带动主锁舌拨片解锁主锁舌后,与锁舌的锁定与解锁机构配合,解锁锁舌的锁定与解锁机构。
[0023]“主锁舌拨块解锁主锁舌时”,指的是主锁舌拨块带动主锁舌向锁壳组件内滑动。
[0024]
插槽能够与杆件配合,比如方杆,通过方杆能够带动机械拨块转动,实际运用时,门内的执手可以通过方杆驱动机械拨块转动。实际运用时,所述机械开锁机构还包括第一复位弹性件。
[0025]
于本实用新型其中一实施例中,所述锁舌的锁定与解锁机构包括:
[0026]
锁舌组件,滑动设置在所述锁壳组件上,锁舌组件包括连接块以及转动安装在连接块上的锁舌;
[0027]
锁舌组件复位件,安装在锁壳组件上,用于与锁舌组件配合,使锁舌组件的锁舌穿出所述锁壳组件;
[0028]
限位件,转动安装在所述锁壳组件上,所述限位件具有第一配合部和第二配合部,限位件具有限位工作位和解锁工作位,当限位件处于限位工作位时,所述配合部用于与连接块相抵接,限制锁舌组件向锁壳组件内侧移动,当限位件处于解锁工作位时,所述配合部不再限定连接块,锁舌组件能够向锁壳组件内侧移动,所述限位件在不受外力时能够复位至限位工作位;
[0029]
斜锁舌组件,滑动设置在所述锁壳组件上,斜锁舌组件包括连接件以及转动安装
在连接件上的斜锁舌,所述连接件具有抵压部,所述抵压部用于与所述第二配合部配合;
[0030]
斜锁舌复位件,安装在锁壳组件上,用于与斜锁舌组件配合,使斜锁舌组件的斜舌穿出所述锁壳组件,当斜锁舌组件的斜舌穿出所述锁壳组件时,所述抵压部与第二配合部抵靠,驱动所述限位件转动至解锁工作位;
[0031]
第一拨片,活动设置在锁壳组件上,所述第一拨片用于与限位件抵接配合,通过第一拨片的活动能够使限位件从限位工作位转动至解锁工作位;所述第一拨片具有第一受压部和第二受压部,所述第一凸部用于与第一受压部配合,所述第二驱动部用于与所述第二受压部配合,第一受压部或第二受压部受压移动后能够向限位件一侧移动,使限位件切换至解锁工作位。
[0032]
锁舌的锁定与解锁机构的工作原理:在关门状态下,斜锁舌组件是被压入锁壳组件上的,此时斜锁舌组件不限定限位件,限位件处于限位工作位,也就是第一配合部能够与连接块相抵接,限制锁舌组件向锁壳组件内侧移动,即锁舌被锁住不能缩回锁壳组件,当第一拨片受力活动时,能够触发限位件,使限位件转动至解锁工作位,此时第一配合部不再限定连接块,锁舌组件能够向锁壳组件内侧移动。此外,即便在开门状态下,误按动斜锁舌组件(使斜锁舌缩回锁壳组件),当释放后,斜锁舌组件在斜锁舌复位件的作用下能够复位,自动使限位件转动至解锁工作位,这种配合形式大大提高了稳定性,不怕误操作。
[0033]
本申请的锁舌的锁定与解锁机构锁定与解锁过程简单,可靠性和稳定性好。
[0034]
于本实用新型其中一实施例中,所述锁舌的锁定与解锁机构还包括安装在锁壳组件上的限位件复位件,所述限位件复位件用于与限位件配合,使限位件在不受外力时能够复位至限位工作位;所述第一拨片滑动安装在锁壳组件上。
[0035]
限位件复位件能够提供力使限位件复位,保证限位件的可靠工作。
[0036]
于本实用新型其中一实施例中,还包括用于控制电动驱动机构工作的控制板,所述传动机构还包括定位组件,所述定位组件包括:
[0037]
定位齿轮,转动安装在锁壳组件上,与所述驱动件啮合,定位齿轮上具有触发部;
[0038]
定位传感器,设置锁壳组件上,与所述控制板电连接,所述定位传感器用于感知所述触发部,所述定位传感器为微动开关、霍尔开关或光电开关。
[0039]
通过设置定位齿轮、定位传感器能够可靠的判断驱动件的位置,从而保证当主锁舌的锁舌部穿出锁壳组件后,所述驱动件能够精确复位。定位组件采用这种结构形式,相对于其他方式而言,精度和可靠性更高,且装配调试也更为方便。本实施例中,触发部为第二凸部,实际运用还可以为其他结构。
[0040]
于本实用新型其中一实施例中,所述驱动件为驱动齿轮,所述电机驱动机构包括驱动电机,所述驱动电机直接或通过齿轮结构驱动所述驱动件转动。
