基于物联网技术的SCARA机械手远程控制系统的制作方法
基于物联网技术的scara机械手远程控制系统
技术领域
[0001]
本实用新型涉及机械手控制领域,尤其涉及一种基于物联网技术的scara机械手远程控制系统。
背景技术:
[0002]
随着工业化进程的发展,生产自动化水平的提高,工业机器人的应用越来越广泛;在焊接、搬运、装配码垛等工业领域发挥着重要作用;当前scara机械手广泛应用于汽车、电子、食品领域,其主要职能是完成搬运和装配工作。scara机械手的在工业现场应用时,需要有工程师在现场手动示教,其有线示教器有固定长度(约10米),且耗材较为珍贵不利于远程示教,无线示教盒受示教距离的限制(约1000米),无法实现远程控制。在大部分情况下办公室人员无法查看和操作scara机械手,使得工厂的信息得不到有效的远程监控,数据更新不及时;
[0003]
随着科技的发展,物联网技术得到了广泛的运用。现有的scara机械手普遍采用基于嵌入式控制系统+运动控制芯片的架构体系,支持传统的tcp/ip、modbus tcp协议。因此,利用物联网技术实现scara机械手远程控制成为一种可能。
技术实现要素:
[0004]
本实用新型的目的是为了提供一种基于物联网技术的scara机械手远程控制系统,实现了scara机械手的远程控制与数据监测。
[0005]
为解决以上技术问题,本实用新型的技术方案为:基于物联网技术的scara机械手远程控制系统,包括scara机械手、运动控制器、物联网网关、云服务器和接入互联网的示教器;运动控制器的信号端连接于scara机械手用于将接收的运动控制信号输出送到scara机械手相应的驱动器或执行器,进而完成对scara机械手的控制;运动控制器与物联网网关连接的接口为rs485串行通信接口;物联网网关与运动控制器连接的接口为rs485串行通信接口;物联网网关与服务器之间采用无线通信模块进行通讯;服务器中设有用于存储控制器数据的服务器数据库;示教器用于将用户输入scara机械手的示教数据并发送至服务器。
[0006]
按以上方案,rs485串行通信接口设定为modbus tcp协议,实现与物联网网关的通讯;物联网网关与服务器之间无线通信模块采用的是4g无线通信,仅通过1张4g的流量卡就可以轻松的把要联网的设备连接到网络上,省却了架设线路、租用网络申请公网固定ip地址的麻烦,使用非常方便,将连接有机械手的运动控制器连接到远程网络中,无需考虑网络布设。
[0007]
按以上方案,服务器和物联网网关之间的无线通信模块设定为ssh协议进行通讯;服务器和接入互联网的示教器之间通过http协议进行通讯;ssh协议保证了在不安全的网络中数据安全的远程访问控制。
[0008]
按以上方案,物联网网关采用的是繁易fbox-4g物联网网关;该网关实现设备的远程互联;工作电压为24 v,数据监控点个数最大为500,支撑定时上传和变化上传,支持多种
无线接入方式:2g、3g、4g(移动/联通/电信)、以太网;串行通讯接口支持rs232、 rs485、rs422;满足运动控制器和服务器数据传输的需求。fbox-4g物联网网关通过4g电话流量卡联网,将运动控制器的数据发布到服务器数据库中,用于可以随时查看运动控制器的数据并对机械手进行远程示教。
[0009]
按以上方案,运动控制器采用的是翠欧trio运动控制器;具体采用的是 euro205x控制器;该控制器采用了独立的120mhz的dsp微处理器技术,提高了电机运动和计算的处理速度,该控制器可以控制1~5个轴的伺服电机或步进电机或者是二者的任意结合;32-bit的33mhz的传输功率,还设有can总线口,可以根据设备的需要对i/o和模拟输入口进行扩展。
[0010]
按以上方案,scara机械手采用的是埃斯顿scara机械手,型号为er6-600。
[0011]
按以上方案,云服务器采用的是埃斯顿云服务器。
[0012]
按以上方案,示教器采用的是接入互联网的手机或pc终端。
[0013]
本实用新型具有如下有益效果:本实用新型的基于物联网技术,采用物联网网关和服务器,实现了运动控制器数据与埃服务器数据交互的方式,实现了scara机械手的远程控制,从而解决了有线示教与无线示教盒因距离原因而无法示教的问题,进一步解决了scara机械手数据远程监测的问题,实现了运动控制器数据的信息化、可视化、可远程操作化,丰富了示教方式的同时也节约了客户示教盒的成本,使得用户通过本地接入互联网的示教器完成scara机械手的示教。
附图说明
[0014]
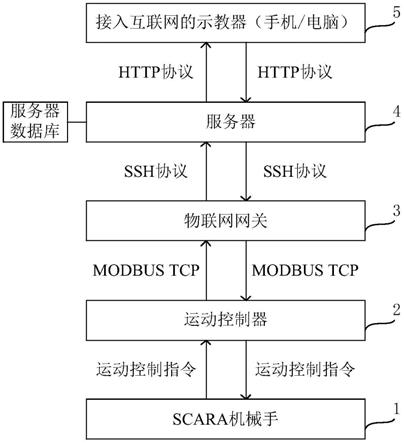
图1为本实用新型实施例整体结构示意框图。
[0015]
附图标记:1、scara机械手;2、运动控制器;3、物联网网关;4、服务器;5、示教器。
具体实施方式
[0016]