[0041]
实际运用时,电动驱动机构可以包括传动齿轮,传动齿轮包括第一锥齿以及与驱动件啮合的第一齿,所述驱动电机的输出轴上具有与所述第一锥齿啮合的第二锥齿。
[0042]
于本实用新型其中一实施例中,传动机构还包括助力扭簧,所述助力扭簧用于在主锁舌拨块经过临界点后辅助主锁舌穿出锁壳组件或缩回锁壳组件。
[0043]
于本实用新型其中一实施例中,还包括保险锁舌机构,所述保险锁舌机构包括保险锁舌、保险锁定位块、保险锁锁定机构及保险锁复位弹簧,所述保险锁舌可穿过所述锁壳组件;所述保险锁定位块的一端与所述保险锁舌相连接,另一端与所述保险锁复位弹簧相
连接,且所述保险锁定位块可相对于所述锁壳组件移动;所述保险锁锁定机构装设于所述锁壳组件内,并与所述保险锁定位块进行传动配合。
[0044]
本实用新型的有益效果是:通过电动驱动机构能够驱动驱动件转动,从而能够使第一传动部同步转动,在第一传动部的作用下,能够带动主锁舌穿出锁壳组件或缩回锁壳组件。
附图说明:
[0045]
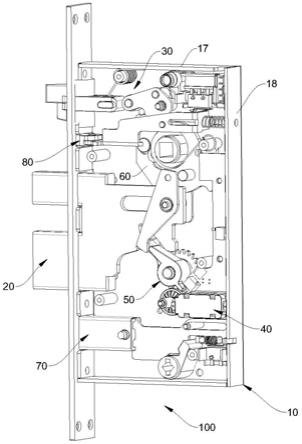
图1为本实用新型一实施例的一种全自动锁的结构示意图;
[0046]
图2为图1所示全自动锁另一视角的结构示意图;
[0047]
图3为图2所示锁壳组件相适配的扣板结构示意图;
[0048]
图4为图1所示全自动锁的部分结构示意图;
[0049]
图5为图1所示主锁舌机构的结构示意图;
[0050]
图6为图1所示全自动锁的部分结构示意图;
[0051]
图7为图1所示全自动锁的部分结构示意图;
[0052]
图8为图1所示双向锁舌机构的结构示意图;
[0053]
图9为图1所示双向锁舌机构的结构示意图;
[0054]
图10为图9所示限位件的结构示意图;
[0055]
图11为图9所示斜锁舌连接件的结构示意图;
[0056]
图12为装设有全自动锁的门开启后全自动锁的状态图;
[0057]
图13为锁舌全收回时全自动锁的状态图;
[0058]
图14为装设有全自动锁的门处于锁闭状态时全自动锁的状态图;
[0059]
图15为使用插芯进行解锁开门时全自动锁的状态图;
[0060]
图16是锁壳组件隐藏部分结构后的示意图;
[0061]
图17是驱动件、主锁舌拨块以及定位组件的示意图;
[0062]
图18是主锁舌和主锁舌拨块的示意图。
[0063]
图中各附图标记为:
[0064]
100、全自动锁;10、锁壳组件;11、主锁舌通孔;12、第二柱体;13、第一限位柱体;14、双向锁舌通孔;15、斜锁舌通孔;16、保险锁舌通孔;17、第一侧面;18、第二侧面;19、第六柱体;20、主锁舌;21、锁舌部;22、定位部;221、第一凹口;222、第一滑动开孔;223、第一侧壁;224、第二侧壁;2241、缓冲区;30、锁舌的锁定与解锁机构;31、锁舌;3211、连接块;3212、限位件;3213、第一限位板;3214、第一配合部;3215、第二限位板;3216、第二配合部;3217、限位抵接部;3218、传动抵接部;322、连接件;3221、抵压部;3222、弹簧连接部;323、斜锁舌复位件;324、锁舌组件复位件;3242、限位件复位件;40、电动驱动机构;41、驱动电机;42、第二锥齿;43、机械拨块;431、插槽;441、贯穿孔;45、第一复位弹性件;46、第一驱动部;47、第四柱体;50、传动机构;51、第一柱体;52、转轴;53、传动齿轮;54、主锁舌拨动轴;55、驱动件;551、第一凸部;56、主锁舌拨块;561、第一传动部;562、限位部;57、第二拨片;571、曲部;60、第一拨片;70、保险锁舌机构;71、保险锁舌;72、保险锁定位块;73、保险锁锁定机构;731、保险锁拨块;732、第二插槽;733、保险锁传动件;74、保险锁复位弹簧;80、斜锁舌;90、扣板;91、主锁舌对应孔;92、双向锁舌对应孔;93、保险舌对应孔;101、第一受压部;102、第二受压
部;103、微动开关;104、第一配合块;105、第二配合块;106、第二驱动部;107、定位齿轮;108、定位传感器;109、触发部;110、第一锥齿;111、第一齿;112、助力扭簧;113、控制板。
具体实施方式:
[0065]
下面结合各附图,对本实用新型做详细描述。
[0066]
如图1~18所示,一种全自动锁100,包括锁壳组件10,锁壳组件10上安装有:
[0067]
锁舌的锁定与解锁机构30;
[0068]
主锁舌20,滑动设置在锁壳组件10上,主锁舌20包括锁舌部21以及定位部22;
[0069]
传动机构50,用于与锁舌的锁定与解锁机构30配合,使锁舌的锁定与解锁机构30解锁,还用于与主锁舌20配合,使锁舌部21穿出锁壳组件10或缩回锁壳组件10;传动机构50包括驱动件55和主锁舌拨块56,驱动件55转动安装在锁壳组件10上,主锁舌拨块56转动安装在锁壳组件10上,且与驱动件55配合,驱动件55能够带动主锁舌拨块56转动,主锁舌拨块56具有与主锁舌20的定位部22配合的第一传动部561,主锁舌拨块56转动时,通过第一传动部561能够带动主锁舌20滑动,使锁舌部21穿出锁壳组件10或缩回锁壳组件10;驱动件55上还具有第一凸部551,在驱动件55带动主锁舌拨块56转动使主锁舌20缩回锁壳组件10的动作时,第一凸部551用于与锁舌的锁定与解锁机构30配合,解锁锁舌的锁定与解锁机构30;
[0070]
电动驱动机构40,用于驱动驱动件55转动。
[0071]
通过电动驱动机构40能够驱动驱动件55转动,从而能够使第一传动部561同步转动,在第一传动部561的作用下,能够带动主锁舌20穿出锁壳组件10或缩回锁壳组件10。
[0072]
在关门状态下,除了需要打开主锁舌20,还需要解锁锁舌的锁定与解锁机构30,本申请在驱动件55带动主锁舌拨块56转动使主锁舌20缩回锁壳组件10的动作时,驱动件55的第一凸部551能够与锁舌的锁定与解锁机构30配合,解锁锁舌的锁定与解锁机构30,从而可以实现开门操作。本申请的传动机构50结构简单可靠。
[0073]
如图18所示,于本实施例中,定位部22具有第一凹口221,第一凹口221具有第一侧壁223和第二侧壁224,且第一侧壁223靠近锁舌部21,第二侧壁224远离锁舌部21,第一传动部561与第一凹口221配合,通过第一凹口221带动主锁舌20滑动,当主锁舌20的锁舌部21穿出锁壳组件10时,第一传动部561与第一侧壁223相抵接,当主锁舌20的锁舌部21缩回锁壳组件10时,第一传动部561与第二侧壁224相抵接;第二侧壁224具有缓冲区2241,在主锁舌20的锁舌部21缩回锁壳组件10后,第一传动部561还能够在缓冲区2241继续转动;当驱动件55带动第一传动部561转动,使锁舌部21缩回锁壳组件10后,驱动件55继续转动,第一传动部561在缓冲区2241空转的同时,第一凸部551与锁舌的锁定与解锁机构30配合,解锁锁舌的锁定与解锁机构30。
[0074]
第二侧壁224设置的缓冲区2241是为了提供第一凸部551和锁舌的锁定与解锁机构30配合的时间,从而实现在解锁主锁舌20的时候锁舌的锁定与解锁机构30不会解锁,有效保证主锁舌20可靠的滑入锁壳组件10内。实际运用时,缓冲区2241可以为弧形面。
[0075]
如图17所示,于本实施例中,主锁舌拨块56与驱动件55具有相同的转动轴线,主锁舌拨块56与驱动件55之间具有空转结构;
[0076]
空转结构包括设置在主锁舌拨块56上的第一配合块104以及设置在驱动件55上的第二配合块105,主锁舌拨块56能够相对驱动件55空转设定角度,当驱动件55转动,使第二
配合块105与第一配合块104相抵靠时,驱动件55继续同方向转动能够带动主锁舌拨块56同步转动;
[0077]