为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本实用新型作进一步详细说明。
[0017]
请参考图1,本实用新型为一种基于物联网技术的scara机械手1远程控制系统,其包括scara机械手1、运动控制器2、物联网网关3、云服务器4和接入互联网的示教器5。
[0018]
scara机械手1采用的是埃斯顿scara机械手,型号为er6-600。
[0019]
运动控制器2的信号端连接于scara机械手1用于将接收的运动控制信号输出送到scara机械手1相应的驱动器或执行器,进而完成对scara机械手1的控制;运动控制器2与物联网网关3连接的接口为rs485串行通信接口;rs485串行通信接口设定为modbus tcp协议以获取控制器的实时数据。
[0020]
运动控制器2接收运动控制的各种数据信息,再经微处理器运算,计算各坐标轴的坐标增量并转化成脉冲和方向信号控制电机驱动器,带动电机,完成各轴运动,在运动中还接受各轴编码器的反馈信号,以对控制进行修正来满足高精度控制;本实施例中,运动控制器2采用的是翠欧trio运动控制器;具体采用的是 euro205x控制器,该控制器采用了独立的120mhz的dsp微处理器技术,提高了电机运动和计算的处理速度,该控制器可以控制1~5个轴的伺服电机或步进电机或者是二者的任意结合;32-bit的33mhz的传输功率,还设有can总线口,可以根据设备的需要对i/o和模拟输入口进行扩展。
[0021]
物联网网关3与运动控制器2连接的接口为rs485接口,rs485接口设定为modbus tcp协议;物联网网关3与服务器4之间采用无线通信模块进行通讯;服务器4中设有用于存储控制器数据的服务器4数据库;服务器4和物联网网关3之间的无线通信模块设定为ssh协议进行通讯;服务器4和接入互联网的示教器5之间通过http协议进行通讯;示教器5用于将用户输入scara机械手1的示教数据并发送至服务器4。
[0022]
本实施例中,物联网网关3采用的是繁易fbox-4g物联网网关3,服务器4采用的是埃斯顿云服务器4,示教器5采用的是接入互联网的手机或pc终端。繁易fbox-4g物联网网关3的cpu采用的是600mhz arm cortex-a8,信号传输速率快;电源具备雷击浪涌保护。繁易fbox-4g物联网网关3可实现设备的远程互联、远程下载和远程维护。工作电压为24 v,数据监控点个数最大为500,支撑定时上传和变化上传,支持多种无线接入方式:2g、3g、4g(移动/联通/电信)、以太网;串行通讯接口支持rs232、 rs485、rs422;满足运动控制器2和服务器4数据传输的需求,fbox-4g物联网网关3通过4g电话流量卡联网,将运动控制器2的数据发布到服务器4数据库中,用于可以随时查看运动控制器2的数据并对机械手进行远程示教。
[0023]
现有采用带有以太网模块的控制器,通过分配给设备独立的公网ip地址通过internet进行上网,实现远程监控;这同样需要架设通讯线路,同时还要向网络服务运营商申请的静态公网ip地址,独立的静态ip地址是昂贵的资源,申请和维护很麻烦,并且费用不低,这使得这种方式只能适用于关键设备,无法大规模的普及;随着4g网络的大力发展,无线网络的连接速度和稳定性相对于3g/2g都有了质的飞跃,使得各种设备通过4g网络联网成为可能;仅需要1张4g的手机流量卡就可以轻松的把要联网的运动控制器2与服务器4联网,省却了架设线路、租用网络申请公网固定ip地址的麻烦,使用非常方便,将连接有机械手的运动控制器2连接到一个远程网络中,无需考虑网络布设。
[0024]
本实用新型基于物联网技术的scara机械手1远程控制系统的操作方法为:
[0025]
步骤1:运动控制器2与物联网网关3之间采用modbus tcp通讯协议获取控制器的实时数据,物联网网关3通过所插入的流量卡连接服务器4数据库并向服务器4的数据库写入控制器的实时数据;
[0026]
步骤2:本地接入互联网的示教器5,通过网页浏览器访问服务器4的web服务端获取实时的运动控制器2数据,并通过网页按钮对服务器4数据库进行数据操作;
[0027]
步骤3:物联网网关3检测到服务器4数据库中的数据改变时,通过modbus tcp协议向对应的运动控制器2地址里写入与数据库相对应的数据值;
[0028]
步骤4:运动控制器2检测到对应地址的数据变化后,执行相应的运动控制指令,进一步驱动scara机械手1执行相应的动作,从而实现了scara机械手1的远程控制。
[0029]
本实用新型实现控制器数据与服务器4数据库之间的数据实时交互,从而实现了scara机械手1的远程控制与数据监测,解决了现有scara机械手1远程示教(大于1000米)的问题。
[0030]
以上内容是结合具体的实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1