当主锁舌20的锁舌部21穿出锁壳组件10后,驱动件55能够复位,当主锁舌拨块56被其他机构驱动,主锁舌拨块56能够相对驱动件55空转并解锁主锁舌20;
[0078]
全自动锁还包括机械开锁机构,机械开锁机构用于在锁舌部21穿出锁壳组件10的状态下,驱动主锁舌拨块56空转使锁舌部21缩回锁壳组件10。
[0079]
设置空转结构能够在通过机械开锁机构工作时,使主锁舌拨块56不与驱动件55产生作用力,保证机械开锁机构的可靠顺利的工作。
[0080]
如图16所示,于本实施例中,机械开锁机构包括:
[0081]
机械拨块43,转动安装锁壳组件10上,机械拨块43上具有插槽431,机械拨块43具有第一驱动部46和第二驱动部106;
[0082]
第二拨片57,转动安装锁壳组件10上,第二拨片57的一端与第一驱动部46配合,另一端与主锁舌拨块56配合,机械拨块43转动,通过第一驱动部46能够带动第二拨片57转动,第二拨片57转动带动主锁舌拨块56空转,对主锁舌20进行解锁操作,第二驱动部106用于在第二拨片57带动主锁舌20拨片解锁主锁舌20后,与锁舌的锁定与解锁机构30配合,解锁锁舌的锁定与解锁机构30。
[0083]“主锁舌拨块56解锁主锁舌20时”,指的是主锁舌拨块56带动主锁舌20向锁壳组件10内滑动。
[0084]
插槽431能够与杆件配合,比如方杆,通过方杆能够带动机械拨块43转动,实际运用时,门内的执手可以通过方杆驱动机械拨块43转动。实际运用时,机械开锁机构还包括第一复位弹性件45。
[0085]
如图1~15所示,于本实施例中,锁舌的锁定与解锁机构30包括:
[0086]
锁舌组件,滑动设置在锁壳组件10上,锁舌组件包括连接块3211以及转动安装在连接块3211上的锁舌31;
[0087]
锁舌组件复位件324,安装在锁壳组件10上,用于与锁舌组件配合,使锁舌组件的锁舌穿出锁壳组件10;
[0088]
限位件3212,转动安装在锁壳组件10上,限位件3212具有第一配合部3214和第二配合部3216,限位件3212具有限位工作位和解锁工作位,当限位件3212处于限位工作位时,配合部用于与连接块3211相抵接,限制锁舌组件向锁壳组件10内侧移动,当限位件3212处于解锁工作位时,配合部不再限定连接块3211,锁舌组件能够向锁壳组件10内侧移动,限位件3212在不受外力时能够复位至限位工作位;
[0089]
斜锁舌组件,滑动设置在锁壳组件10上,锁舌组件包括连接件322以及转动安装在连接件322上的斜锁舌80,连接件322具有抵压部3221,抵压部3221用于与第二配合部3216配合;
[0090]
斜锁舌复位件323,安装在锁壳组件10上,用于与斜锁舌组件配合,使斜锁舌组件的斜舌穿出锁壳组件10,当斜锁舌组件的斜舌穿出锁壳组件10时,抵压部3221与第二配合部3216抵靠,驱动限位件3212转动至解锁工作位。
[0091]
如图16所示,锁舌的锁定与解锁机构30还包括第一拨片60,第一拨片60活动设置在锁壳组件10上,第一拨片60用于与限位件3212抵接配合,通过第一拨片60的活动能够使
限位件3212从限位工作位转动至解锁工作位;第一拨片60具有第一受压部101和第二受压部102,第一凸部551用于与第一受压部101配合,第二驱动部106用于与第二受压部102配合,第一受压部101或第二受压部102受压移动后能够向限位件3212一侧移动,使限位件3212切换至解锁工作位。
[0092]
锁舌的锁定与解锁机构30的工作原理:在关门状态下,斜锁舌组件是被压入锁壳组件10上的,此时斜锁舌组件不限定限位件3212,限位件3212处于限位工作位,也就是第一配合部3214能够与连接块3211相抵接,限制锁舌组件向锁壳组件10内侧移动,即锁舌31被锁住不能缩回锁壳组件10,当第一拨片60受力活动时,能够触发限位件3212,使限位件3212转动至解锁工作位,此时第一配合部3214不再限定连接块3211,锁舌组件能够向锁壳组件10内侧移动。此外,即便在开门状态下,误按动斜锁舌组件(使斜锁舌80缩回锁壳组件10),当释放后,斜锁舌组件在斜锁舌复位件323的作用下能够复位,自动使限位件3212转动至解锁工作位,这种配合形式大大提高了稳定性,不怕误操作。
[0093]
本申请的锁舌的锁定与解锁机构30锁定与解锁过程简单,可靠性和稳定性好。
[0094]
于本实施例中,锁舌的锁定与解锁机构30还包括安装在锁壳组件10上的限位件复位件3242,限位件复位件3242用于与限位件3212配合,使限位件3212在不受外力时能够复位至限位工作位;第一拨片60滑动安装在锁壳组件10上。限位件复位件3242能够提供力使限位件3212复位,保证限位件3212的可靠工作。
[0095]
于其他实施例中,于本实施例中,限位件3212的重心不在限位件3212的转动轴线上,限位件3212能够通过自身重力复位至限位工作位。这种方式能够省略限位件复位件3242,能够简化结构。
[0096]
于本实施例中,锁舌组件复位件324为弹簧或扭簧;限位件复位件3242为弹簧或扭簧;斜锁舌复位件323为弹簧或扭簧。
[0097]
于本实施例中,第一配合部3214为转动安装在限位件3212上的转动轴。第一配合部3214为转动轴,这种方式能够降低摩擦力,方便第一配合部3214的位置切换。
[0098]
于本实施例中,锁舌31为双向锁舌31。
[0099]
于本实施例中,还包括安装在锁壳组件10上的微动开关103,微动开关103用于与限位件3212或连接件322配合。
[0100]
如图17所示,于本实施例中,还包括用于控制电动驱动机构40工作的控制板113,传动机构50还包括定位组件,定位组件包括:
[0101]
定位齿轮107,转动安装在锁壳组件10上,与驱动件55啮合,定位齿轮107上具有触发部109;
[0102]
定位传感器108,设置锁壳组件10上,与控制板113电连接,定位传感器108用于感知触发部109,定位传感器108为微动开关103、霍尔开关或光电开关。
[0103]
通过设置定位齿轮107、定位传感器108能够可靠的判断驱动件55的位置,从而保证当主锁舌20的锁舌部21穿出锁壳组件10后,驱动件55能够精确复位。定位组件采用这种结构形式,相对于其他方式而言,精度和可靠性更高,且装配调试也更为方便。本实施例中,触发部109为第二凸部,实际运用还可以为其他结构。
[0104]
于本实施例中,驱动件55为驱动齿轮,电机驱动机构包括驱动电机41,驱动电机41直接或通过齿轮结构驱动驱动件55转动。如图16所示,本实施例中,电动驱动机构40可以包
括传动齿轮53,传动齿轮53包括第一锥齿110以及与驱动件55啮合的第一齿111,驱动电机41的输出轴上具有与第一锥齿110啮合的第二锥齿42。
[0105]
如图16所示,于本实施例中,传动机构50还包括助力扭簧112,助力扭簧112用于在主锁舌拨块56经过临界点后辅助主锁舌20穿出锁壳组件10或缩回锁壳组件10。
[0106]
如图11、12和14所示,于本实施例中,还包括保险锁舌机构70,保险锁舌机构包括保险锁舌71、保险锁定位块72、保险锁锁定机构73及保险锁复位弹簧74,保险锁舌71可穿过锁壳组件10;保险锁定位块的一端与保险锁舌相连接,另一端与保险锁复位弹簧相连接,且保险锁定位块可相对于锁壳组件10移动;保险锁锁定机构装设于锁壳组件10内,并与保险锁定位块进行传动配合。
[0107]
如图11所示,保险锁锁定机构73包括:保险锁拨块731、第二插槽732及保险锁传动件733;保险锁拨块731装设在锁壳组件10上,并能够相对锁壳组件10转动;第二插槽732开设在保险锁拨块731上,用于供外部插芯插入并转动保险锁拨块731;保险锁传动件733套设在保险锁拨块731上,当用户使用插芯转动保险锁拨块731时,保险锁传动件733被带动,并与保险锁定位块72进行传动配合。
[0108]
如图2和3所示,锁壳组件10朝向外部门框的侧面开设有主锁舌通孔11、双向锁舌通孔14、斜锁舌通孔15及保险锁舌通孔16;与该锁壳组件10相适配的扣板90装设在外部门框上,在该扣板90开设有:与主锁舌通孔11相适配的主锁舌对应孔91、与双向锁舌通孔14相适配的双向锁舌对应孔92以及与保险锁舌通孔16相适配的保险锁舌对应孔93。
[0109]
可以理解的是,扣板90上未开设与斜锁舌80相适配的开孔,即:当装设有该全自动锁100的门处于关闭状态时,斜锁舌90被挤压至锁壳组件10内部。另外,锁壳组件10是由面板(图未标)及锁壳(图未标)构成。
[0110]
如图4和5所示,锁壳组件10内部装有第二柱体12;定位块22具有第一滑动开孔222。第一滑动开孔222套设在第二柱体12处,以便于基于第一滑动孔222与第二柱体12之间的限位配合,限定连接块22的移动方向及范围。
[0111]
如图9所示,限位件3212包括:第一限位板3213和第二限位板3215,第一限位板3213与第二限位板3215之间安装有第一配合部3214。其中,第一限位板3213朝向连接件322的一侧形成有第二配合部3216,该第二配合部3216与连接件322进行传动配合。
[0112]
其中,第二限位板3215朝向连接件322一侧形成有限位抵接部3217及传动抵接部3218,该限位抵接部3217与锁壳组件10内部所形成的凸体(图未标)进行抵接配合以限定限位件3212的转动范围,即:限位件3212朝向连接件322所在方位转动时,将使限位抵接部3217与装设在锁壳组件10内的凸体相抵接,并使限位件3212停止转动。第一拨片60朝向限位件3212移动过程中,将与传动抵接部3218相抵接,也可推动传动抵接部3218以使限位件3212转动,进而令限位件3212左侧端部与连接块3211的右侧端部相错开。
[0113]
另外,在锁壳组件10上设置有第一限位柱体13,该第一限位柱体13位于第二限位板3215背向第一侧面17的一侧。在限位件3212朝向第一拨片60转动时,第二限位板3215可与第一限位柱体13相抵接,并阻止限位件3212继续转动,起到限定限位件3212转动范围的作用。
[0114]
如图10所示,连接件322上形成有弹簧连接部3222,连接件322通过该弹簧连接部3222与斜锁舌复位件323相连接。斜锁舌复位件323为复位弹簧,其一端与连接件322相连
接,另一端连接在锁壳组件10的第二侧面18位置处。
[0115]
如图6所示,限位件3212装设在锁壳组件的第六柱体19处,并能够绕该第六柱体19转动。
[0116]
如图7所示,第一复位弹性件的一端与第四柱体47相连接,另一端与机械拨块上的贯穿孔441相勾合。
[0117]
如图4所示,传动机构50还包括:第一柱体51、转轴52以及主锁舌拨动轴54。
[0118]
如图4所示,第二拨片57具有曲部571,第二拨片57的曲部571与主锁舌拨块56相抵接并带动主锁舌拨块56转动。
[0119]
如图4所示,主锁舌拨块56具有限位部562,限位部562可与安装在锁壳组件10内的第二凸部(图未标)相抵持,从而阻止主锁舌拨块56继续转动。
[0120]
下面以全自动锁100的锁定过程为例,可详述如下:
[0121]
1、如图12所示,当装设有全自动锁100的门处于开启状态时,锁舌31及斜锁舌80伸出锁壳组件10,锁舌部21及保险锁舌71位于锁壳组件10内部;具体的:
[0122]
锁舌部21位于锁壳组件10内部,主锁舌拨块56的第一传动部561与第一凹口221的第二侧壁相抵接;
[0123]
锁舌31完全伸出锁壳组件10,连接块3211的一端与锁壳组件10侧面相接触,限位件3212的第一配合部不再限定连接块3211;
[0124]
斜锁舌80完全伸出锁壳组件10,连接件322远离第二侧面18,抵压部3221与第一抵接部3216相抵持;
[0125]
保险锁舌71位于锁壳组件10内部,保险锁定位块72的一端靠近第二侧面18,第五柱体75位于第二滑动开孔722的左侧,保险锁拨块731的端部与第二凹口721靠近第二侧面18的端部相抵接,保险锁复位弹簧74处于松弛状态。
[0126]
2、用户关门时,锁舌31、斜锁舌80受到门框的挤压,将回缩至锁壳组件10内部,如图13所示。具体过程如下:
[0127]
锁舌31受到门框的作用力朝向锁壳组件10内部移动,并带动连接块3211朝向第二侧面18移动,最终状态为双向锁舌31位于锁壳组件10内部;
[0128]
斜锁舌80受到门框的作用力朝向锁壳组件10内部移动,并带动连接件322朝向第二侧面18移动,斜锁舌复位件323处于压缩状态,抵压部3221未与第二配合部3216相接触。
[0129]
3、门完全闭合时,主锁舌21、锁舌31及保险锁舌71均处于锁定状态,如图14所示。具体过程如下:
[0130]
当门完全闭合时,锁舌31正对于双向锁舌对应孔91,作用于双向锁舌31的外力消失;锁舌组件复位件324基于自身形变所产生的作用力推动连接块3211朝向左侧移动,并带动双向锁舌31朝向左侧移动;连接块3211移动至锁壳组件10左侧时,连接块3211与限位件3212脱离;限位件复位件3242基于自身形变所产生的作用力,带动限位件3212逆时针转动,并转动至与连接块3211的端部相对的位置;
[0131]
斜锁舌80的左侧与扣板90相抵接,且仍位于锁壳组件10内部,斜锁舌复位件323仍处于压缩状态;
[0132]
当门完全闭合时,驱动电机41启动并驱动第二锥齿42转动,第二锥齿与第一锥齿配合,使传动齿轮53顺时针转动,进而依次带动驱动件55转动,使主锁舌拨块56逆时针转
动;进而推动定位块22及锁舌部21朝向左侧移动,以使锁舌部21完全伸出锁壳组件10;主锁舌20的最终状态为:锁舌部21伸出锁壳组件10并伸入扣板90处的主锁舌对应孔91,第一传动部561抵持在凹口221的第一侧壁,第一滑动开孔221的右侧与第二柱体12相接触;
[0133]
用户通过使用插芯插入第二插槽732并逆时针转动保险锁舌拨块731,进而带动保险锁传动件733逆时针转动;保险锁传动件733逆时针转动时,其端部与第二凹口721的左侧端部相抵接,并推动保险锁定位块72及保险锁舌71朝左侧移动,并拉伸保险锁复位弹簧74;保险锁舌机构70的最终状态为:保险锁舌71伸出锁壳组件10并伸入扣板90上的保险锁舌对应孔93内,保险锁拨块731抵持在保险锁定位块72上,保险锁复位弹簧处于拉伸状态,第五柱体75位于第二滑动开孔722的右侧。
[0134]
可以理解的是,本实施例中的全自动锁100的解锁过程为:
[0135]
驱动电机41启动带动驱动件转动,进而使主锁舌拨块56顺时针转动;第一传动部561逆时针转动并与第一凹口221的第二侧壁相抵接,进而推动主锁舌20朝右侧(即第二侧面18)移动;
[0136]
另外,当第二传动齿轮55顺时针转动时,带动第一凸部551顺时针转动并推动第一拨片60朝上移动;进而第一拨片60的端部与传动抵接部3218抵接,并推动限位件3212顺时针移转动,以使连接块3211与限位件3212呈错开状态;在双向锁舌31受外力挤压时,可推动连接块3211朝向右侧移动;当门板与门框完全脱离时,双向锁舌31的所受外力消失,双向锁舌31朝左侧移动,进而令双向锁舌31伸出锁壳组件10;
[0137]
斜锁舌80脱离门框时,其受到门框的挤压力消失,进而,斜锁舌复位件323将由压缩状态回复为松弛状态,并带动连接件322及斜锁舌80朝向左侧移动,以使斜锁舌80伸出锁壳组件10,也使抵压部3221与第二配合部3216相抵接,进而令限位件3212与连接块3211相错开,从而可使双向锁舌31可基于外力回缩至锁壳组件10内。
[0138]
以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书及附图内容所作的等效结构变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1